小鹏VPA停车场记忆泊车功能试驾体验和解读
OTA,已经成为汽车智能化的标志性技术之一。
一辆智能汽车,通过不断的OTA,能够持续给用户带来价值和惊喜;而一辆无法OTA的汽车,将会打上“传统汽车”的标签。
汽车的使用场景和功能繁杂多样,产品经理和工程师在前期开发过程中,受制于时间和成本,很难面面俱到。
OTA能够让企业和用户,通过产品达成了一种联结和互动。用户在实际使用过程中对体验的反馈,成为OTA的重要来源。这种“用户心声”被企业有效“回应”的感觉,是一次非常有意义的品牌与用户间的连接。
当然,还有一些重要的新功能,往往像彩蛋一样带给用户惊喜。
2021年6月7日,小鹏汽车通过海报公布了一个新彩蛋,小鹏汽车不久将OTA最新的 Xmart OS 2.6.0 版本,新版本除了对NGP领航辅助自动驾驶、车机显示系统,以及语音系统的部分功能优化外,最重要的更新是推出VPA(Valet Parking Assist)停车场记忆泊车。

小鹏官方称这是目前“首个量产且不依赖于停车场改造的“最后一公里”泊车功能”。
小鹏汽车表示这是“地表最强自动泊车”,并欢迎友商做功能对比评测。
1、什么是VPA?
2021年6月9日,在小鹏汽车的智能体验活动上,小鹏汽车对此次OTA做了官方介绍,我们参加了VPA功能的试驾。
关于试驾体验,除了常规的场景外,我们还遇到了极端工况(详见后文第4节)
VPA无疑是这次升级中的重头戏,在智能日活动的开始,小鹏汽车专门介绍里小鹏VPA的特点。
这个功能解释一下就是:
车辆可以按照用户设定的路线,辅助驾驶员将车辆从设定路线的起点,开往设定路线的终点,并泊入终点附近已被系统记忆的车位。
正常情况下,类似NGP,驾驶员全程只需要监管车辆行驶即可,不需要手和脚的操作。
这个功能最常用的场景是,用户每次回家或公司进入地下停车场后,只要经过设定的点,车辆就可以自己按照固定路线驶向车位,并完成泊车。相当于有了一个停车场“私人代驾”, 为车主省去寻找找固定车位和停车的时间。
至于为什么推出VPA ,小鹏汽车表示,因为超低速场景是小鹏汽车规划的三个自动驾驶重要场景之一。另外两个场景是高速场景、城市场景。三大场景构成一个完整的闭环。
此前,高速场景已经推出了NGP领航辅助自动驾驶。超低速场景以停车场记忆泊车功能为开端。
2、小鹏的VPA有什么与众不同之处?
在小鹏汽车推出停车场记忆泊车功能之前,有很多车企和顶级供应商在研究最后一公里停车场停车功能,尤其是地下停车场的自动驾驶。
地下停车场GPS信号弱,车辆定位能力差,有时甚至完全没有信号,其次,目前还没有地图服务商提供地下停车场的导航地图。缺少定位和导航地图的支持,汽车难以实现自动驾驶。
之前车企和供应商的很多研究和产品,主要是希望以停车场场端设备作为感知和定位辅助,帮助车辆实现定位和路径规划。比如奔驰S级上曾推出过此功能,但是需要停车场场端设备作为感知支持。
这种方式的问题是难以大规模推广:
一是车端成本高,需要额外加装与场端设备进行感知交互的设备,过高的成本下只有奔驰S级这样的豪车才能够承担;
二是依赖停车场场端智能,需要设备运营商和停车场一家一家去谈,大规模推广能力差,这种方式时间和成本无疑是惊人的。
作为对成本和规模异常敏感的车企,最希望的方式一定是车端智能,而且以低成本的方式实现。
小鹏汽车推送的VPA最大的特点就是,不额外增加任何硬件成本,不依赖停车场场地改造。
3、如何实现VPA?
为了实现单车智能,小鹏在VPA场景下,对感知系统和算法做了全新的规划。
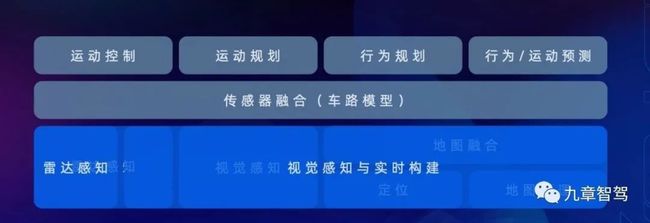
首先是感知系统的变化。
地下停车场环境GPS信号差,毫米波雷达在这种场景下,回波非常多,墙壁、顶棚、汽车等金属的干扰性强,毫米波雷达几乎不可用。
在高速场景下,车辆需要看得远,但是在停车场这样的低速场景下,视觉的FOV更重要,车辆需要看得广。
小鹏汽车表示,VPA在感知上,以视觉输入为主,实现目标识别、测距等功能。VPA动用了P7身上包括前视、侧视和环视等车身所有摄像头,组成了360°全视场覆盖。
