优化问题-LP,QP和QCQP(线性规划,Linear Programming; 二次规划,Quadratic Programming;二次约束二次规划)
文章目录
- 线性规划(LP)
-
- LP的一些例子:
-
- Chebyshev中心
- ℓ ∞ \ell_{\infty} ℓ∞-norm 近似问题:
- ℓ 1 \ell_{1} ℓ1-norm 近似问题:
- 二次规划(QP)
-
- QP的例子:
-
- 有界约束最小二乘问题
- 多面体的距离
- 二次约束二次规划(QCQP)
- QP和QCQP在beamforming设计中的应用
-
- 接收波束成形:平均旁瓣能量最小化
- 接收波束成形:最大旁瓣能量最小化
- QCQP在认知无线电(cognitive radio)发射beamforming的应用
线性规划(LP)
LP问题的一般形式为:
min c T x s.t. G x ⪯ h ( 6.1 ) \begin{array}{ll} \min & \mathbf{c}^{T} \mathbf{x} \\ \text { s.t. } & \mathbf{G x} \preceq \mathbf{h} \end{array}(6.1) min s.t. cTxGx⪯h(6.1)
本质:LP问题即是在多面体上找到一个可行解使得线性目标函数最小。
LP的一般形式可以转化为标准形式,即引入松弛变量:
s ≜ h − G x \mathbf{s} \triangleq \mathbf{h}-\mathbf{G} \mathbf{x} s≜h−Gx
作为助变量。则(6.1)可以表示为:
min c T x s.t. s ⪰ 0 , h − G x = s ( 6.2 ) \begin{array}{ll} \min & \mathbf{c}^{T} \mathbf{x} \\ \text { s.t. } & \mathbf{s} \succeq \mathbf{0}, \mathbf{h}-\mathbf{G} \mathbf{x}=\mathbf{s} \end{array}(6.2) min s.t. cTxs⪰0,h−Gx=s(6.2)
进一步: x = x + − x − \mathrm{x}=\mathrm{x}_{+}-\mathrm{x}_{-} x=x+−x−,其中 x + , x − ⪰ 0 \mathrm{x}_{+}, \mathrm{x}_{-} \succeq 0 x+,x−⪰0,则(6.2)可以等价为:
min [ c T − c T 0 T ] [ x + x − s ] s.t. [ x + x − s ] ⪰ 0 , [ G − G I ] [ x + x − s ] = h ( 6.3 ) \begin{array}{ll} \min & \left[\begin{array}{lll} \mathbf{c}^{T} & -\mathbf{c}^{T} & 0^{T} \end{array}\right]\left[\begin{array}{c} \mathbf{x}_{+} \\ \mathbf{x}_{-} \\ \mathbf{s} \end{array}\right] \\ \text { s.t. } & \left[\begin{array}{c} \mathrm{x}_{+} \\ \mathrm{x}_{-} \\ \mathrm{s} \end{array}\right] \succeq 0, \quad\left[\begin{array}{lll} \mathbf{G} & -\mathbf{G} & \mathbf{I} \end{array}\right]\left[\begin{array}{c} \mathrm{x}_{+} \\ \mathrm{x}_{-} \\ \mathrm{s} \end{array}\right]=\mathrm{h} \end{array}(6.3) min s.t. [cT−cT0T]⎣⎡x+x−s⎦⎤⎣⎡x+x−s⎦⎤⪰0,[G−GI]⎣⎡x+x−s⎦⎤=h(6.3)
(6.3)可以重新表示为标准LP形式:
min c T x s.t. x ⪰ 0 , A x = b \begin{array}{ll} \min & \boldsymbol{c}^{T} \boldsymbol{x} \\ \text { s.t. } & \boldsymbol{x} \succeq \mathbf{0}, \boldsymbol{A} \boldsymbol{x}=\boldsymbol{b} \end{array} min s.t. cTxx⪰0,Ax=b
其中
A = [ G − G I ] , c = [ c T − c T 0 T ] T , x = [ x + T x − T s T ] T \boldsymbol{A}=\left[\begin{array}{lll} \mathbf{G} & -\mathbf{G} & \mathbf{I} \end{array}\right], \quad c=\left[\mathbf{c}^{T}-\mathbf{c}^{T} \mathbf{0}^{T}\right]^{T}, \quad x=\left[\mathbf{x}_{+}^{T} \mathbf{x}_{-}^{T} \mathbf{s}^{T}\right]^{T} A=[G−GI],c=[cT−cT0T]T,x=[x+Tx−TsT]T
