- MATLAB基础学习相关知识
没有不重的名么
matlab学习数据结构
MATLAB安装参考:抖音-记录美好生活MATLAB基础知识学习参考:【1小时Matlab速成教程-哔哩哔哩】https://b23.tv/CnvHtO3第1部分:变量定义和基本运算生成矩阵:%生成矩阵%直接法%,表示行;表示列a=[1,2,3;4,5,6;7,8,9];%冒号一维矩阵a=开始:步长:结束,步长为1可省略b=1:1:10;%1,2,...10b=1:10;%与上一个等价%函数生成%
- 解析Python网络爬虫:核心技术、Scrapy框架、分布式爬虫(选择题、填空题、判断题)(第1、2、3、4、5、6、7、10、11章)
一口酪
python爬虫scrapy
第一章【填空题】网络爬虫又称网页蜘蛛或(网络机器人)网络爬虫能够按照一定的(规则),自动请求万维网站并提取网络数据。根据使用场景的不同,网络爬虫可分为(通用爬虫)和(聚焦爬虫)两种。爬虫可以爬取互联网上(公开)且可以访问到的网页信息。【判断题】爬虫是手动请求万维网网站且提取网页数据的程序。×爬虫爬取的是网站后台的数据。×通用爬虫用于将互联网上的网页下载到本地,形成一个互联网内容的镜像备份。√聚焦爬
- 2024年国内人工智能大模型汇总
kiiy2
人工智能ai学习
文心一言文心一言(ERNIEBot)是百度基于文心大模型技术推出的生成式对话产品,将于2023年3月完成内测并面向公众开放。该产品是百度在人工智能领域深耕十余年后,拥有产业级知识增强文心大模型ERNIE的基础上,利用跨模态、跨语言的深度语义理解与生成能力而开发的一款AI聊天机器人。它被设计用于回答用户的问题和提供信息,以帮助人们解决问题和获取知识。此外,文心一言还可以通过学习和训练,不断提高自己的
- 关于DOCX XML
伊一线天
笔记xml存储officelinux百度微软
今天,在linux下发现我的docx文件图标为归档。也就是它是一个被压缩或者被整理的包。我打开之后真的使得,它里面有几个文件夹。文件的存储都是以XML文件保存,当然还有一些媒体文件如图片。后来我到网上搜索了一下这就这之前被炒的火热的OfficeOpenXML。我们可以再http://msdn2.microsoft.com/zh-cn/magazine/cc163526.aspx上看到详细的解释。d
- Python发展史
zougangx
Pythonpython语言java.netbyteunix
Python的创始人为GuidovanRossum。1989年圣诞节期间,在阿姆斯特丹,Guido为了打发圣诞节的无趣,决心开发一个新的脚本解释程序,做为ABC语言的一种继承。之所以选中Python(大蟒蛇的意思)作为程序的名字,是因为他是一个MontyPython的飞行马戏团的爱好者。ABC是由Guido参加设计的一种教学语言。就Guido本人看来,ABC这种语言非常优美和强大,是专门为非专业程
- Python 发展历史
weixin_30371875
1.Python发展历史起源Python的作者,GuidovonRossum,荷兰人。1982年,Guido从阿姆斯特丹大学获得了数学和计算机硕士学位。然而,尽管他算得上是一位数学家,但他更加享受计算机带来的乐趣。用他的话说,尽管拥有数学和计算机双料资质,他总趋向于做计算机相关的工作,并热衷于做任何和编程相关的活儿。在那个时候,Guido接触并使用过诸如Pascal、C、Fortran等语言。这些
- Python的发展史
kxsm_xz
python开发语言