此外,在车辆行驶过程中,车身出现俯仰(如压过减速带)情况,会造成摄像头视角变化,改变目标物在画面中的方位,引起判断偏差。为消除误差,车辆将融合惯性导航数据,结合车身姿态数据进行修正。
算法层面的改进要比感知系统还要大。
为了实现车辆定位和路径规划,小鹏汽车开发了“语义地图+匹配算法”复现记忆的路线的方式。
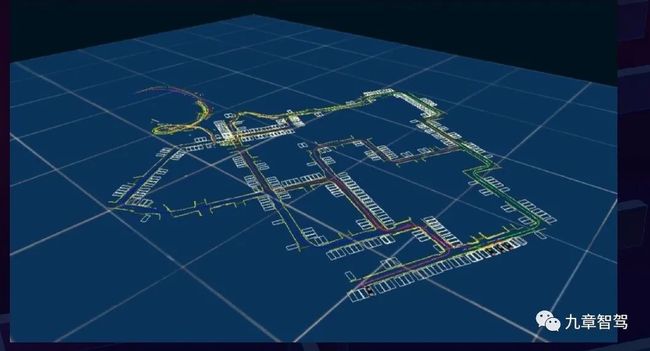
语义地图是指通过采集和识别停车场环境元素以及车辆位置信息,融合生成鸟瞰视角的环境信息。
在路线记忆过程中,语义地图会识别路线上的“地标元素”(比如说车道线、柱子、路口等),同时获得车辆与“地标元素”间的距离等相对位置信息。
停车场记忆泊车使用时,车辆以记忆中的“地标元素”为依据,不断调整行驶路线,将记忆中的元素位置与当前的元素位置进行匹配重合,从而让车辆准确复现记忆的路线。同时,融合惯性导航的数据,进一步帮助车辆完成定位和线路指引。
除此之外,小鹏针对停车场复杂环境中车辆及行人行为预测困难,进行系统专项训练,当使用停车场记忆泊车功能时,面对出现的车辆或者路边行人等,通过系统的专项训练,对其行为作出预判。
语义地图和记忆路径,帮助车辆解决了定位和路径规划问题。
这两大特点,就是小鹏汽车敢于声称这是目前“首个量产且不依赖于停车场改造的“最后一公里”泊车功能”的原因。
虽然加了很长的定语,但是几乎0成本和车端智能,的确是目前实现“最后一公里泊车”功能成本最低,泛化能力最强的解决方案。
此外,小鹏汽车还表示,VPA算法是小鹏汽车完全自研,不依赖供应商,因此更新和迭代速度更快,并且欢迎友商进行功能体验对比。
4、小鹏VPA的性能和体验如何?
本次VPA体验在北京大兴荟聚购物中心,这个停车场有6652个车位数量,曾荣获“最大地下停车场”吉尼斯世界纪录称号。因此,这里测试在场地尺寸上能够几乎满足所有的停车场,
首先是,VPA停车场记忆泊车的使用方式,分为两个步骤:
1、设定路线(学习泊车路线),用户以同一停车楼层的某个位置为起点(比如停车场进口处),手动驾驶车辆到固定停车位,并手动泊车入位。
2、激活功能(使用记忆泊车):下一次经过设定路线的起点时(速度要慢),系统弹出记忆停车功能卡,激活此功能。
结合试乘体验,以及工程问答交流,VPA功能的体验如下:
1. 目前只适用于车位划线清晰的地下停车场,暂时不支持地面停车场,未来会增加地面停车场以及停车楼,最终会做全场景覆盖。
2. 当前适用车型为搭载XPILOT 3.0系统,且购买软件的小鹏P7智尊版和鹏翼版。
3. 基于安全考虑,当前推送的版本只支持同一楼层的路线,但是正在研发的工程demo版可以识别跨楼层,会在后续版本中增加跨楼层路线。
4. 跨楼层的算法,车辆通过判断是否下坡,高低差,融合算法,可以算出在第几个楼层。
5. 单个停车场只记忆一条路线,最长路线记忆长度为1km,单车可支持学习100个停车场路线。
6. 车辆第一次学习时,人工驾驶速度不能超过15km/h,且路线不允许出现重复线路。
7. 在完成初次记忆路线学习之后,车辆需要回到地面, GPS 需要恢复信号并重新定位。进入停车场后,GPS 信号就失效了,之后全部基于语义地图的定位。
8. 目前的Xavier 芯片的算力足够支持所有VPA场景下所有摄像头的运算,但具体所需算力未透露。
9. VPA启动时,不用 100% 回到记忆地图的起点启动,可以从路线的任何一个位置启动,但是车速要慢。
10. 车辆在自动驾驶状态,正常车速为5-7km/h。
11. 在行驶过程中可以实现自动调节车速、自动转弯、自动绕行障碍物、自动会车、自动停车避让行人、自动避让出入库车辆等功能,如果固定车位被占用,则停在车位附近。
12. 在车辆显示屏记忆泊车SR界面,可显示停车场中多种元素,包括停车位、柱子、减速带等静态元素,以及车辆、行人等动态元素,目前还不能识别购物车,宠物,隔离桩等物体,后续会增加。