其中 x \boldsymbol{x} x是未知变量。
LP的一些例子:
Chebyshev中心
考虑欧式球 B ( x c , r ) = { x ∣ ∥ x − x c ∥ 2 ≤ r } B\left(\mathbf{x}_{c}, r\right)=\left\{\mathbf{x} \mid\left\|\mathbf{x}-\mathbf{x}_{c}\right\|_{2} \leq r\right\} B(xc,r)={x∣∥x−xc∥2≤r}以及多面体 P = { x ∣ a i T x ≤ b i , i = 1 , … , m } \mathcal{P}=\{\mathbf{x} \mid\left.\mathbf{a}_{i}^{T} \mathbf{x} \leq b_{i}, i=1, \ldots, m\right\} P={x∣aiTx≤bi,i=1,…,m}
Chebyshev问题描述为,在多面体 P \mathcal{P} P中找到最大的欧式球,如下图所示。该问题表示为:

max x c , r r s.t. B ( x c , r ) ⊆ P = { x ∣ a i T x ≤ b i , i = 1 , … , m } ( 6.6 ) \begin{array}{rl} \max _{\mathbf{x}_{c}, r} & r \\ \text { s.t. } & B\left(\mathbf{x}_{c}, r\right) \subseteq \mathcal{P}=\left\{\mathbf{x} \mid \mathbf{a}_{i}^{T} \mathbf{x} \leq b_{i}, i=1, \ldots, m\right\} \end{array}(6.6) maxxc,r s.t. rB(xc,r)⊆P={x∣aiTx≤bi,i=1,…,m}(6.6)
该问题看起来是非凸的,但可以转化为LP。考虑欧式球的另一种定义:
B ( x c , r ) = { x c + u ∣ ∥ u ∥ 2 ≤ r } B\left(\mathbf{x}_{c}, r\right)=\left\{\mathbf{x}_{c}+\mathbf{u} \mid\|\mathbf{u}\|_{2} \leq r\right\} B(xc,r)={xc+u∣∥u∥2≤r}
考虑Cauchy-Schwartz inequality:有:
a i T u ≤ ∥ a i ∥ 2 ⋅ ∥ u ∥ 2 \mathbf{a}_{i}^{T} \mathbf{u} \leq\left\|\mathbf{a}_{i}\right\|_{2} \cdot\|\mathbf{u}\|_{2} aiTu≤∥ai∥2⋅∥u∥2
考虑(6.6)的约束集可以重新表示为:
B ( x c , r ) ⊆ P ⟺ sup { a i T ( x c + u ) ∣ ∥ u ∥ 2 ≤ r } ≤ b i , ∀ i ⟺ a i T x c + r ∥ a i ∥ 2 ≤ b i , ∀ i (i.e., u = r a i ∥ a i ∥ 2 ) , \begin{aligned} B\left(\mathrm{x}_{c}, r\right) \subseteq \mathcal{P} & \Longleftrightarrow \sup \left\{\mathbf{a}_{i}^{T}\left(\mathrm{x}_{c}+\mathbf{u}\right) \mid\|\mathbf{u}\|_{2} \leq r\right\} \leq b_{i}, \quad \forall i \\ &\left.\Longleftrightarrow \mathbf{a}_{i}^{T} \mathbf{x}_{c}+r\left\|\mathbf{a}_{i}\right\|_{2} \leq b_{i}, \forall i \quad \text { (i.e., } \mathbf{u}=r \frac{\mathbf{a}_{i}}{\left\|\mathbf{a}_{i}\right\|_{2}}\right), \end{aligned} B(xc,r)⊆P⟺sup{aiT(xc+u)∣∥u∥2≤r}≤bi,∀i⟺aiTxc+r∥ai∥2≤bi,∀i (i.e., u=r∥ai∥2ai),
因此Chebyshev 中心问题可以表示为:
max x c , r r s.t. a i T x c + r ∥ a i ∥ 2 ≤ b i , i = 1 , … , m . \begin{array}{rl} \max _{\mathbf{x}_{c}, r} & r \\ \text { s.t. } & \mathbf{a}_{i}^{T} \mathbf{x}_{c}+r\left\|\mathbf{a}_{i}\right\|_{2} \leq b_{i}, i=1, \ldots, m . \end{array} maxxc,r s.t. raiTxc+r∥ai∥2≤bi,i=1,…,m.