Python之父,荷兰人GuidovanRossum。他于1982年从阿姆斯特丹大学取得了数学和计算机硕士学位。20世纪80年代中期,Python之父GuidovanRossum还在CWI(数学和理论计算机科学领域的研究中心,位于阿姆斯特丹)为ABC语言贡献代码。ABC语言是一个为编程初学者打造的研究项目。ABC语言给了Python之父Guido很大影响,Python从ABC语言中继承了很多东西:
- python语言发展历史
fengjusr
Python是一种面向对象、直译式计算机程序设计语言,由荷兰人GuidovanRossum发明于1989年,1991年发行第一个公开发行版。它常被昵称为胶水语言,它能够很轻松的把用其他语言制作的各种模块(尤其是C/C++)轻松地联结在一起。Python的创始人为GuidovanRossum。1989年圣诞节期间,在阿姆斯特丹,Guido为了打发圣诞节的无趣,决心开发一个新的脚本解释程序,做为ABC
- 创建maven子工程报错:invalid project description
梅子专栏
errormaveneclipseinvalid创建工程失败
错误发生场景:已经创建了一个maven父工程shop_parent01,工程创建时的路径C:\Users\rose\workspace_maven01。然后创建maven工程shop_common继承shop_parent01时报错。报错信息:Invalidprojectdescription.OKC:\Users\rose\workspace_maven01overlapstheworkspac
- 【matlab】采用傅立叶变换空间载波法从强度分布恢复相位分布
鱼弦
人工智能时代matlab开发语言
采用傅立叶变换空间载波法从强度分布恢复相位分布介绍傅立叶变换空间载波法是一种从强度分布恢复相位分布的技术,广泛应用于光学测量、干涉测量、表面形貌测量等领域。该方法通过分析空间上呈正弦分布的光强信息,利用傅立叶变换提取相位信息,从而恢复波面的相位分布。应用使用场景光学测量:用于测量光学元件的表面形貌和波前误差。干涉测量:用于干涉仪中的相位恢复和表面形貌测量。生物医学成像:用于相位对比显微镜中的相位恢
- 【MATLAB例程】虚拟长基线校正INS,代码实现
MATLAB卡尔曼
matlab开发语言
实现水下航行器(AUV)的惯性导航(SINS)与虚拟长基线(VLBL)融合校正,抑制导航误差累积。文章目录惯性导航核心算法误差模型改进运行结果:代码代码总结核心功能技术亮点应用场景结果验证扩展建议代码依赖与运行创新点总结惯性导航核心算法采用四元数法进行姿态更新(如搜索结果3所述),解决大角度旋转问题实现速度/位置力学编排(参考搜索结果14的机械编排流程)虚拟长基线校正:模拟4个海底信标的测距数据(
- 腿足机器人之十- SLAM地图如何用于运动控制
shichaog
腿足机器人机器人
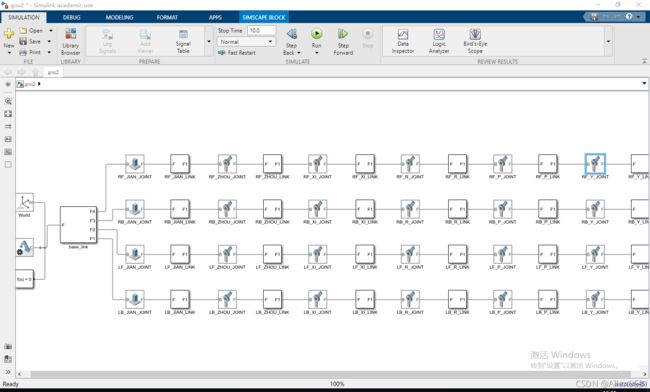
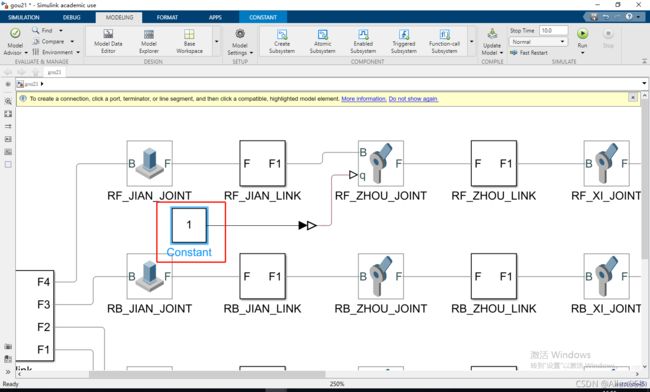
腿足机器人之十-SLAM地图如何用于运动控制腿足机器人SLAM地图的表示与处理全局路径规划:地形感知的路径搜索基于A*的三维路径规划基于RRT*的可行步态序列生成局部运动规划:实时步态调整与避障动态窗口法的腿足适配模型预测控制(MPC)与步态优化稳定性控制与SLAM定位的协同BostonDynamicsAtlas机器人的SLAM导航相比于轮式机器人(如人形轮式机器,可以看成是扫地机器人之上加了一个
