概述Linux内核驱动之GPIO子系统API接口
1、前言
在嵌入式Linux开发中,对嵌入式SoC中的GPIO进行控制非常重要,Linux内核中提供了GPIO子系统,驱动开发者在驱动代码中使用GPIO子系统提供的API函数,便可以达到对GPIO控制的效果,例如将IO口的方向设置为输入或输出,当IO口的方向为输入时,可以通过调用API函数获取相应的IO口电平,当IO口设置为输出方向时,可以调用相关的API函数去设置IO口电平,本文将简单描述如何去使用Linux内核中GPIO子系统的API接口。
下图是Linux内核中GPIO子系统的软件驱动分层图:

2、常用API接口
当我们在驱动代码中要使用内核中提供的GPIO子系统,需要在驱动代码中包含
/*
* "valid" GPIO numbers are nonnegative and may be passed to
* setup routines like gpio_request(). only some valid numbers
* can successfully be requested and used.
*
* Invalid GPIO numbers are useful for indicating no-such-GPIO in
* platform data and other tables.
*/
static inline bool gpio_is_valid(int number)
{
return number >= 0 && number < ARCH_NR_GPIOS;
}函数gpio_is_valid()用来判断获取到的gpio号是否是有效的,只有有效的gpio号,才能向内核中进行申请使用,因此,当我们从设备树的设备节点获取到gpio号,可以使用该函数进行判断是否有效。
/* Always use the library code for GPIO management calls,
* or when sleeping may be involved.
*/
extern int gpio_request(unsigned gpio, const char *label);
extern void gpio_free(unsigned gpio);上面这两个函数用来向系统中申请GPIO和释放已经申请的GPIO,在函数gpio_request()中传入的形参中,gpio为IO号,label为向系统中申请GPIO使用的标签,类似于GPIO的名称。
/**
* struct gpio - a structure describing a GPIO with configuration
* @gpio: the GPIO number
* @flags: GPIO configuration as specified by GPIOF_*
* @label: a literal description string of this GPIO
*/
struct gpio {
unsigned gpio;
unsigned long flags;
const char *label;
};结构体struct gpio用来描述一个需要配置的GPIO。
extern int gpio_request_one(unsigned gpio, unsigned long flags, const char *label);
extern int gpio_request_array(const struct gpio *array, size_t num);
extern void gpio_free_array(const struct gpio *array, size_t num);上面的3个函数也是用来向系统申请或者释放GPIO资源,函数gpio_request_one()用来申请单个GPIO,但是在申请的时候可以设置flag标志,例如,该函数在申请GPIO资源的同时,直接将GPIO的方向设置为输入或者输出,函数gpio_request_array()和gpio_free_array()用来向系统中申请或者释放多个GPIO资源。
/* CONFIG_GPIOLIB: bindings for managed devices that want to request gpios */
struct device;
int devm_gpio_request(struct device *dev, unsigned gpio, const char *label);
int devm_gpio_request_one(struct device *dev, unsigned gpio,
unsigned long flags, const char *label);
void devm_gpio_free(struct device *dev, unsigned int gpio);上面的3个函数也是用来向系统申请或者释放GPIO资源,但是函数带有devm_前缀,也就是说,这是带设备资源管理版本的函数,因此在使用上面的函数时,需要指定设备的struct device指针。
static inline int gpio_direction_input(unsigned gpio)
{
return gpiod_direction_input(gpio_to_desc(gpio));
}
static inline int gpio_direction_output(unsigned gpio, int value)