ℓ ∞ \ell_{\infty} ℓ∞-norm 近似问题:
ℓ ∞ \ell_{\infty} ℓ∞-norm 定义为:
min ∥ A x − b ∥ ∞ \min \|\mathrm{Ax}-\mathrm{b}\|_{\infty} min∥Ax−b∥∞
其中: A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n和 b ∈ R m \mathbf{b} \in \mathbb{R}^{m} b∈Rm。利用epigraph形式有:
min t s.t. max i = 1 , … , m ∣ r i ∣ ≤ t r = A x − b \begin{aligned} &\min t\\ &\begin{array}{l} \text { s.t. } \max _{i=1, \ldots, m}\left|r_{i}\right| \leq t \\ \quad \mathbf{r}=\mathbf{A x}-\mathbf{b} \end{array} \end{aligned} mint s.t. maxi=1,…,m∣ri∣≤tr=Ax−b
进一步有:
min t s.t. − t 1 m ⪯ r ⪯ t 1 m r = A x − b \begin{array}{l} \min t \\ \text { s.t. }-t 1_{m} \preceq \mathbf{r} \preceq t \mathbf{1}_{m} \\ \quad \mathbf{r}=\mathbf{A} \mathbf{x}-\mathbf{b} \end{array} mint s.t. −t1m⪯r⪯t1mr=Ax−b
这是一个LP问题, r \mathbf{r} r是新定义的辅助变量。 x \mathbf{x} x、 r \mathbf{r} r和 t t t均为未知变量。
ℓ 1 \ell_{1} ℓ1-norm 近似问题:
min ∥ A x − b ∥ 1 \min \|\mathbf{A x}-\mathbf{b}\|_{1} min∥Ax−b∥1
其中: A ∈ R m × n \mathbf{A} \in \mathbb{R}^{m \times n} A∈Rm×n和 b ∈ R m \mathbf{b} \in \mathbb{R}^{m} b∈Rm。同样可以转化为LP问题:
min ∑ i = 1 m ∣ r i ∣ s.t. r = A x − b \begin{array}{l} \min \sum_{i=1}^{m}\left|r_{i}\right| \\ \text { s.t. } \mathbf{r}=\mathbf{A} \mathbf{x}-\mathbf{b} \end{array} min∑i=1m∣ri∣ s.t. r=Ax−b
进一步有:
min ∑ i = 1 m t i s.t. − t i ≤ r i ≤ t i , i = 1 , … , m r = A x − b \begin{aligned} \min & \sum_{i=1}^{m} t_{i} \\ \text { s.t. } &-t_{i} \leq r_{i} \leq t_{i}, i=1, \ldots, m \\ & \mathbf{r}=\mathbf{A x}-\mathbf{b} \end{aligned} min s.t. i=1∑mti−ti≤ri≤ti,i=1,…,mr=Ax−b
这是一个LP问题, r \mathbf{r} r是新定义的辅助变量。 x \mathbf{x} x、 r \mathbf{r} r和 t i t_i ti, i = 1 , . . . , m i=1,...,m i=1,...,m 均为未知变量。
二次规划(QP)
二次规划形式如下:
min 1 2 x T P x + q T x + r s.t. A x = b , G x ⪯ h \begin{aligned} \min & \frac{1}{2} \mathbf{x}^{T} \mathbf{P} \mathbf{x}+\mathbf{q}^{T} \mathbf{x}+r \\ \text { s.t. }& \mathbf{A} \mathbf{x}=\mathbf{b}, \mathbf{G} \mathbf{x} \preceq \mathbf{h} \end{aligned} min s.t. 21xTPx+qTx+rAx=b,Gx⪯h
其中 P ∈ S n \mathbf{P} \in \mathbb{S}^{n} P∈Sn, G ∈ R m × n \mathbf{G} \in \mathbb{R}^{m \times n} G∈Rm×n和 A ∈ R p × n \mathbf{A} \in \mathbb{R}^{p \times n} A∈Rp×n。当且仅当 P ⪰ 0 \mathbf{P} \succeq \mathbf{0} P⪰0时QP问题是凸问题
本质:QP问题即是在多面体上找到一个可行解使得二次目标函数最小。
QP的例子:
有界约束最小二乘问题