- MATLAB图像处理
陈辰学长
图像处理matlab计算机视觉
MATLAB图像处理MATLAB,作为美国MathWorks公司出品的商业数学软件,以其强大的矩阵运算能力和丰富的函数库,在图像处理领域得到了广泛的应用。MATLAB不仅提供了基础的图像处理功能,还通过图像处理工具箱(ImageProcessingToolbox)等高级工具,为用户提供了从图像读取、显示、转换到高级分析和处理的一系列功能。以下将详细介绍MATLAB在图像处理方面的应用。一、MATL
- MATLAB 图像处理:阈值分割检测裂纹和划痕
PixelDyno
图像处理matlab计算机视觉Matlab
MATLAB图像处理:阈值分割检测裂纹和划痕阈值分割是一种常见的图像处理技术,可以将图像分成不同的区域。在裂纹和划痕检测中,阈值分割可以帮助我们将图像中的裂纹和划痕区域分离出来。本文将介绍如何使用MATLAB进行阈值分割裂纹和划痕检测。读入图像首先,我们需要读入一张待处理的图像。可以使用MATLAB的imread函数将图像读入到MATLAB中:img=imread('image.jpg');灰度化
- 8.3:Matlab中数组的基本运算(加减乘除)(课程共5800字,4段代码举例,带详细操作步骤)
小兔子平安
Matlab完整学习全解答matlab算法数据结构
例子1:数组的加法例子2:数组的减法例子3:数组的乘法例子4:数组的除法——例子1:数组的加法在Matlab中,可以使用"+"运算符对数组进行加法运算。如果要将两个数组相加,可以先定义两个数组a和b,然后使用"+"运算符对它们进行加法运算,将结果赋值给数组c。最后使用disp函数将数组c的值输出到屏幕上。a=[123];b=[456];c=a+b;disp(c);目录课程概述(课程共5800字,4
- 6.3:Matlab中二维数组的基本运算(加减乘除)(课程共5300字,4段代码举例,带详细操作步骤)
小兔子平安
Matlab完整学习全解答matlab机器学习开发语言
例子1:逐元素加法运算(Code①)例子2:矩阵乘法运算(Code②)例子3:逐元素除法运算(Code③)例子4:矩阵减法运算(Code④)——例子1:逐元素加法运算(Code①)%代码示例1:逐元素加法运算A=[123;456;789];B=[101112;131415;161718];C=A+B;disp(C);操作步骤:①打开Matlab软件;②创建一个名为A的二维数组,赋值为[123;45
- 基于旭日派的Ros系统小车的再开发——使用python脚本Astra调用深度相机(学习笔记)
Z._ Yang
python嵌入式硬件个人开发python
1、Ros系统的简要介绍:ROS是你的机器人的操作系统。它运行在各种不同类型的计算机上的标准Linux系统之上,如树莓派或其他的一些单片机、以及笔记本电脑或台式电脑。ROS中可执行的程序的基本单位是:节点(node)节点之间通过消息机制进行通信,这就组成了:算图(abac)节点之间通过收发消息进行通信,消息的收发机制分为:话题(topic)、服务(service)和动作(action)1.ROS提
- 25/2/16 <算法笔记> DirectPose
青椒大仙KI11
视觉计算机视觉
DirectPose是一种直接从图像中预测物体的6DoF(位姿:6DegreesofFreedom)姿态的方法,包括平移和平面旋转。它在目标检测、机器人视觉、增强现实(AR)和自动驾驶等领域中具有广泛应用。相比于传统的位姿估计方法,DirectPose试图简化复杂的处理流程,采用端到端的方式直接从图像中输出位姿参数。1.DirectPose是什么?DirectPose是一种端到端的神经网络方法,旨