{
return gpiod_direction_output_raw(gpio_to_desc(gpio), value);
}当我们使用gpio_request()函数向系统中申请了GPIO资源后,可以使用上面的函数进行GPIO的方向设置,函数gpio_direction_input()用来设置GPIO的方向为输入,函数gpio_direction_output()用来设置GPIO的方向为输出,并且通过value值可以设置输出的电平。
static inline int gpio_get_value(unsigned int gpio)
{
return __gpio_get_value(gpio);
}
static inline void gpio_set_value(unsigned int gpio, int value)
{
__gpio_set_value(gpio, value);
}当我们将GPIO的方向设置为输入时,可以使用上面的函数gpio_get_value()来获取当前的IO口电平值,当GPIO的方向设置为输出时,使用函数gpio_set_value()可以设置IO口的电平值。
static inline int gpio_cansleep(unsigned int gpio)
{
return __gpio_cansleep(gpio);
}使用函数gpio_cansleep()判断是否能处于休眠状态,当该函数返回非零值时,说明读或写GPIO的电平值时能够处于休眠状态。
static inline int gpio_get_value_cansleep(unsigned gpio)
{
return gpiod_get_raw_value_cansleep(gpio_to_desc(gpio));
}
static inline void gpio_set_value_cansleep(unsigned gpio, int value)
{
return gpiod_set_raw_value_cansleep(gpio_to_desc(gpio), value);
}上面的函数同样是获取或者设置GPIO的电平值,只不过是带休眠版本的函数。
static inline int gpio_to_irq(unsigned int gpio)
{
return __gpio_to_irq(gpio);
}函数gpio_to_irq()用于将当前已经申请GPIO号转换为IRQ号,也就是获取当前GPIO的中断线,函数调用成功后,将返回对应的IRQ号。
以上就是Linux内核中GPIO子系统的常用的API接口,关于其代码的实现,可以进一步分析Linux内核源码。
【文章福利】小编推荐自己的Linux内核技术交流群: 【977878001】整理一些个人觉得比较好得学习书籍、视频资料共享在群文件里面,有需要的可以自行添加哦!!!前100进群领取,额外赠送一份 价值699的内核资料包(含视频教程、电子书、实战项目及代码)
内核资料直通车:Linux内核源码技术学习路线+视频教程代码资料
学习直通车:Linux内核源码/内存调优/文件系统/进程管理/设备驱动/网络协议栈
3、实例说明
在上面,已经分析过了Linux驱动中GPIO子系统的常用API接口函数,接下来,将通过一个具体的实例来讲解GPIO子系统中API接口如何使用。
首先,先了解一下GPIO的使用思路,如下所示:
#include
#include
#include
...
struct gpio_drvdata {
/* gpio号 */
int gpio_num;
...
};
static int __init gpio_init(void)
{
struct gpio_drvdata *ddata;
int ret;
ddata = kzalloc(sizeof(*ddata), GFP_KERNEL);
if (!ddata)
return -ENOMEM;
...
/* gpio初始化 */
if (gpio_is_valid(ddata->gpio_num)) {
/* 申请gpio资源 */
ret = gpio_request(ddata->gpio_num, "test-gpio");
if (ret) {
printk("failed to request gpio\n");
return ret;
}
/* 设置gpio的方向(输出) */
ret = gpio_direction_output(ddata->gpio_num, 0);
if (ret) {
printk("failed to set output direction\n");
return ret;
}
/* 在sysfs中导出gpio(方向能改变) */
ret = gpio_export(ddata->gpio_num, true);
if (ret) {
printk("failed to export gpio in sysfs\n");
return ret;
}
/* 设置gpio电平值(高电平) */
gpio_set_value(ddata->gpio_num, 1);
}
...
return 0;
}
static void __exit gpio_exit(void)
{
...
/* 释放已经申请的gpio资源 */
if (gpio_is_valid(ddata->gpio_num))
gpio_free(ddata->gpio_num);
...
}
module_init(gpio_init);
module_exit(gpio_exit); 上面的代码已经很清楚地体现了GPIO的使用思路,当驱动模块加载的时候,需要获取要使用的GPIO号,然后需要向系统申请使用GPIO资源,资源申请成功后,我们需要设置GPIO的方向(输入或者输出),此外,还能使用gpio_export()函数在sysfs中导出GPIO,导出的好处在于可以方便地debug代码,当驱动模块卸载时,需要将已经申请的GPIO资源进行释放掉,基本的使用思路就这样,比较简单。
接下来,给出具体的实例,功能为简单的GPIO控制,驱动程序中嵌入platform_driver框架,另外,在设备节点中导出ctrl和gpio两个属性文件,应用层对ctrl属性文件进行读写操作,能够获取和设置GPIO的电平状态,对gpio读操作,能够获取使用的GPIO号,下面是具体实例的实现过程:
先定义相关的设备节点,如下:
dev_gpio {
status = "okay";
compatible = "dev-gpio";
label = "test_gpio";
gpios = <&msm_gpio 68 0>;
};使用了GPIO_68这个引脚,compatible属性的值用于和驱动程序进行匹配,接下来是驱动代码的实现:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
struct gpio_platform_data {
const char *label;
unsigned int gpio_num;
enum of_gpio_flags gpio_flag;
};
struct gpio_drvdata {
struct gpio_platform_data *pdata;
bool gpio_state;
};
static ssize_t ctrl_show(struct device *dev,
struct device_attribute *attr, char *buf)
{
struct gpio_drvdata *ddata = dev_get_drvdata(dev);
int ret;
if (ddata->gpio_state)
ret = snprintf(buf, PAGE_SIZE - 2, "%s", "enable");
else
ret = snprintf(buf, PAGE_SIZE - 2, "%s", "disable");
buf[ret++] = '\n';
buf[ret] = '\0';
return ret;
}
static ssize_t ctrl_store(struct device *dev,
struct device_attribute *attr, const char *buf, size_t count)
{
struct gpio_drvdata *ddata = dev_get_drvdata(dev);
bool state = ddata->gpio_state;
if (!strncmp(buf, "enable", strlen("enable"))) {
if (!state) {
gpio_set_value(ddata->pdata->gpio_num, !state);
ddata->gpio_state = !state;
goto ret;
}
} else if (!strncmp(buf, "disable", strlen("disable"))) {
if (state) {
gpio_set_value(ddata->pdata->gpio_num, !state);
ddata->gpio_state = !state;
goto ret;
}
}
return 0;
ret:
return strlen(buf);
}
static DEVICE_ATTR(ctrl, 0644, ctrl_show, ctrl_store);
static ssize_t gpio_show(struct device *dev,
struct device_attribute *attr, char *buf)
{
struct gpio_drvdata *ddata = dev_get_drvdata(dev);
int ret;
ret = snprintf(buf, PAGE_SIZE - 2, "gpio-number: GPIO_%d",
ddata->pdata->gpio_num - 911);
buf[ret++] = '\n';
buf[ret] = '\0';
return ret;
}
static DEVICE_ATTR(gpio, 0444, gpio_show, NULL);
static struct attribute *gpio_attrs[] = {
&dev_attr_ctrl.attr,
&dev_attr_gpio.attr,
NULL
};
static struct attribute_group attr_grp = {
.attrs = gpio_attrs,
};
static struct gpio_platform_data *
gpio_parse_dt(struct device *dev)
{
int ret;
struct device_node *np = dev->of_node;
struct gpio_platform_data *pdata;
pdata = kzalloc(sizeof(*pdata), GFP_KERNEL);
if (!pdata) {
dev_err(dev, "failed to alloc memory of platform data\n");
return NULL;
}
ret = of_property_read_string(np, "label", &pdata->label);
if (ret) {
dev_err(dev, "failed to read property of lable\n");
goto fail;
}
pdata->gpio_num = of_get_named_gpio_flags(np, "gpios",
0, &pdata->gpio_flag);
if (pdata->gpio_num < 0) {
dev_err(dev, "invalid gpio number %d\n", pdata->gpio_num);
ret = pdata->gpio_num;
goto fail;
}
return pdata;
fail:
kfree(pdata);
return ERR_PTR(ret);
}
static int gpio_probe(struct platform_device *pdev)
{
struct gpio_drvdata *ddata;
struct gpio_platform_data *pdata;
struct device *dev = &pdev->dev;
struct device_node *np = dev->of_node;
int ret;
printk("[%s]==========gpio_probe start==========\n", __func__);
if (!np) {
dev_err(dev, "failed to find device node of gpio device\n");
return -ENODEV;
}
ddata = kzalloc(sizeof(*ddata), GFP_KERNEL);
if (!ddata) {
dev_err(dev, "failed to alloc memory for driver data\n");
return -ENOMEM;
}
pdata = gpio_parse_dt(dev);
if (IS_ERR(pdata)) {
dev_err(dev, "failed to parse device node\n");
ret = PTR_ERR(pdata);
goto fail1;
}
if (gpio_is_valid(pdata->gpio_num)) {
ret = gpio_request(pdata->gpio_num, pdata->label);
if (ret) {
dev_err(dev, "failed to request gpio number %d\n",
pdata->gpio_num);
goto fail2;
}
ret = gpio_direction_output(pdata->gpio_num, 0);
if (ret) {
dev_err(dev, "failed to set gpio direction for output\n");
goto fail3;
}
ret = gpio_export(pdata->gpio_num, false);
if (ret) {
dev_err(dev, "failed to export gpio %d\n", pdata->gpio_num);
goto fail3;
}
}
ddata->gpio_state = false;
ddata->pdata = pdata;
platform_set_drvdata(pdev, ddata);
ret = sysfs_create_group(&dev->kobj, &attr_grp);
if (ret) {
dev_err(dev, "failed to create sysfs files\n");
goto fail3;
}
printk("[%s]==========gpio_probe over==========\n", __func__);
return 0;
fail3:
gpio_free(pdata->gpio_num);
fail2:
kfree(pdata);
fail1:
kfree(ddata);
return ret;
}
static int gpio_remove(struct platform_device *pdev)
{
struct gpio_drvdata *ddata = platform_get_drvdata(pdev);
struct gpio_platform_data *pdata = ddata->pdata;
sysfs_remove_group(&pdev->dev.kobj, &attr_grp);
if (gpio_is_valid(pdata->gpio_num))
gpio_free(pdata->gpio_num);
kfree(pdata);
pdata = NULL;
kfree(ddata);
ddata = NULL;
return 0;
}
static struct of_device_id device_match_table[] = {
{ .compatible = "dev-gpio",},
{ },
};
MODULE_DEVICE_TABLE(of, device_match_table);
static struct platform_driver dev_gpio_driver = {
.probe = gpio_probe,
.remove = gpio_remove,
.driver = {
.name = "dev-gpio",
.owner = THIS_MODULE,
.of_match_table = device_match_table,
},
};
module_platform_driver(dev_gpio_driver);
MODULE_AUTHOR("HLY");
MODULE_LICENSE("GPL v2"); 实现的思路和前面给出的模板一样,只不过是嵌入了platform_driver这个驱动框架,另外,在设备节点中导出了ctrl和gpio属性文件,便可以很方便地在应用层进行设备的GPIO控制了。
接下来,看看实现的效果,首先是生成的设备节点信息,可以使用下面的命令:
# ls -al
# cat uevent输出如下:

通过uevent可以看到设备节点的路径以及驱动和设备匹配的属性值,此外,在上面图片中,也可以看到ctrl和gpio属性文件已经被成功导出到了该设备节点下面,使用下面的命令可以进行GPIO的控制:
##将GPIO置高电平
# echo "enable" > ctrl
##将GPIO置低电平
# echo "disable" > ctrl控制的效果如下所示:
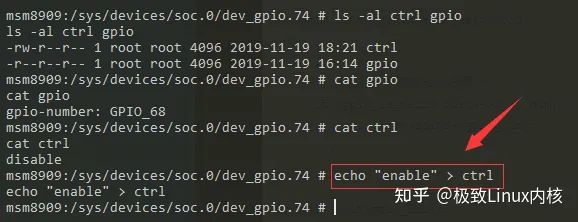
另外,在驱动程序中,我们使用了函数gpio_export()在sysfs中导出相关的GPIO信息,我们可以到/sys/class/gpio/gpioN目录下查看相关的GPIO信息,如下:

属性文件value保存了当前GPIO的电平值,当我们调用gpio_export()函数时,将第二个形参传入为true时,表示GPIO的方向还能改变,将在上面的目录中生成direction属性文件,里面保存了当前GPIO的方向,我们还能使用echo命令对文件进行写操作,从而改变GPIO的方向。
4、小结
本文简单介绍了Linux中GPIO子系统中的常用的API接口函数,并且给出了驱动程序中使用GPIO子系统的思路,另外还通过一个简单的实例进行说明。