min ∥ A x − b ∥ 2 2 s.t. ℓ ⪯ x ⪯ u \begin{array}{c} \min \|\mathbf{A} \mathbf{x}-\mathbf{b}\|_{2}^{2} \\ \text { s.t. } \ell \preceq \mathbf{x} \preceq \mathbf{u} \end{array} min∥Ax−b∥22 s.t. ℓ⪯x⪯u
由于 ∥ A x − b ∥ 2 2 = x T ( A T A ) x − 2 b T A x + b T b \|\mathbf{A} \mathbf{x}-\mathbf{b}\|_{2}^{2}=\mathbf{x}^{T}\left(\mathbf{A}^{T} \mathbf{A}\right) \mathbf{x}-2 \mathbf{b}^{T} \mathbf{A} \mathbf{x}+\mathbf{b}^{T} \mathbf{b} ∥Ax−b∥22=xT(ATA)x−2bTAx+bTb。因此,是一个QP问题。
多面体的距离
min ∥ x 1 − x 2 ∥ 2 2 s.t. A 1 x 1 ⪯ b 1 , A 2 x 2 ⪯ b 2 \begin{aligned} \min &\left\|\mathbf{x}_{1}-\mathbf{x}_{2}\right\|_{2}^{2} \\ \text { s.t. } & \mathbf{A}_{1} \mathbf{x}_{1} \preceq \mathbf{b}_{1}, \mathbf{A}_{2} \mathbf{x}_{2} \preceq \mathbf{b}_{2} \end{aligned} min s.t. ∥x1−x2∥22A1x1⪯b1,A2x2⪯b2
其中, x 1 ∈ R n \mathbf{x}_{1} \in \mathbb{R}^{n} x1∈Rn和 x 2 ∈ R n \mathrm{x}_{2} \in \mathbb{R}^{n} x2∈Rn。令 x = [ x 1 T , x 2 T ] T ∈ R 2 n \mathbf{x}=\left[\mathbf{x}_{1}^{T}, \mathbf{x}_{2}^{T}\right]^{T} \in \mathbb{R}^{2 n} x=[x1T,x2T]T∈R2n,然后有:
min ∥ [ I n , − I n ] x ∥ 2 2 s.t. [ A 1 0 0 A 2 ] x ⪯ [ b 1 b 2 ] \begin{array}{l} \min \left\|\left[\mathbf{I}_{n},-\mathbf{I}_{n}\right] \mathbf{x}\right\|_{2}^{2} \\ \text { s.t. }\left[\begin{array}{cc} \mathbf{A}_{1} & \mathbf{0} \\ \mathbf{0} & \mathbf{A}_{2} \end{array}\right] \mathbf{x} \preceq\left[\begin{array}{l} \mathbf{b}_{1} \\ \mathbf{b}_{2} \end{array}\right] \end{array} min∥[In,−In]x∥22 s.t. [A100A2]x⪯[b1b2]
该问题是一个QP问题,因为 ∥ [ I n , − I n ] x ∥ 2 2 = x T [ I n − I n − I n I n ] x \left\|\left[\mathbf{I}_{n},-\mathbf{I}_{n}\right] \mathbf{x}\right\|_{2}^{2}=\mathbf{x}^{T}\left[\begin{array}{cc} \mathbf{I}_{n} & -\mathbf{I}_{n} \\ -\mathbf{I}_{n} & \mathbf{I}_{n} \end{array}\right] \mathbf{x} ∥[In,−In]x∥22=xT[In−In−InIn]x
二次约束二次规划(QCQP)
一般形式如下:
min 1 2 x T P 0 x + q 0 T x + r 0 s.t. 1 2 x T P i x + q i T x + r i ≤ 0 , i = 1 , … , m A x = b ( 6.108 ) \begin{array}{ll} \min & \frac{1}{2} \mathbf{x}^{T} \mathbf{P}_{0} \mathbf{x}+\mathbf{q}_{0}^{T} \mathbf{x}+r_{0} \\ \text { s.t. } & \frac{1}{2} \mathbf{x}^{T} \mathbf{P}_{i} \mathbf{x}+\mathbf{q}_{i}^{T} \mathbf{x}+r_{i} \leq 0, i=1, \ldots, m \\ & \mathbf{A x}=\mathbf{b} \end{array}(6.108) min s.t. 21xTP0x+q0Tx+r021xTPix+qiTx+ri≤0,i=1,…,mAx=b(6.108)
其中, P i ∈ S n , i = 0 , 1 , … , m \mathbf{P}_{i} \in \mathbb{S}^{n}, i=0,1, \ldots, m Pi∈Sn,i=0,1,…,m和 A ∈ R p × n \mathbf{A} \in \mathbb{R}^{p \times n} A∈Rp×n。