- matlab整除方式
雅俗共赏100
matlab基础matlab
1.fix(x):截尾取整2.floor(x):不超过x的最大整数3.ceil(x):大于x的最小整数4.round(x):四舍五入取整
- ros基础操作_创建工作空间
小学生的学习笔记
ubuntu
(1)创建工作空间注意:在终端使用命令sudogedit~/.bashrc打开文件添加环境变量,避免每次新开终端重复操作。mkdir-p~/catkin_ws/srccd~/catkin_ws/srccatkin_init_workspacecd~/catkin_ws/catkin_make(2)编译源文件将下载资料src中的三个文件夹复制到/catkin_ws/src路径下再次在工作空间目录下用
- 使用BREEBS平台提升AI知识库
dgay_hua
人工智能python
BREEBS是一个开放的协作知识平台,允许用户基于存储在GoogleDrive文件夹中的PDF文件创建知识胶囊(Breeb)。这些Breebs可供任何大语言模型(LLM)或聊天机器人使用,以提升其专业知识,减少幻觉,并提供访问来源的途径。Breebs背后实现了多种增强生成(RAG)模型,以在每次迭代中无缝提供有用的上下文。技术背景介绍随着自然语言处理(NLP)技术的进步,大语言模型(LLM)在生成
- 马斯克-全球最大算力集群-grok3效果任何
数据分析能量站
机器学习人工智能
就在刚刚,科技界巨头埃隆・马斯克正式揭晓了x.AI旗下的最新力作——Grok3。一经发布,Grok3便凭借其卓越表现,被赞誉为全球范围内最具智慧与力量的人工智能。(有待继续观察)作为x.AI精心打造的新型聊天机器人,Grok3展现出了令人惊叹的推理天赋,面对复杂问题时,能够凭借严密逻辑抽丝剥茧,给出精准解答。不仅如此,它还配备了如DeepSearch(深度搜索)这般的前沿功能,让信息获取与知识挖掘
- Matlab 点云移动最小二乘法(MLS)
大鱼BIGFISH
点云数据处理matlab最小二乘法点云移动最小二乘法(MLS)
文章目录一、简介二、实现代码三、实现效果参考文献一、简介我们要明白MLS是想用一组基函数来局部近似我们的目标函数,它非常类似于我们所学的泰勒公式,只不过它是基于局部的。这里我们以一维的MLS为例,其具体的原理如下所述:假设Ω为范数向量空间,而u为Ω内场变量的标量。为了形成一个近似函数uau^au
- 《计算机组成及汇编语言原理》阅读笔记:p1-p8
编程
《计算机组成及汇编语言原理》学习第1天,p1-p8总结,总计8页。一、技术总结1.Intel8088microprocessor(微处理器),1979-1988。2.MS-DOSMicrosoftDiskOperatingSystem的缩写,是一个操作系统(operatingsystem)。3.Moore'sLaw&Moore'ssecondlaw(1)Moore'slawThenumberoft
- 解决win11下taskmgr放在“启动”文件夹中无法自启动问题
nicekwell
windows的使用windows
https://superuser.com/questions/1647652/why-the-task-manager-automatically-does-not-start-from-the-startup-folder-at-usewindows中设置开机自动启动的常用方法是把要启动的程序或文件的快捷方式放到C:\Users\\AppData\Roaming\Microsoft\Windo
- 一文读懂MUSIC算法DOA估计的数学原理并仿真
迎风打盹儿
阵列信号处理MUSIC算法DOA估计阵列信号处理信号子空间噪声子空间
一文读懂MUSIC算法DOA估计的数学原理并仿真文章目录前言一、DOA估计基本原理二、MATLAB仿真总结前言MUSIC(MultipleSignalClassification)算法于1979年由R.O.Schmidt提出,是阵列信号处理中广泛应用的经典DOA(DirectionofArrival)估计算法,凭借其超分辨的估计性能受到广泛关注。本文将从数学公式推导的角度出发系统阐述MUSIC算法
- 基于MUSIC算法的DOA估计Matlab仿真
fpga和matlab
★MATLAB算法仿真经验板块1:通信与信号处理matlabMUSIC算法DOA估计
up目录一、理论基础二、核心程序三、测试结果一、理论基础阵列信号处理是信号处理领域内的一个重要分支,在近些年来得到了迅速发展。波达方向(DirectionofArrival,DOA)估计是阵列信号处理的一个重要的研究领域,在雷达、通信、声纳、地震学等领域都有着广泛的应用前景。在DOA估计的发展过程中,人们对高分辨DOA估计算法一直有很大的研究兴趣,并在这一领域取得了很多重要的进展。阵列信号处理主要
- “傻瓜”学计量——主成分分析法PCA(原理+实操)
nn坚持学stata+matlab
计量算法机器学习人工智能学习笔记学习方法经验分享
提纲:1.PCA原理2.视频推荐:PCA原理spass操作stata操作+matlab实操1.背景在一些领域中,需要对大量数据进行观测。但是可能会带来变量之间具有相关性、分别对每个指标分析带来的偏误等问题。因此,要寻找一个合理的方法,在减少需要分析的直白的同时,尽量减少原指标包含的信息缺失。通常做法是对有关联性的变量进行合并,这样就可以用较少的综合指标分别代表存在于各个变量中的各类信息。常用的方法
- 【人工智能时代】- AI 聚合平台
xiaoli8748_软件开发
人工智能时代人工智能
最近听朋友介绍,国内有个团队开发了一个全功能的AI聚合平台,包含主流的GPT和绘画功能,以及一些其他的衍生功能,几乎应有尽有。于是,对AI很感兴趣的我,便也来瞧瞧这是个什么样的存在,以下便是我的真实使用感受。除此以外,作为一个程序员,我还使用了该平台提供的API接口,开发了一个简单的小程序。文章的末尾,我将提供免费的AI机器人,以及小程序体验地址,记得查收哦~官方网站:https://302.ai
- ROS turtlesim 无法通过 键盘控制 turtle 移动
狗头鹰
ubuntulinux
原因:当我们在singlemachine上进行试验时,如果出现了上述问题,除了指令输入错误、本地没该功能包,未选中turtle_teleop_key终端进行操作等简单原因外,还有可能是未正确设置环境变量ROS_MASTER_URI,ROS_HOSTNAMEsolutions:vim~/.basrhc打开文件.bashrc,在文件末尾加上exportROS_HOSTNAME=ubuntu.local
- 开发者关心的那些事
圣子足道
ios游戏编程apple支付
我要在app里添加IAP,必须要注册自己的产品标识符(product identifiers)。产品标识符是什么?
产品标识符(Product Identifiers)是一串字符串,它用来识别你在应用内贩卖的每件商品。App Store用产品标识符来检索产品信息,标识符只能包含大小写字母(A-Z)、数字(0-9)、下划线(-)、以及圆点(.)。你可以任意排列这些元素,但我们建议你创建标识符时使用
- 负载均衡器技术Nginx和F5的优缺点对比
bijian1013
nginxF5
对于数据流量过大的网络中,往往单一设备无法承担,需要多台设备进行数据分流,而负载均衡器就是用来将数据分流到多台设备的一个转发器。
目前有许多不同的负载均衡技术用以满足不同的应用需求,如软/硬件负载均衡、本地/全局负载均衡、更高
- LeetCode[Math] - #9 Palindrome Number
Cwind
javaAlgorithm题解LeetCodeMath
原题链接:#9 Palindrome Number
要求:
判断一个整数是否是回文数,不要使用额外的存储空间
难度:简单
分析:
题目限制不允许使用额外的存储空间应指不允许使用O(n)的内存空间,O(1)的内存用于存储中间结果是可以接受的。于是考虑将该整型数反转,然后与原数字进行比较。
注:没有看到有关负数是否可以是回文数的明确结论,例如
- 画图板的基本实现
15700786134
画图板
要实现画图板的基本功能,除了在qq登陆界面中用到的组件和方法外,还需要添加鼠标监听器,和接口实现。
首先,需要显示一个JFrame界面:
public class DrameFrame extends JFrame { //显示
- linux的ps命令
被触发
linux
Linux中的ps命令是Process Status的缩写。ps命令用来列出系统中当前运行的那些进程。ps命令列出的是当前那些进程的快照,就是执行ps命令的那个时刻的那些进程,如果想要动态的显示进程信息,就可以使用top命令。
要对进程进行监测和控制,首先必须要了解当前进程的情况,也就是需要查看当前进程,而 ps 命令就是最基本同时也是非常强大的进程查看命令。使用该命令可以确定有哪些进程正在运行
- Android 音乐播放器 下一曲 连续跳几首歌
肆无忌惮_
android
最近在写安卓音乐播放器的时候遇到个问题。在MediaPlayer播放结束时会回调
player.setOnCompletionListener(new OnCompletionListener() {
@Override
public void onCompletion(MediaPlayer mp) {
mp.reset();
Log.i("H
- java导出txt文件的例子
知了ing
javaservlet
代码很简单就一个servlet,如下:
package com.eastcom.servlet;
import java.io.BufferedOutputStream;
import java.io.IOException;
import java.net.URLEncoder;
import java.sql.Connection;
import java.sql.Resu
- Scala stack试玩, 提高第三方依赖下载速度
矮蛋蛋
scalasbt
原文地址:
http://segmentfault.com/a/1190000002894524
sbt下载速度实在是惨不忍睹, 需要做些配置优化
下载typesafe离线包, 保存为ivy本地库
wget http://downloads.typesafe.com/typesafe-activator/1.3.4/typesafe-activator-1.3.4.zip
解压r
- phantomjs安装(linux,附带环境变量设置) ,以及casperjs安装。
alleni123
linuxspider
1. 首先从官网
http://phantomjs.org/下载phantomjs压缩包,解压缩到/root/phantomjs文件夹。
2. 安装依赖
sudo yum install fontconfig freetype libfreetype.so.6 libfontconfig.so.1 libstdc++.so.6
3. 配置环境变量
vi /etc/profil
- JAVA IO FileInputStream和FileOutputStream,字节流的打包输出
百合不是茶
java核心思想JAVA IO操作字节流
在程序设计语言中,数据的保存是基本,如果某程序语言不能保存数据那么该语言是不可能存在的,JAVA是当今最流行的面向对象设计语言之一,在保存数据中也有自己独特的一面,字节流和字符流
1,字节流是由字节构成的,字符流是由字符构成的 字节流和字符流都是继承的InputStream和OutPutStream ,java中两种最基本的就是字节流和字符流
类 FileInputStream
- Spring基础实例(依赖注入和控制反转)
bijian1013
spring
前提条件:在http://www.springsource.org/download网站上下载Spring框架,并将spring.jar、log4j-1.2.15.jar、commons-logging.jar加载至工程1.武器接口
package com.bijian.spring.base3;
public interface Weapon {
void kil
- HR看重的十大技能
bijian1013
提升能力HR成长
一个人掌握何种技能取决于他的兴趣、能力和聪明程度,也取决于他所能支配的资源以及制定的事业目标,拥有过硬技能的人有更多的工作机会。但是,由于经济发展前景不确定,掌握对你的事业有所帮助的技能显得尤为重要。以下是最受雇主欢迎的十种技能。 一、解决问题的能力 每天,我们都要在生活和工作中解决一些综合性的问题。那些能够发现问题、解决问题并迅速作出有效决
- 【Thrift一】Thrift编译安装
bit1129
thrift
什么是Thrift
The Apache Thrift software framework, for scalable cross-language services development, combines a software stack with a code generation engine to build services that work efficiently and s
- 【Avro三】Hadoop MapReduce读写Avro文件
bit1129
mapreduce
Avro是Doug Cutting(此人绝对是神一般的存在)牵头开发的。 开发之初就是围绕着完善Hadoop生态系统的数据处理而开展的(使用Avro作为Hadoop MapReduce需要处理数据序列化和反序列化的场景),因此Hadoop MapReduce集成Avro也就是自然而然的事情。
这个例子是一个简单的Hadoop MapReduce读取Avro格式的源文件进行计数统计,然后将计算结果
- nginx定制500,502,503,504页面
ronin47
nginx 错误显示
server {
listen 80;
error_page 500/500.html;
error_page 502/502.html;
error_page 503/503.html;
error_page 504/504.html;
location /test {return502;}}
配置很简单,和配
- java-1.二叉查找树转为双向链表
bylijinnan
二叉查找树
import java.util.ArrayList;
import java.util.List;
public class BSTreeToLinkedList {
/*
把二元查找树转变成排序的双向链表
题目:
输入一棵二元查找树,将该二元查找树转换成一个排序的双向链表。
要求不能创建任何新的结点,只调整指针的指向。
10
/ \
6 14
/ \
- Netty源码学习-HTTP-tunnel
bylijinnan
javanetty
Netty关于HTTP tunnel的说明:
http://docs.jboss.org/netty/3.2/api/org/jboss/netty/channel/socket/http/package-summary.html#package_description
这个说明有点太简略了
一个完整的例子在这里:
https://github.com/bylijinnan
- JSONUtil.serialize(map)和JSON.toJSONString(map)的区别
coder_xpf
jqueryjsonmapval()
JSONUtil.serialize(map)和JSON.toJSONString(map)的区别
数据库查询出来的map有一个字段为空
通过System.out.println()输出 JSONUtil.serialize(map): {"one":"1","two":"nul
- Hibernate缓存总结
cuishikuan
开源sshjavawebhibernate缓存三大框架
一、为什么要用Hibernate缓存?
Hibernate是一个持久层框架,经常访问物理数据库。
为了降低应用程序对物理数据源访问的频次,从而提高应用程序的运行性能。
缓存内的数据是对物理数据源中的数据的复制,应用程序在运行时从缓存读写数据,在特定的时刻或事件会同步缓存和物理数据源的数据。
二、Hibernate缓存原理是怎样的?
Hibernate缓存包括两大类:Hib
- CentOs6
dalan_123
centos
首先su - 切换到root下面1、首先要先安装GCC GCC-C++ Openssl等以来模块:yum -y install make gcc gcc-c++ kernel-devel m4 ncurses-devel openssl-devel2、再安装ncurses模块yum -y install ncurses-develyum install ncurses-devel3、下载Erang
- 10款用 jquery 实现滚动条至页面底端自动加载数据效果
dcj3sjt126com
JavaScript
无限滚动自动翻页可以说是web2.0时代的一项堪称伟大的技术,它让我们在浏览页面的时候只需要把滚动条拉到网页底部就能自动显示下一页的结果,改变了一直以来只能通过点击下一页来翻页这种常规做法。
无限滚动自动翻页技术的鼻祖是微博的先驱:推特(twitter),后来必应图片搜索、谷歌图片搜索、google reader、箱包批发网等纷纷抄袭了这一项技术,于是靠滚动浏览器滚动条
- ImageButton去边框&Button或者ImageButton的背景透明
dcj3sjt126com
imagebutton
在ImageButton中载入图片后,很多人会觉得有图片周围的白边会影响到美观,其实解决这个问题有两种方法
一种方法是将ImageButton的背景改为所需要的图片。如:android:background="@drawable/XXX"
第二种方法就是将ImageButton背景改为透明,这个方法更常用
在XML里;
<ImageBut
- JSP之c:foreach
eksliang
jspforearch
原文出自:http://www.cnblogs.com/draem0507/archive/2012/09/24/2699745.html
<c:forEach>标签用于通用数据循环,它有以下属性 属 性 描 述 是否必须 缺省值 items 进行循环的项目 否 无 begin 开始条件 否 0 end 结束条件 否 集合中的最后一个项目 step 步长 否 1
- Android实现主动连接蓝牙耳机
gqdy365
android
在Android程序中可以实现自动扫描蓝牙、配对蓝牙、建立数据通道。蓝牙分不同类型,这篇文字只讨论如何与蓝牙耳机连接。
大致可以分三步:
一、扫描蓝牙设备:
1、注册并监听广播:
BluetoothAdapter.ACTION_DISCOVERY_STARTED
BluetoothDevice.ACTION_FOUND
BluetoothAdapter.ACTION_DIS
- android学习轨迹之四:org.json.JSONException: No value for
hyz301
json
org.json.JSONException: No value for items
在JSON解析中会遇到一种错误,很常见的错误
06-21 12:19:08.714 2098-2127/com.jikexueyuan.secret I/System.out﹕ Result:{"status":1,"page":1,&
- 干货分享:从零开始学编程 系列汇总
justjavac
编程
程序员总爱重新发明轮子,于是做了要给轮子汇总。
从零开始写个编译器吧系列 (知乎专栏)
从零开始写一个简单的操作系统 (伯乐在线)
从零开始写JavaScript框架 (图灵社区)
从零开始写jQuery框架 (蓝色理想 )
从零开始nodejs系列文章 (粉丝日志)
从零开始编写网络游戏
- jquery-autocomplete 使用手册
macroli
jqueryAjax脚本
jquery-autocomplete学习
一、用前必备
官方网站:http://bassistance.de/jquery-plugins/jquery-plugin-autocomplete/
当前版本:1.1
需要JQuery版本:1.2.6
二、使用
<script src="./jquery-1.3.2.js" type="text/ja
- PLSQL-Developer或者Navicat等工具连接远程oracle数据库的详细配置以及数据库编码的修改
超声波
oracleplsql
在服务器上将Oracle安装好之后接下来要做的就是通过本地机器来远程连接服务器端的oracle数据库,常用的客户端连接工具就是PLSQL-Developer或者Navicat这些工具了。刚开始也是各种报错,什么TNS:no listener;TNS:lost connection;TNS:target hosts...花了一天的时间终于让PLSQL-Developer和Navicat等这些客户
- 数据仓库数据模型之:极限存储--历史拉链表
superlxw1234
极限存储数据仓库数据模型拉链历史表
在数据仓库的数据模型设计过程中,经常会遇到这样的需求:
1. 数据量比较大; 2. 表中的部分字段会被update,如用户的地址,产品的描述信息,订单的状态等等; 3. 需要查看某一个时间点或者时间段的历史快照信息,比如,查看某一个订单在历史某一个时间点的状态, 比如,查看某一个用户在过去某一段时间内,更新过几次等等; 4. 变化的比例和频率不是很大,比如,总共有10
- 10点睛Spring MVC4.1-全局异常处理
wiselyman
spring mvc
10.1 全局异常处理
使用@ControllerAdvice注解来实现全局异常处理;
使用@ControllerAdvice的属性缩小处理范围
10.2 演示
演示控制器
package com.wisely.web;
import org.springframework.stereotype.Controller;
import org.spring