一、CameraService启动流程
CameraService之服务流程图
一、CameraService启动流程
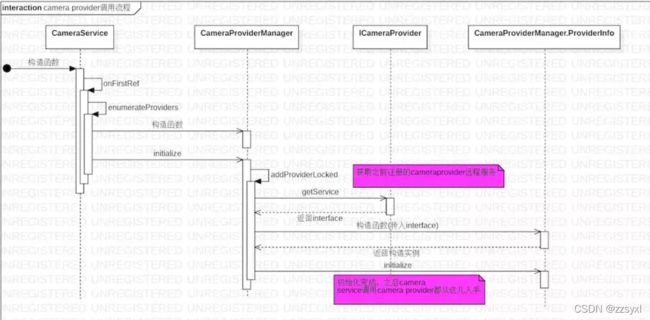
二、CameraProvider启动流程
三、CameraService总流程
1、启动脚本
//framework/av/camera/cameraserver/cameraserver.rc
//通过init进程启动cameraserver进程,启动路径为/system/bin/cameraserver
service cameraserver /system/bin/cameraserver
class main
user cameraserver
group audio camera input drmrpc
ioprio rt 4
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks
进程对应的文件为framework/av/camera/cameraserver/main_cameraserver.cpp
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
//初始化CameraService服务
CameraServe::instantiaicte();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
2、CameraServe::instantiaicte
static void instantiate() {
publish();
}
3、publish函数
首先通过CameraService::getServiceName()获取CameraService的服务名称"media.camera",而后新建CameraService
static status_t publish(bool allowIsolated = false) {
//获取IServiceManager服务器、代理对象BpServiceManager
sp<IServiceManager> sm(defaultServiceManager());
//注册服务SERVICE为CameraService
return sm->addService(String16(SERVICE::getServiceName()),new SERVICE(),allowIsolated);
}
4、addService 函数
调用BpServiceManager的addService方法
framework/native/libs/binder/IServiceManager.cpp
virtual stauts_t addService(const String16& name,const sp<IBinder>& service, bool allowIsolated)
{
Parcel data,reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
stauts_t err = remote()->transact(ADD_SERVICE_TRANSACTION,data,&reply);
return err == NO_ERROR ? reply.readExceptionCode():err;
}
5、sp
addService的 第二个参数 const sp& service传入的参数是CameraService对象,会自动调用sp的自动类型转换
system/core/libutils/include/utils/StrongPointer.h
//T 为 IBinder; U为 CameraService
templat<typename T>
templat<typename U>
sp<T>::sp(U*other) : m_ptr(other) {
if(other) {
(static_cast<T*>(other))->incStrong(this);
}
}
6、incStrong函数
inStrong 会触发 onFirstRef方法,是获取所有相机 IcameraProvider代理对象BpHwCameraProvider的流程
system/core/libutils/RefBase.cpp
void RefBase::incStrong(const void *id) const
{
weakref_impl* const refs = mRefs;
refs->incWeak(id);
refs->addStrongRef(id);
const int32_t c = refs->mStrong.fetch_add(1, std::memory_order_relaxed);
if (c != INITIAL_STRONG_VALUE) {
return;
}
int32_t old = refs->mStrong.fetch_sub(INITIAL_STRONG_VALUE,
std::memory_order_relaxed);
//触发onFirstRef方法
refs->mBase->onFirstRef();
}
7、CameraService::onFirstRef
void CameraService::onFirstRef()
{
ALOGI("CameraServer process starting");
BnCameraService::onFirstRef();
...
//在cameraService启动流程-获取ICameraProvider服务代理对象,BpHwCameraProvider ,并由此获得全部相机设备,代理对象BpHwCameraDevice
res = enumrateProviders();
...
CameraService::pingCameraServiceProxy();
}
8、CameraService::enumerateProviders
status_t CameraService::enumerateProviders() {
status_t res;
std::vector<std::string> deviceIds;
{
Mutex::Autolock 1(mServiceLock);
if(nullptr == mCameraProviderManager.get()) {
mCameraProviderManager = new CameraProviderManager();
res = mCameraProviderManager->initialize(this);
}
}
}
9、CameraProviderManager::initialize
CameraProviderManager就是管理camera Service与camera provider之间通信的工程管理类,两个参数,其中第二个参数就是远程代理类
framework/av/services/camera/libcameraservice/common/CameraProviderManager.cpp
status_t CameraProviderManager::initialize(wp<CameraProviderManager::StatusListener> listener,
ServiceInteractionProxy* proxy) {
std::lock_guard<std::mutex> lock(mInterfaceMutex);
/*listener = CameraService对象*/
mListener = listener;
/* proxy = sHardwareServiceInteractionProxy */
mServiceProxy = proxy;
bool success = mServiceProxy->registerForNotifications("",this);
/*这儿实现了camera service 与 camera provider的桥接*/
addProviderLocked(kLegacyProviderName, /*expected*/ false);
addProviderLocked(kExternalProviderName, /*expected*/ false);
return ok;
}
proxy 是默认值, proxy = sHardwareServiceInteractionProxy,这个sHardwareServiceInteractionProxy是 ---->
HardwareServiceInteractionProxy 的实例
struct HardwareServiceInteractionProxy : public ServiceInteractionProxy {
virtual bool registerForNotifications(const std::string &serviceName,
const sp<hidl::manager::V1_0::IServiceNotification>
¬ification) override {
return hardware::camera::provider::V2_4::ICameraProvider::registerForNotifications(serviceName,notification);
}
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(const std::string &serviceName) override {
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
这样一来,就得到了CameraProvider
10、addProviderLocked 函数
tatus_t CameraProviderManger::addProviderLocked(const std::string& newProvider, bool expected){
sp<provider::V2_4::ICameraProvider> interface;
/*
上面分析过 mServiceProxy = sHardwareServiceInteractionProxy
这里 getService(newProvider) 其实就是得到 CameraProvider 的代理类
所以CameraService 与 CameraProvider 就联系起来了
接着分析这个函数 HardwareServiceInteractionProxy::getService()
*/
interface = mServiceProxy->getService(newProvider);
sp<ProviderInfo> providerInfo = new ProviderInfo(newProvider,interface,this);
status_t res = providerInfo->initialize();//初始化camera provider
//CameraProviderManager.h: std::vector> mProviders;
mProviders.push_back(providerInfo);
return OK;
}
getService
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(const std::string &serviceName) override {
/*
* 调用了 ICameraProvider::getService()
* 且 getStub 为默认值 getStub = flase
* 之前分析过,getStub = flase 会得到 CameraProvider 的代理类(binder)
*/
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
11、ProviderInfo数据结构
在camera service中 就是使用 ProviderInfo 来和底层的camera provider通信的
ameraProviderManager 中提供了 一个ProviderInfo来保存 Camera provider的信息,方便管理Camera service 调用 camera provider
struct ProviderInfo :
virtual public hardware::camera::provider::V2_4ICameraProviderCallback,//ICameraProviderCallback 是 camera provider的 回调接口,也是可以IPC间通信的
virtual public hardware::hidl_death_recipient //hardware::hidl_death_recipient 是hal层的死亡回调接口,方便在底层死亡的时候通知上层
{
const std::string mProviderName;
const sp<hardware::camera::provider::V2_4::ICameraProvider> minterface;
//interface 是camera service与cameraprovider通信的IPC接口,保证两层可以顺利通信
ProviderInfo(const std::string &providerName,
sp<hardware::camera::provider:V2_4::ICameraProvider>& interface,CameraProviderManager *manager);
/初始化camera provider 并且IPC调用到camera provider 获取camera device信息
status_t initialize();
//然后调用 addDevice接口将获取的camera device保存在内存中
//addDevice ----> 将底层获取的camera device信息保存在camera service中,防止多次跨进程调用。
status_t addDevice(const std::string & name,
hardware::camera::common::V1_0::CameraDeviceStatus initialStatus =
hardware::camera::common::V1_0::CameraDeviceStatus::PRESENT,
std::string *parseId = nullptr);
//当camera provider发生变化的时候需要通知上层这些变化
virtual hardware::Return<void> cameraDeviceStatusChange(
const hardware::hidl_string& cameraDeviceName,
hardware::camera::common::V1_0::CameraDeviceStatus newStatus) override;
virtual hardware::Return<void> torchModeStatusChange(
const hardware::hidl_string& cameraDeviceName,
hardware::camera::common::V1_0::TorchModeStatus newStatus) override;
virtual void serviceDied(uint64_t cookie, const wp<hidl::base::V1_0::IBase>& who) override;
}
12、DeviceInfo3的数据结构
ProviderInfo ----> DeviceInfo3数据结构
// HALv3-specific camera fields, including the actual device interface
struct DeviceInfo3 : public DeviceInfo {
typedef hardware::camera::device::V3_2::ICameraDevice InterfaceT;
const sp<InterfaceT> mInterface;//hardware::camera::device::V3_2::ICameraDevice
virtual status_t setTorchMode(bool enabled) override;
virtual status_t getCameraInfo(hardware::CameraInfo *info) const override;
virtual bool isAPI1Compatible() const override;
virtual status_t dumpState(int fd) const override;
virtual status_t getCameraCharacteristics(
CameraMetadata *characteristics) const override;
DeviceInfo3(const std::string& name, const metadata_vendor_id_t tagId,
const std::string &id, uint16_t minorVersion,
const hardware::camera::common::V1_0::CameraResourceCost& resourceCost,
sp<InterfaceT> interface);
virtual ~DeviceInfo3();
private:
CameraMetadata mCameraCharacteristics;
};