QCQP的一些特殊情况和特点:
- 如果 P i ⪰ 0 \mathbf{P}_{i} \succeq 0 Pi⪰0, ∀ i \forall i ∀i,则QCQP是凸的。
- 当 P i ≻ 0 \mathbf{P}_{i} \succ 0 Pi≻0, i = 1 , . . . , m i=1,...,m i=1,...,m,则QCQP是 m m m个椭球交集上的二次最小化问题,且仿射集为 { x ∣ A x = b } \{\mathbf{x} \mid \mathbf{Ax}=\mathbf{b}\} {x∣Ax=b}
- 如果 P i = 0 \mathbf{P}_{i}=\mathbf{0} Pi=0, i = 1 , . . . , m i=1,...,m i=1,...,m,则QCQP退化为QP。
- 如果 P i = 0 \mathbf{P}_{i}=\mathbf{0} Pi=0, i = 0 , 1 , . . . , m i=0,1,...,m i=0,1,...,m,则QCQP退化为LP。
- 对于 ∀ i = 0 , . . . , m \forall i=0,...,m ∀i=0,...,m,因为
1 2 x T P i x + q i T x + r i = ∥ A i x + b i ∥ 2 2 − ( f i T x + d i ) 2 \frac{1}{2} \mathbf{x}^{T} \mathbf{P}_{i} \mathbf{x}+\mathbf{q}_{i}^{T} \mathbf{x}+r_{i}=\left\|\mathbf{A}_{i} \mathbf{x}+\mathbf{b}_{i}\right\|_{2}^{2}-\left(\mathbf{f}_{i}^{T} \mathbf{x}+d_{i}\right)^{2} 21xTPix+qiTx+ri=∥Aix+bi∥22−(fiTx+di)2
对于问题定义域内的任意 x \mathbf{x} x有 f 0 = 0 n \mathbf{f}_{0}=\mathbf{0}_{n} f0=0n且 f i T x + d i > 0 \mathbf{f}_{i}^{T} \mathbf{x}+d_{i}>0 fiTx+di>0,则(6.108)等价于
min ∥ A 0 x + b 0 ∥ 2 s.t. ∥ A i x + b i ∥ 2 ≤ f i T x + d i , i = 1 , … , m A x = b \begin{aligned} \min &\left\|\mathbf{A}_{0} \mathbf{x}+\mathbf{b}_{0}\right\|_{2} \\ \text { s.t. } &\left\|\mathbf{A}_{i} \mathbf{x}+\mathbf{b}_{i}\right\|_{2} \leq \mathbf{f}_{i}^{T} \mathbf{x}+d_{i}, i=1, \ldots, m \\ & \mathbf{A x}=\mathbf{b} \end{aligned} min s.t. ∥A0x+b0∥2∥Aix+bi∥2≤fiTx+di,i=1,…,mAx=b
或者考虑epigraph形式有:
min t s.t. ∥ A 0 x + b 0 ∥ 2 ≤ t ∥ A i x + b i ∥ 2 ≤ f i T x + d i , i = 1 , … , m A x = b \begin{aligned} \min& \quad t\\ \text { s.t. }&\left\|\mathbf{A}_{0} \mathbf{x}+\mathbf{b}_{0}\right\|_{2} \leq t \\& \left\|\mathbf{A}_{i} \mathrm{x}+\mathbf{b}_{i}\right\|_{2} \leq \mathbf{f}_{i}^{T} \mathbf{x}+d_{i}, i=1, \ldots, m \\& \mathbf{A x}=\mathbf{b} \end{aligned} min s.t. t∥A0x+b0∥2≤t∥Aix+bi∥2≤fiTx+di,i=1,…,mAx=b
这也是一个SOCP(二阶锥规划)问题
QP和QCQP在beamforming设计中的应用
考虑一个简单的ULA模型。
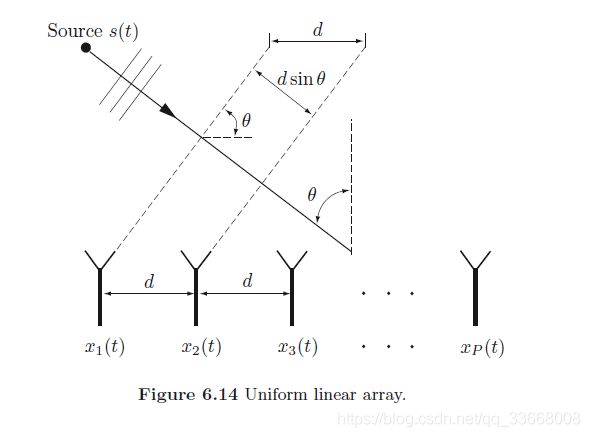
假设DOA(波达方向)是 θ \mathbf{\theta} θ。且接收端配置有 P P P个线性传感器阵列,则有:
y ( t ) = a ( θ ) s ( t ) \mathbf{y}(t)=\mathbf{a}(\theta) s(t) y(t)=a(θ)s(t)
其中导向矢量 a ( θ ) \mathbf{a}(\theta) a(θ)为:
a ( θ ) = [ 1 , e − j 2 π d sin ( θ ) / λ , … , e − j 2 π d ( P − 1 ) sin ( θ ) / λ ] T ∈ C P \mathbf{a}(\theta)=\left[1, e^{-j 2 \pi d \sin (\theta) / \lambda}, \ldots, e^{-j 2 \pi d(P-1) \sin (\theta) / \lambda}\right]^{T} \in \mathbb{C}^{P} a(θ)=[1,e−j2πdsin(θ)/λ,…,e−j2πd(P−1)sin(θ)/λ]T∈CP