13. 车辆对行人的安全权限较高,在遇到儿童,行人推购物车,十字路口等复杂场景时,车速变慢,可能会通过语音、视觉提醒人工注意准备接管,用户直观了解系统状态、行驶路径,目标车位、下一步状态以及使用边界。
14. 关于路线共享问题,在没有解决用户是否同意这个问题的前提下,小鹏暂时不会做共享记忆路线和车位。
15. 目前的版本临近道路尽头的车位留给系统的泊车空间有限,暂时还无法覆盖。训练场景还未覆盖无车位线的车位。
16. 如果想泊入非固定车位,目前可以通过记忆泊车到车位附近,再由自动泊车来衔接进行泊入。但是,非固定车位泊车很快会推出。
17. 目前还无法识别地面箭头,但是已经在做地面箭头识别,解决逆行问题,后续版本会加入。
18. VPA结合小鹏超充车位自主导航功能也在规划中,可以把超充车位的行驶路径下放给车主,未来将实现这一场景。比如在陌生的停车场自主导航到小鹏超充车位。
19. 停车场记忆泊车功能开启时,基于安全和法规限制,人不能下车,记忆泊车不是自动驾驶,不能完全替代驾驶员。
20. 目前还没有停车场主动应招功能,但是后续有计划推出,最终实现自主召回和自主泊车。
在本次试驾时,我们遇到了一个极端案例:在一个十字路口,车辆需要做一个无保护左转,但是对面正好有来车,而且对向车辆正好停在车辆左侧,由于左转空间受限,车辆在路口减速慢行。
在这个场景下,我们能看到车辆行驶速度很低,处于犹豫不决的状态。但是遗憾的是,由于后面车辆催促,我们人工接管完成转向,人工接管后VPA可以恢复开启。最终我们也不确定它是否能够完成这个转向。
总体上,小鹏VPA在行驶过程中,速度较低,驾驶风格非常谨慎保守,和新手司机差不多,但是在找到停车位后,自动泊车时,泊车效率很高,很多时候一把进。
从小鹏VPA的实际体验和官方介绍看,小鹏汽车正逐步实现自动驾驶所有场景的覆盖,很多用户构想中的功能,比如自主召回,超充车位主动领航等实用功能已经在研发当中。
另外,小鹏汽车自动驾驶全栈自研,不依赖供应商,在数据收集和版本更迭上速度和效率更高,这是很多功能率先推出的重要原因。
5、还有哪些小升级?
除了VPA,新的2.6.0系统还对NGP以及车机系统,座舱交互做了新的升级和优化。
比如新增NGP状态下,驾驶员可唤醒小P说「帮我向左变道」「请把前面的车超了」,控制车辆实现向左变道和向右变道语音控制变道功能,这是业内首个通过语音控制驾驶辅助变道的功能。

新增NGP状态下远离大型车辆功能,新增NGP自恢复功能,优化了NGP应对切入车辆时的减速体验,以及NGP 状态下仪表引导线等内容显示。
根据小鹏汽车最新的数据,最新版本的NGP在接管次数,变道超车,进出匝道以及隧道通行等方面较当前的版本有了进一步提升。

在座舱内部,进一步优化音乐的全场景语音体验:支持语音点播歌单、专辑,并优化语音搜索返回结果。可以唤醒小P说「播放周杰伦的专辑」「播放爵士歌单」「听广东的电台」。
此外,方向盘上的摄像头被开启,用户驾驶员状态安全监测(DMS):在NGP、LCC工作时,对驾驶员状态进行持续观察,当发现分神或者闭眼等危险行为时进行提醒。
小鹏表示只监测面部状态,检测是否走神分心,不做人脸识别,也不做任何储存。
其他的优化还包括驾驶员仪表显示优化,包括导航卡片新增车道显示、能耗卡片新增瞬时功率显示、仪表内P7的3D模型优化;新增可使用方向盘开关空调,优化SayHi 灯语,新增日间光剑模式,新增停车时门扣手氛围灯常亮等小功能。
在造车新势力中,小鹏汽车是将“智能牌”作为王牌的那家,不仅全部全栈自研,而且其自动驾驶路线非常清晰、明确。

目前正依靠OTA,不断将规划落地。按照规划,明年将释放城区场景NGP的Xpilot 3.5,届时小鹏的自动驾驶更加值得期待。
推荐阅读(超连接):
我们的个人命运,三分靠打拼,七分靠产业红利——《九章智驾》创刊词
一文了解线控制动市场格局——7家公司10款产品盘点
远离参数之争,深度解读Livox 激光雷达车规之路
自动驾驶OS市场的现状及未来
“L3级”自动驾驶落地指导思想:高速辅助人,低速替代人
关于激光雷达,投资者及车企感兴趣的12个问题
造车2.0时代的十大趋势
推荐个展会及同期举办的论坛,感兴趣的请扫描图片中二维码报名: