u-boot启动详解
1. U-Boot启动流程分析
参考文献1 超详细分析Bootloader(Uboot)到内核的启动流程
1.1 U-boot主要目录结构:
- board 目标板相关文件,主要包含SDRAM、FLASH驱动;
- common 独立于处理器体系结构的通用代码,如内存大小探测与故障检测;
- cpu 与处理器相关的文件。如mpc8xx子目录下含串口、网口、LCD驱动及中断初始化等文件;
- driver 通用设备驱动,如CFI FLASH驱动(目前对INTEL FLASH支持较好)
- doc U-Boot的说明文档;
- examples可在U-Boot下运行的示例程序;如hello_world.c,timer.c;
- include U-Boot头文件;尤其configs子目录下与目标板相关的配置头文件是移植过程中经常要修改的文件;
- lib_xxx 处理器体系相关的文件,如lib_ppc, lib_arm目录分别包含与PowerPC、ARM体系结构相关的文件;
- net 与网络功能相关的文件目录,如bootp,nfs,tftp;
- post 上电自检文件目录。尚有待于进一步完善;
- rtc RTC驱动程序;
- tools 用于创建U-Boot S-RECORD和BIN镜像文件的工具;
1.2 第一阶段
总体调用关系:
u-boot.lds
start.S
_main
board_init_f
relocate_code
board_init_r
....
main_loop
- u-boot.lds(arch/arm/cpu/u-boot.lds)
对于任何程序,入口函数是在链接时决定的,uboot的入口是由链接脚本决定的。uboot下armv7链接脚本默认目录为arch/arm/cpu/u-boot.lds。这个可以在配置文件中与CONFIG_SYS_LDSCRIPT来指定。入口地址也是由连接器决定的,在配置文件中可以由CONFIG_SYS_TEXT_BASE指定。这个会在编译时加在ld连接器的选项-Ttext中.
/* SPDX-License-Identifier: GPL-2.0+ */
/*
* Copyright (c) 2004-2008 Texas Instruments
*
* (C) Copyright 2002
* Gary Jennejohn, DENX Software Engineering,
*/
#include - _start(arch/arm/cpu/armv7/start.S)
注: .S表示支持预处理语句,.s不支持预处理
在flash中执行的引导代码,也就是bootloader中的stage1,负责初始化硬件环境,把u-boot从flash加载到RAM中去,对CPU的一个初始化,然后跳到board/xilinx/zynq/board.c中去执行
汇编文件中的伪指令:
ENTRY: 用于指定汇编程序的入口点,一个源文件中最多只能有一个ENTRY,但是完整的汇编程序可以有多个ENTRY(此时程序入口由链接器指定)
为什么要关闭 Cache 呢,这是因为在设备刚上电的时候,内存的初始化会比较慢,当CPU 初始化完成后,内存此时还没做好准备,如果此时对内存进行数据读取,会导致数据预取异常。
为什么要关闭 MMU?在设备刚上电时,MMU 并为初始化;其次,在会汇编语言阶段一般是通过操作寄存器的实际物理地址进行配置。因此为了避免 MMU 的干扰,把其给屏蔽。
#include - lowlevel_init(arch/arm/cpu/armv7/lowlevel_init.S)
关闭看门狗、初始化系统时钟、初始 DDR、初始化串口,接着返回‘bl lowlevel_init’指令的下一条指令,继续执行为加载BootLoader的第二阶段代码准备RAM空间(初始化内存空间SDRAM)
/* SPDX-License-Identifier: GPL-2.0+ */
/*
* A lowlevel_init function that sets up the stack to call a C function to
* perform further init.
*
* (C) Copyright 2010
* Texas Instruments,
*
* Author :
* Aneesh V
*/
#include -
_main(arch/arm/lib/crt0.S)
设置初始化C运行环境以及调用boot_init_f()函数
/* * entry point of crt0 sequence */ ENTRY(_main) /* * Set up initial C runtime environment and call board_init_f(0). */ //栈指针sp初始化 #if defined(CONFIG_TPL_BUILD) && defined(CONFIG_TPL_NEEDS_SEPARATE_STACK) ldr r0, =(CONFIG_TPL_STACK) #elif defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK) ldr r0, =(CONFIG_SPL_STACK) #else ldr r0, =(CONFIG_SYS_INIT_SP_ADDR) #endif bic r0, r0, #7 /* 8-byte alignment for ABI compliance */ mov sp, r0 bl board_init_f_alloc_reserve mov sp, r0 /* set up gd here, outside any C code */ mov r9, r0 bl board_init_f_init_reserve #if defined(CONFIG_SPL_EARLY_BSS) SPL_CLEAR_BSS #endif mov r0, #0 bl board_init_f //跳转到board_init_f #if ! defined(CONFIG_SPL_BUILD) /* * Set up intermediate environment (new sp and gd) and call * relocate_code(addr_moni). Trick here is that we'll return * 'here' but relocated. */ //实现新的gd结构体的更新 ldr r0, [r9, #GD_START_ADDR_SP] /* sp = gd->start_addr_sp */ bic r0, r0, #7 /* 8-byte alignment for ABI compliance */ mov sp, r0 ldr r9, [r9, #GD_BD] /* r9 = gd->bd */ sub r9, r9, #GD_SIZE /* new GD is below bd */ adr lr, here ldr r0, [r9, #GD_RELOC_OFF] /* r0 = gd->reloc_off */ add lr, lr, r0 #if defined(CONFIG_CPU_V7M) orr lr, #1 /* As required by Thumb-only */ #endif ldr r0, [r9, #GD_RELOCADDR] /* r0 = gd->relocaddr */ b relocate_code //跳转到relocate_code(arch/arm/lib/relocate.S) here: /* * now relocate vectors */ bl relocate_vectors /* Set up final (full) environment */ bl c_runtime_cpu_setup /* we still call old routine here */ #endif #if !defined(CONFIG_SPL_BUILD) || CONFIG_IS_ENABLED(FRAMEWORK) #if !defined(CONFIG_SPL_EARLY_BSS) SPL_CLEAR_BSS #endif # ifdef CONFIG_SPL_BUILD /* Use a DRAM stack for the rest of SPL, if requested */ bl spl_relocate_stack_gd cmp r0, #0 movne sp, r0 movne r9, r0 # endif #if ! defined(CONFIG_SPL_BUILD) bl coloured_LED_init bl red_led_on //开发板的指示灯,上电or调试 #endif /* call board_init_r(gd_t *id, ulong dest_addr) */ mov r0, r9 /* gd_t */ ldr r1, [r9, #GD_RELOCADDR] /* dest_addr */ /* call board_init_r */ #if CONFIG_IS_ENABLED(SYS_THUMB_BUILD) ldr lr, =board_init_r /* this is auto-relocated! */ bx lr #else ldr pc, =board_init_r /* this is auto-relocated! */ #endif /* we should not return here. */ #endif ENDPROC(_main) -
board_init_f(common/board_f.c) 有差异
根据配置对全局信息结构体global data进行简单的初始化之后,调用位于init_sequence_f数组中的各种初始化API,进行各式各样的初始化动作。后面将会简单介绍一些和ARM平台有关的、和平台的移植工作有关的、比较重要的API
void board_init_f(ulong boot_flags) { gd->flags = boot_flags; gd->have_console = 0; //遍历执行init_sequence_f中的各API函数 if (initcall_run_list(init_sequence_f)) hang(); #if !defined(CONFIG_ARM) && !defined(CONFIG_SANDBOX) && \ !defined(CONFIG_EFI_APP) && !CONFIG_IS_ENABLED(X86_64) && \ !defined(CONFIG_ARC) /* NOTREACHED - jump_to_copy() does not return */ hang(); #endif } -
relocate_code(arch/arm/lib/relocate.S) 无差异
实现将uboot addr拷贝到relocaddr(其实就是将BootLoader的第二阶段的代码复制到SDRAM空间) —>具体函数解析 参考文献
前面讲过,u-boot是有可能在只读的memory中启动的。简单起见,u-boot假定所有的启动都是这样,因此u-boot的启动逻辑,都是针对这种情况设计的。在这种情况下,基于如下考虑:
1)只读memory中执行,代码需要小心编写(不能使用全局变量,等等)。
2)只读memory执行速度通常比较慢。
u-boot需要在某一个时间点,将自己从“只读memory”中,拷贝到可读写的memory(如SDRAM,后面统称RAM,注意和SRAM区分,不要理解错了)中继续执行,这就是relocation(重定位)操作。relocation的时间点,可以是“系统可读写memory始化完成之后“的任何时间点。根据u-boot当前的代码逻辑,是在board_init_f执行完成之后,因为board_init_f中完成了很多relocation有关的准备动作,具体可参考第5章的描述。
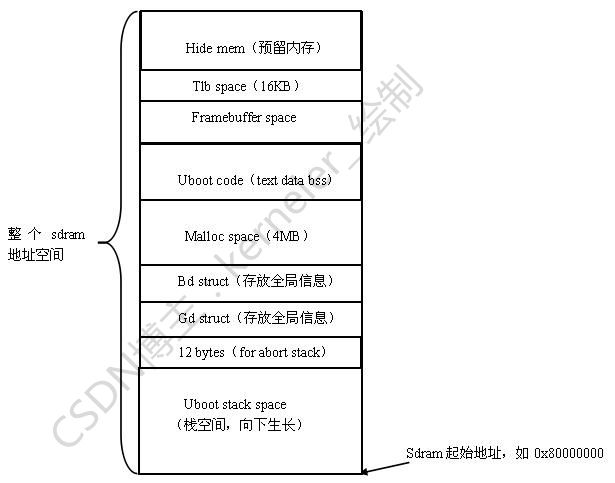
新版uboot在sdram空间分配上,是自顶向下,不管uboot是从哪里启动,spiflash,nandflash,sram等跑到这里code都会被从新定位到sdram上部的一个位置,继续运行。我找了一个2010.6版本的uboot大体看了一下启动代码,是通过判断_start和TEXT_BASE(链接地址)是否相等来确定是否需要relocate。如果uboot是从sdram启动则不需要relocate。新版uboot在这方面还是有较大变动。这样变动我考虑好处可能有二,一是不用考虑启动方式,all relocate code。二是不用考虑uboot链接地址,因为都要重新relocate。
uboot sdram空间规划图:
- board_init_r
板级初始化操作 参考
源代码在board_init_r(common/board_r.c):
void board_init_r(gd_t *new_gd, ulong dest_addr) { /* * Set up the new global data pointer. So far only x86 does this * here. * TODO([email protected]): Consider doing this for all archs, or * dropping the new_gd parameter. */ #if CONFIG_IS_ENABLED(X86_64) arch_setup_gd(new_gd); #endif #ifdef CONFIG_NEEDS_MANUAL_RELOC int i; #endif #if !defined(CONFIG_X86) && !defined(CONFIG_ARM) && !defined(CONFIG_ARM64) gd = new_gd; #endif gd->flags &= ~GD_FLG_LOG_READY; #ifdef CONFIG_NEEDS_MANUAL_RELOC for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++) init_sequence_r[i] += gd->reloc_off; //init_sequence_r[]有一堆初始化函数API指针 #endif if (initcall_run_list(init_sequence_r)) hang(); /* NOTREACHED - run_main_loop() does not return */ hang(); }init_sequence_r[]: 参考
1)initr_trace,初始化并使能u-boot的tracing system,涉及的配置项有CONFIG_TRACE。
2)initr_reloc,设置relocation完成的标志。
3)initr_caches,使能dcache、icache等,涉及的配置项有CONFIG_ARM。
4)initr_malloc,malloc有关的初始化。
5)initr_dm,relocate之后,重新初始化DM,涉及的配置项有CONFIG_DM。
6)board_init,具体的板级初始化,需要由board代码根据需要实现,涉及的配置项有CONFIG_ARM。
7)set_cpu_clk_info,Initialize clock framework,涉及的配置项有CONFIG_CLOCKS。
8)initr_serial,重新初始化串口(不太明白什么意思)。
9)initr_announce,宣布已经在RAM中执行,会打印relocate后的地址。
10)board_early_init_r,由板级代码实现,涉及的配置项有CONFIG_BOARD_EARLY_INIT_R。
11)arch_early_init_r,由arch代码实现,涉及的配置项有CONFIG_ARCH_EARLY_INIT_R。
12)power_init_board,板级的power init代码,由板级代码实现,例如hold住power。
13)initr_flash、initr_nand、initr_onenand、initr_mmc、initr_dataflash,各种flash设备的初始化。
14)initr_env,环境变量有关的初始化。
15)initr_secondary_cpu,初始化其它的CPU core。
16)stdio_add_devices,各种输入输出设备的初始化,如LCD driver等。
17)interrupt_init,中断有关的初始化。
18)initr_enable_interrupts,使能系统的中断,涉及的配置项有CONFIG_ARM(ARM平台u-boot实在开中断的情况下运行的)。
19)initr_status_led,状态指示LED的初始化,涉及的配置项有CONFIG_STATUS_LED、STATUS_LED_BOOT。
20)initr_ethaddr,Ethernet的初始化,涉及的配置项有CONFIG_CMD_NET。
21)board_late_init,由板级代码实现,涉及的配置项有CONFIG_BOARD_LATE_INIT。
22)等等…
23)run_main_loop/main_loop,执行到main_loop,开始命令行操作。
-
main_loop() (common/main.c)
主要功能包括:
(1)初始化启动次数限制机制
(2)Modem功能
(3)设置软件版本号
(4)启动延迟
(5)读取命令,解析命令
1.3 第二阶段
这部分主要是对各个外设进行初始化,对环境变量进行初始化。对应board_init_r()
1.3.1 初始化本阶段要使用到的硬件设备
为了方便开发,至少要初始化一个串口以便程序员与 Bootloader进行交互。
1.3.2 检测系统内存映射( memory map)
所谓检测内存映射,就是确定板上使用了多少内存、它们的地址空间是什么。由于嵌入式开发中 Bootloader多是针对某类板子进行编写,所以可以根据板子的情况直接设置,不需要考虑可以适用于各类情况的复杂算法。
1.3.3 将内核映象和根文件系统映象从 Flash上读到SDRAM空间中
Flash上的内核映象有可能是经过压缩的,在读到SDRAM之后,还需要进行解压。当然,对于有自解压功能的内核,不需要 Bootloader来解压。将根文件系统映象复制到SDRAM中,这不是必需的。这取决于是什么类型的根文件系统以及内核访问它的方法。
将内核存放在适当的位置后,直接跳到它的入口点即可调用内核。调用内核之前,下列条件要满足:
(1)CPU寄存器的设置
R0=0(规定)。
R1=机器类型ID;对于ARM结构的CPU,其机器类型ID可以参见 linux/arch/arm tools/ mach-types
R2=启动参数标记列表在RAM中起始基地址(下面会详细介绍如何传递参数)。
(2)CPU工作模式
必须禁止中断(IRQ和FIQ,uboot启动是一个完整的过程,没有必要也不能被打断)
CPU必须为SVC模式(为什么呢?主要是像异常模式、用户模式都不合适。具体深入的原因自己可以查下资料)。
(3) Cache和MMU的设置
MMU必须关闭。
指令 Cache可以打开也可以关闭。
数据 Cache必须关闭。
1.3.4 为内核设置启动参数
Bootloader与内核的交互是单向的, Bootloader将各类参数传给内核。由于它们不能同时行,传递办法只有一个:Bootloader将参数放在某个约定的地方之后,再启动内核,内核启动后从这个地方获得参数。
除了约定好参数存放的地址外,还要规定参数的结构。Linu2.4x以后的内核都期望以标记列表( tagged_list)的形式来传递启动参数。标记,就是一种数据结构;标记列表,就是挨着存放的多个标记。标记列表以标记 ATAG CORE开始,以标记 ATAG NONE结束。
标记的数据结构为tag,它由一个 tag_header结构和一个联合(union)组成。 tag_ header结构表小标记的类型及长度,比如是表示内存还是表示命令行参数等。对于不同类型的标记使用不同的联合(union),比如表示内存时使用 tag_mem32,表示命令行时使用 tag_cmdline。
bootloader与内核约定的参数地址,设置内存的起始地址和大小,指定根文件系统在那个分区,系统启动后执行的第一个程序linuxrc,控制台ttySAC0等。
1.3.5 调用内核
调用内核(start_kernel)就是uboot启动的最后一步了。到这里就uboot就完成了他的使命。
2. U-Boot移植主要修改的文件
从移植U-Boot最小要求-U-Boot能正常启动的角度出发,主要考虑修改如下文件:
① <目标板>.h头文件,如include/configs/RPXlite.h。可以是U-Boot源码中已有的目标板头文件,也可以是新命名的配置头文件;大多数的寄存器参数都是在这一文件中设置完成的;
② <目标板>.c文件,如board/RPXlite/RPXlite.c。它是SDRAM的驱动程序,主要完成SDRAM的UPM表设置,上电初始化。
③ FLASH的驱动程序,如board/RPXlite/flash.c,或common/cfi_flash.c。可在参考已有FLASH驱动的基础上,结合目标板FLASH数据手册,进行适当修改;
④ 串口驱动,如修改cpu/mpc8xx/serial.c串口收发器芯片使能部分。
3. U-boot移植的要点:
-
U-Boot移植参考板。这是进行U-Boot移植首先要明确的。可以根据目标板上CPU、FLASH、SDRAM的情况,以尽可能相一致为原则,先找出一个与所移植目标板为同一个或同一系列处理器的U-Boot支持板为移植参考板。如Alinx AX7021板可选择U-Boot源码中Xilinx zc706板作为U-Boot移植参考板。对U-Boot移植新手,建议依照循序渐进的原则,目标板文件名暂时先用移植参考板的名称,在逐步熟悉U-Boot移植基础上,再考虑给目标板重新命名。在实际移植过程中,可用Linux命令查找移植参考板的特定代码,如 grep –r zc706 ./ 可确定出在U-Boot中与zc706板有关的代码,依此对照目标板实际进行屏蔽或修改。同时应不局限于移植参考板中的代码,要广泛借鉴U-Boot 中已有的代码更好地实现一些具体的功能
-
U-Boot烧写地址。不同目标板,对U-Boot在FLASH中存放地址要求不尽相同。事实上,这是由处理器中断复位向量来决定的,与主板硬件相关。也就是说,U-Boot烧写具体位置是由硬件决定的,而不是程序设计来选择的。程序中相应 U-Boot起始地址必须与硬件所确定的硬件复位向量相吻合。因此, U-Boot 的BIN镜像文件必须烧写到FLASH的起始位置。事实上,大多数的PPC系列的处理器中断复位向量是0x00000100和0xfff00100。这也是一般所说的高位启动和低位启动的BOOT LOADER所在位置。可通过修改U-Boot源码<目标板>.h头文件中CFG_MONITOR_BASE 和board/<目标板>/config.mk中的TEXT_BASE的设置来与硬件配置相对应。
-
CPU寄存器参数设置。根据处理器系列、类型不同,寄存器名称与作用有一定差别。必须根据目标板的实际,进行合理配置。一个较为可行和有效的方法,就是借鉴参考移植板的配置,再根据目标板实际,进行合理修改。这是一个较费功夫和考验耐力的过程,需要仔细对照处理器各寄存器定义、参考设置、目标板实际作出选择并不断测试。
-
串口调试。能从串口输出信息,即使是乱码,也可以说U-Boot移植取得了实质性突破串口是否有输出,除了与串口驱动相关外,还与 FLASH相关的寄存器设置有关。因为U-Boot是从FLASH中被引导启动的,如果FLASH设置不正确,U-Boot代码读取和执行就会出现一些问题。因此,还需要就FLASH的相关寄存器设置进行一些参数调试。同时,要注意串口收发芯片相关引脚工作波形。依据笔者调试情况,如果串口无输出或出现乱码,一种可能就是该芯片损坏或工作不正常。
-
与启动 FLASH相关的寄存器BR0、OR0的参数设置。应根据目标板FLASH的数据手册与BR0和OR0的相关位含义进行合理设置。这不仅关系到FLASH能否正常工作,而且与串口调试有直接的关联。
-
关于CPLD电路。目标板上是否有CPLD电路丝毫不会影响U-Boot的移植与嵌入式操作系统的正常运行。事实上,CPLD电路是一个集中将板上电路的一些逻辑关系可编程设置的一种实现方法。其本身所起的作用就是实现一些目标板所需的脉冲信号和电路逻辑,其功能完全可以用一些逻辑电路与CPU口线来实现。
-
SDRAM的驱动。串口能输出以后,U-Boot移植是否顺利基本取决于SDRAM的驱动是否正确。与串口调试相比,这部分工作更为核心,难度更大。 一般目标板SDRAM驱动涉及三部分。一是相关寄存器的设置;二是UPM表;三是SDRAM上电初始化过程。任何一部分有问题,都会影响U- Boot、嵌入式操作系统甚至应用程序的稳定、可靠运行。所以说,SDRAM的驱动不仅关系到U-Boot本身能否正常运行,而且还与后续部分相关,是相当关键的部分。
-
补充功能的添加。在获得一个能工作的U-Boot后,就可以根据目标板和实际开发需要,添加一些其它功能支持。如以太网、LCD、NVRAM等。与串口和 SDRAM调试相比,在已有基础之上,这些功能添加还是较为容易的。大多只是在参考现有源码的基础上,进行一些修改和配置。
另外,如果在自主设计的主板上移植U-Boot,那么除了考虑上述软件因素以外,还需要排查目标板硬件可能存在的问题。如原理设计、PCB布线、元件好坏。在移植过程中,敏锐判断出故障态是硬件还是软件问题,往往是关系到项目进度甚至移植成败的关键,相应难度会增加许多。
4. U_Boot具体的移植方法:
参考来源
1、指定交叉编译工具链
顶层目录Makefile中,修改CROSS_COMPILE变量
2、拷贝和本开发板类似的单板配置文件
cp configs/aaa_defconfig configs/bbb_defconfig
3、拷贝配置头文件
cp include/configs/aaa.h include/config/bbb.h
4、拷贝单板目录
cp board/厂家/单板名字aaa board/厂家/单板名字bbb
修改 board/厂家/单板名字bbb/Kconfig文件,包括指定板子类型,SOC类型等
5、SOC添加支持本单板
修改 arch/arm/soc名字/Kconfig
添加本单板型号
例如,在arch/arm/mach-zynq/Kconfig中有以下选项
....
config SYS_CONFIG_NAME
string "Board configuration name"
default "zynq-common"
help
This option contains information about board configuration name.
Based on this option include/configs/<CONFIG_SYS_CONFIG_NAME>.h header
will be used for board configuration.
....
通过配置开发板的信息,可以让系统找到具体开发板对应的头文件。
6、编译
make diskclean
make xxx_config
make
目标文件:顶层目录下的u-boot.bin
5. U-Boot编译运行
5.1 U-Boot源码下载
#较慢
git clone https://github.com/u-boot/u-boot.git
#加速下载
git clone https://hub.fastgit.org/u-boot/u-boot.git
#下载交叉编译工具链(host:Ubuntu 18.04)
sudo apt-get install gcc-arm-linux-gnueabihf
5.2 编译
#配置编译环境
export ARCH=arm
export CROSS_COMPILE=arm-linux-gnueabihf-
#开始编译
make distclean #(清除旧的配置以及已编译出的东西)
make vexpress_ca9x4_defconfig V=1 #(V=1 表示make时显示详细信息)
make
5.3 Qemu模拟运行
#安装qemu
sudo apt-get install qemu
#qemu模拟运行U-boot
qemu-system-arm -M vexpress-a9 -kernel ./u-boot -nographic -m 128M -append "console=ttyAMA0"