λ \lambda λ为波长。 s ( t ) s(t) s(t)为源信号。
源信号的估计值为:
s ^ ( t ) = w H y ( t ) = w H a ( θ ) s ( t ) \hat{s}(t)=\mathbf{w}^{H} \mathbf{y}(t)=\mathbf{w}^{H} \mathbf{a}(\theta) s(t) s^(t)=wHy(t)=wHa(θ)s(t)
其中 w ∈ C P \mathbf{w} \in \mathbb{C}^{P} w∈CP是波束成形权重。令 θ d e s ∈ [ − π / 2 , π / 2 ] \theta_{\mathrm{des}} \in[-\pi / 2, \pi / 2] θdes∈[−π/2,π/2]是期望方向,并假设是完全已知的。一个简单的波束成形可以表示为 w = a ( θ d e s ) \mathbf{w}=\mathbf{a}\left(\theta_{\mathrm{des}}\right) w=a(θdes)。但它对旁瓣的抑制效果很差。(如下图Yoshiki, P = 20 P=20 P=20, d / λ = 0.5 d/\lambda=0.5 d/λ=0.5, θ d e s = 1 0 。 \theta_{\mathrm{des}}=10^。 θdes=10。)

接收波束成形:平均旁瓣能量最小化
令:
Ω = [ − π / 2 , θ ℓ ] ∪ [ θ u , π / 2 ] \boldsymbol{\Omega}=\left[-\pi / 2, \theta_{\ell}\right] \cup\left[\theta_{u}, \pi / 2\right] Ω=[−π/2,θℓ]∪[θu,π/2]
表示旁瓣带。旁瓣能量最小化问题表示为:
min w ∈ C P ∫ Ω ∣ w H a ( θ ) ∣ 2 d θ s.t. w H a ( θ des ) = 1 \begin{aligned} \min _{\mathbf{w} \in \mathbb{C}^{P}} & \int_{\Omega}\left|\mathbf{w}^{H} \mathbf{a}(\theta)\right|^{2} d \theta \\ \text { s.t. } & \mathbf{w}^{H} \mathbf{a}\left(\theta_{\text {des }}\right)=1 \end{aligned} w∈CPmin s.t. ∫Ω∣∣wHa(θ)∣∣2dθwHa(θdes )=1
当 θ = θ d e s \theta=\theta_{\mathrm{des}} θ=θdes时,所涉及的波束成形的输出 s ^ ( t ) \hat{s}(t) s^(t)就是 s ( t ) s(t) s(t),而当 θ ≠ θ des \theta \neq \theta_{\text {des }} θ=θdes 我们尝试最小化 Ω \boldsymbol{\Omega} Ω上的残差总功率,但是源信号估计值与实际值之间仍存在非零残差,该问题等价于一个等式约束的QP问题。
min w ∈ C P { f ( w ) ≜ w H P w } s.t. w H a ( θ des ) = 1 \begin{aligned} \min _{\mathbf{w} \in \mathbb{C}^{P}} &\left\{f(\mathbf{w}) \triangleq \mathbf{w}^{H} \mathbf{P}_{\mathbf{w}}\right\} \\ \text { s.t. } & \mathbf{w}^{H} \mathbf{a}\left(\theta_{\text {des }}\right)=1 \end{aligned} w∈CPmin s.t. {f(w)≜wHPw}wHa(θdes )=1
其中 P = ∫ Ω a ( θ ) a H ( θ ) d θ = P H ⪰ 0 \mathbf{P}=\int_{\Omega} \mathbf{a}(\theta) \mathbf{a}^{H}(\theta) d \theta=\mathbf{P}^{H} \succeq \mathbf{0} P=∫Ωa(θ)aH(θ)dθ=PH⪰0
接收波束成形:最大旁瓣能量最小化
最大旁瓣能量最小化问题表示为
min w ∈ C P max θ ∈ Ω ∣ w H a ( θ ) ∣ 2 s.t. w H a ( θ des ) = 1 \begin{array}{r} \min _{\mathbf{w} \in \mathbb{C}^{P}} \max _{\theta \in \Omega}\left|\mathbf{w}^{H} \mathbf{a}(\theta)\right|^{2} \\ \text { s.t. } \mathbf{w}^{H} \mathbf{a}\left(\theta_{\text {des }}\right)=1 \end{array} minw∈CPmaxθ∈Ω∣∣wHa(θ)∣∣2 s.t. wHa(θdes )=1
考虑epigraph,有:
min w ∈ C P , t ∈ R t s.t. ∣ w H a ( θ ) ∣ 2 ≤ t , ∀ θ ∈ Ω w H a ( θ des ) = 1 \begin{array}{rl} \min _{\mathbf{w} \in \mathbb{C}^{P}, t \in \mathbb{R}} & t \\ \text { s.t. } & \left|\mathbf{w}^{H} \mathbf{a}(\theta)\right|^{2} \leq t, \forall \theta \in \Omega \\ & \mathbf{w}^{H} \mathbf{a}\left(\theta_{\text {des }}\right)=1 \end{array} minw∈CP,t∈R s.t. t∣∣wHa(θ)∣∣2≤t,∀θ∈ΩwHa(θdes )=1
这是无穷多约束下的QCQP,其中的不等式约束可以表示为:
∣ w H a ( θ ) ∣ 2 − t = w H P ( θ ) w − t \left|\mathbf{w}^{H} \mathbf{a}(\theta)\right|^{2}-t=\mathbf{w}^{H} \mathbf{P}(\theta) \mathbf{w}-t ∣∣wHa(θ)∣∣2−t=wHP(θ)w−t
其中 P ( θ ) = a ( θ ) a H ( θ ) ⪰ 0 \mathbf{P}(\theta)=\mathbf{a}(\theta) \mathbf{a}^{H}(\theta) \succeq \mathbf{0} P(θ)=a(θ)aH(θ)⪰0。由于约束项是 w ∈ C P \mathbf{w} \in \mathbb{C}^{P} w∈CP的一个二次凸函数与 t ∈ R t \in \mathbb{R} t∈R的一个线性函数的和,因此在 ( w , t ) (\mathbf{w}, t) (w,t)是凸的,将其表示为标准的QCQP问题
min w , t [ 0 P T 1 ] [ w t ] s.t. [ w H t ] [ P ( θ ) 0 P 0 P T 0 ] [ w t ] + [ 0 P T − 1 ] [ w t ] ≤ 0 , ∀ θ ∈ Ω [ w H t ] [ a ( θ des ) 0 ] = 1 \begin{array}{ll} \min _{\mathbf{w}, t} & {\left[\begin{array}{ll} \mathbf{0}_{P}^{T} & 1 \end{array}\right]\left[\begin{array}{c} \mathbf{w} \\ t \end{array}\right]} \\ \text { s.t. } & {\left[\begin{array}{ll} \mathbf{w}^{H} & t \end{array}\right]\left[\begin{array}{cc} \mathbf{P}(\theta) & 0_{P} \\ 0_{P}^{T} & 0 \end{array}\right]\left[\begin{array}{c} \mathbf{w} \\ t \end{array}\right]+\left[\begin{array}{ll} \mathbf{0}_{P}^{T}-1 \end{array}\right]\left[\begin{array}{c} \mathbf{w} \\ t \end{array}\right] \leq 0, \quad \forall \theta \in \Omega} \\ & {\left[\mathbf{w}^{H} t\right]\left[\begin{array}{c} \mathbf{a}\left(\theta_{\text {des }}\right) \\ 0 \end{array}\right]=1} \end{array} minw,t s.t. [0PT1][wt][wHt][P(θ)0PT0P0][wt]+[0PT−1][wt]≤0,∀θ∈Ω[wHt][a(θdes )0]=1
最大情况的旁瓣能量最小化问题利用离散方式近似。即: θ 1 , θ 2 , … , θ L \theta_{1}, \theta_{2}, \ldots, \theta_{L} θ1,θ2,…,θL是 Ω \Omega Ω中的采样点集合。无穷多约束的QCQP问题表示为:
min w , t t s.t. ∣ w H a ( θ i ) ∣ 2 ≤ t , i = 1 , … , L w H a ( θ des ) = 1 \begin{array}{ll} \min _{\mathbf{w}, t} & t \\ \text { s.t. } & \left|\mathbf{w}^{H} \mathbf{a}\left(\theta_{i}\right)\right|^{2} \leq t, i=1, \ldots, L \\ & \mathbf{w}^{H} \mathbf{a}\left(\theta_{\text {des }}\right)=1 \end{array} minw,t s.t. t∣∣wHa(θi)∣∣2≤t,i=1,…,LwHa(θdes )=1
下图给出了两种设计的性能图

QCQP在认知无线电(cognitive radio)发射beamforming的应用
问题描述:某次用户想要使用 K K K个主用户已经使用的频谱资源。当次用户发现频谱空洞时,使用已授权用户的频谱资源时,必须保证它的通信不会影响到已授权用户的通信,一旦该频道被主用户使用,次用户需要切换到其他空闲频段,或者继续使用该频段,但是改变发射功率活或调制方案避免对主用户的干扰。
符号:
- h S S ∈ C N S \mathbf{h}_{S S} \in \mathbb{C}^{N_{S}} hSS∈CNS: 次发射机到次接收机的信道向量
- h S k ∈ C N S \mathbf{h}_{S k} \in \mathbb{C}^{N_{S}} hSk∈CNS: 次发射机到第 k k k个主接收机的信道向量
- h k S ∈ C N k \mathbf{h}_{k S} \in \mathbb{C}^{N_{k}} hkS∈CNk: 第 k k k个主发射机到次接收机的信道向量
- N S N_{S} NS:此发射机的天线数目
- N k N_{k} Nk:第 k k k个主发射机的天线数目
- w k ∈ C N k \mathbf{w}_{k} \in \mathbb{C}^{N_{k}} wk∈CNk:第 k k k个主发射机的波束成形向量
- w S ∈ R N S \mathbf{w}_{S} \in \mathbb{R}^{N_{S}} wS∈RNS:次发射机的波束成形向量S
- σ S 2 \sigma_{S}^{2} σS2:接收机处噪声功率
假定接收均为单天线,发射信号都是单位功率的,则次接收机接收到的SINR可以表示为 :
γ S = ∣ h S S H w S ∣ 2 ∑ k = 1 K ∣ h k S H w k ∣ 2 + σ S 2 \gamma_{S}=\frac{\left|\mathbf{h}_{S S}^{H} \mathbf{w}_{S}\right|^{2}}{\sum_{k=1}^{K}\left|\mathbf{h}_{k S}^{H} \mathbf{w}_{k}\right|^{2}+\sigma_{S}^{2}} γS=∑k=1K∣∣hkSHwk∣∣2+σS2∣∣hSSHwS∣∣2
第 k k k个主发射机收到来自次发射的干扰,设其信号功率为 ∣ h S k H w S ∣ 2 \left|\mathbf{h}_{S k}^{H} \mathbf{w}_{S}\right|^{2} ∣∣hSkHwS∣∣2。设计目标:设计一个次发射波束成形向量 W S \mathbf{W}_{S} WS使得 γ S \gamma_{S} γS最大化,同时,第 k k k个主发射机的功率干扰小于阈值 ϵ k \epsilon_{k} ϵk。即:
max w S γ S s.t. ∣ h S k H w S ∣ 2 ≤ ϵ k , k = 1 , … , K ∥ w S ∥ 2 2 ≤ P S \begin{array}{ll} \max _{\mathbf{w}_{S}} & \gamma_{S} \\ \text { s.t. } & \left|\mathbf{h}_{S k}^{H} \mathbf{w}_{S}\right|^{2} \leq \epsilon_{k}, k=1, \ldots, K \\ & \left\|\mathbf{w}_{S}\right\|_{2}^{2} \leq P_{S} \end{array} maxwS s.t. γS∣∣hSkHwS∣∣2≤ϵk,k=1,…,K∥wS∥22≤PS
P S P_{S} PS是次链路的最大传输功率。定义:
A = h S S h S S H , B k = h S k h S k H , k = 1 , … , K \mathbf{A}=\mathbf{h}_{S S} \mathbf{h}_{S S}^{H}, \mathbf{B}_{k}=\mathbf{h}_{S k} \mathbf{h}_{S k}^{H}, k=1, \ldots, K A=hSShSSH,Bk=hSkhSkH,k=1,…,K
其中 A \mathbf{A} A和 B k \mathbf{B}_{k} Bk都是rank-1矩阵。原问题等价以下的QCQP为:
min w S − w S H A w S s.t. w S H B k w S ≤ ϵ k , k = 1 , … , K w S H w S ≤ P S \begin{array}{l} \min _{\mathbf{w}_{S}} &- \mathbf{w}_{S}^{H} \mathbf{A} \mathbf{w}_{S} \\ \text { s.t. } & \mathbf{w}_{S}^{H} \mathbf{B}_{k} \mathbf{w}_{S} \leq \epsilon_{k}, k=1, \ldots, K \\ & \mathbf{w}_{S}^{H} \mathbf{w}_{S} \leq P_{S} \end{array} minwS s.t. −wSHAwSwSHBkwS≤ϵk,k=1,…,KwSHwS≤PS
由于目标函数是非凸的,所以该问题是非凸的。后续解决办法(SDR)