并发编程-2
1.锁的分类
1.1 可重入锁、不可重入锁
Java中提供的synchronized,ReentrantLock,ReentrantReadWriteLock都是可重入锁。
1.1.1重入:
当前线程获取到A锁,在获取之后尝试再次获取A锁是可以直接拿到的。
1.1.2不可重入:
当前线程获取到A锁,在获取之后尝试再次获取A锁,无法获取到的,因为A锁被当前线程占用着,需要等待自己释放锁再获取锁。
1.2 乐观锁、悲观锁
Java中提供的synchronized,ReentrantLock,ReentrantReadWriteLock都是悲观锁。
Java中提供的CAS操作,就是乐观锁的一种实现。
悲观锁获取不到锁资源时,会将当前线程挂起(进入BLOCKED、WAITING),线程挂起会涉及到用户态和内核的太的切换,而这种切换是比较消耗资源的。
1.2.1用户态
JVM可以自行执行的指令,不需要借助操作系统执行。
1.2.2内核态:
JVM不可以自行执行,需要操作系统才可以执行。
乐观锁:获取不到锁资源,可以再次让CPU调度,重新尝试获取锁资源。
Atomic原子性类中,就是基于CAS乐观锁实现的。
1.3 公平锁、非公平锁
Java中提供的synchronized只能是非公平锁。
Java中提供的ReentrantLock,ReentrantReadWriteLock可以实现公平锁和非公平锁
公平锁:线程A获取到了锁资源,线程B没有拿到,线程B去排队,线程C来了,锁被A持有,同时线程B在排队。直接排到B的后面,等待B拿到锁资源或者是B取消后,才可以尝试去竞争锁资源。
非公平锁:线程A获取到了锁资源,线程B没有拿到,线程B去排队,线程C来了,先尝试竞争一波
拿到锁资源:开心,插队成功。
没有拿到锁资源:依然要排到B的后面,等待B拿到锁资源或者是B取消后,才可以尝试去竞争锁资源。
1.4 互斥锁、共享锁
Java中提供的synchronized、ReentrantLock是互斥锁。
Java中提供的ReentrantReadWriteLock,有互斥锁也有共享锁。
互斥锁:
同一时间点,只会有一个线程持有者当前互斥锁。
共享锁:
同一时间点,当前共享锁可以被多个线程同时持有。
2.synchronized详解
2.1 类锁、对象锁
synchronized的使用一般就是同步方法和同步代码块。
synchronized的锁是基于对象实现的。
如果使用同步方法
static:此时使用的是当前类.class作为锁(类锁)
非static:此时使用的是当前对象做为锁(对象锁)
public class MiTest {
public static void main(String[] args) {
// 锁的是,当前Test.class
Test.a();
Test test = new Test();
// 锁的是new出来的test对象
test.b();
}
}
class Test{
public static synchronized void a(){
System.out.println("1111");
}
public synchronized void b(){
System.out.println("2222");
}
}
2.2synchronized的优化
在JDK1.5的时候,Doug Lee推出了ReentrantLock,lock的性能远高于synchronized,所以JDK团队就在JDK1.6中,对synchronized做了大量的优化。
2.2.1锁消除:
在synchronized修饰的代码中,如果不存在操作临界资源的情况,会触发锁消除,你即便写了synchronized,他也不会触发。
public synchronized void method(){
// 没有操作临界资源
// 此时这个方法的synchronized你可以认为木有~~
}
2.2.2锁膨胀:
如果在一个循环中,频繁的获取和释放做资源,这样带来的消耗很大,锁膨胀就是将锁的范围扩大,避免频繁的竞争和获取锁资源带来不必要的消耗。
public void method(){
for(int i = 0;i < 999999;i++){
synchronized(对象){
}
}
// 这是上面的代码会触发锁膨胀
synchronized(对象){
for(int i = 0;i < 999999;i++){
}
}
}
2.2.3锁升级:
ReentrantLock的实现,是先基于乐观锁的CAS尝试获取锁资源,如果拿不到锁资源,才会挂起线程。synchronized在JDK1.6之前,完全就是获取不到锁,立即挂起当前线程,所以synchronized性能比较差。
synchronized就在JDK1.6做了锁升级的优化
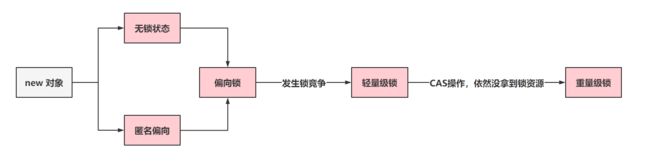
2.2.4无锁、匿名向:
当前对象没有作为锁存在。
偏向锁:
如果当前锁资源,只有一个线程在频繁的获取和释放,那么这个线程过来,只需要判断,当前指向的线程是否是当前线程 。
如果是,直接拿着锁资源走。
如果当前线程不是,我基于CAS的方式,尝试将偏向锁指向当前线程。如果获取不到,触发锁升级,升级为轻量级锁。(偏向锁状态出现了锁竞争的情况)
轻量级锁:会采用自旋锁的方式去频繁的以CAS的形式获取锁资源(采用的是自适应自旋锁)
如果成功获取到,拿着锁资源走
如果自旋了一定次数,没拿到锁资源,锁升级。
重量级锁:就是最传统的synchronized方式,拿不到锁资源,就挂起当前线程。(用户态&内核态)
2.2synchronized实现原理
synchronized是基于对象实现的。先要对Java中对象在堆内存的存储有一个了解
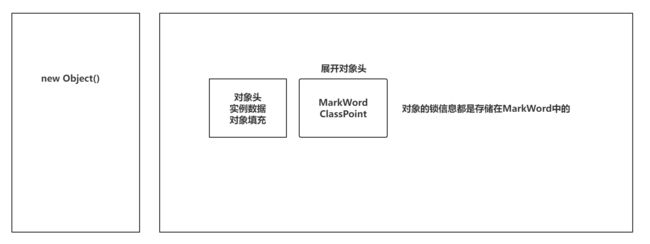
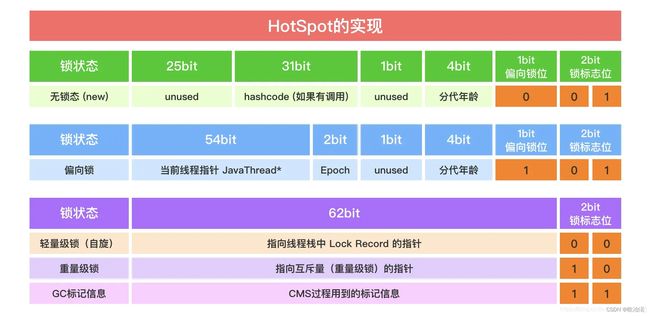
2.2.1 MarkWord
MarkWord中标记着四种锁的信息:无锁、偏向锁、轻量级锁、重量级锁
2.2.2synchronized的锁升级
为了可以在Java中看到对象头的MarkWord信息,需要导入依赖
org.openjdk.jol
jol-core
0.9
锁默认情况下,开启了偏向锁延迟。
偏向锁撤销:
偏向锁撤销是指当一个线程获取到偏向锁后,发现该对象已经被其他线程访问过,就需要将偏向锁升级为轻量级锁或重量级锁,这个过程就是偏向锁撤销。在偏向锁撤销的过程中,需要将持有偏向锁的线程ID清空,同时将对象头中的状态位设置为无锁状态。这个过程会涉及到CAS操作,因此需要保证线程安全。
偏向锁撤销的主要作用是防止偏向锁持有时间过长,导致其他线程长时间等待锁的释放,从而影响系统的性能。通过偏向锁撤销,可以使锁的获取更加公平,提升系统的并发性能。
偏向锁在升级为轻量级锁时,会涉及到偏向锁撤销,需要等到一个安全点(STW),才可以做偏向锁撤销,在明知道有并发情况,就可以选择不开启偏向锁,或者是设置偏向锁延迟开启
因为JVM在启动时,需要加载大量的.class文件到内存中,这个操作会涉及到synchronized的使用,为了避免出现偏向锁撤销操作,JVM启动初期,有一个延迟4s开启偏向锁的操作,如果正常开启偏向锁了,那么不会出现无锁状态,对象会直接变为匿名偏向
public static void main(String[] args) throws InterruptedException {
Thread.sleep(5000);
Object o = new Object();
System.out.println(ClassLayout.parseInstance(o).toPrintable());
new Thread(() -> {
synchronized (o){
//t1 - 偏向锁
System.out.println("t1:" + ClassLayout.parseInstance(o).toPrintable());
}
}).start();
//main - 偏向锁 - 轻量级锁CAS - 重量级锁
synchronized (o){
System.out.println("main:" + ClassLayout.parseInstance(o).toPrintable());
}
}
2.2.3整个锁升级状态的转变:
2.2.4 Lock Record以及ObjectMonitor存储的内容
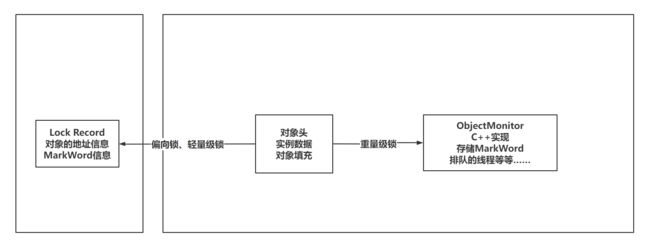
2.2.5重量锁底层ObjectMonitor
需要去找到openjdk,在百度中直接搜索openjdk,第一个链接就是
找到ObjectMonitor的两个文件,hpp,cpp
先查看核心属性:http://hg.openjdk.java.net/jdk8u/jdk8u/hotspot/file/69087d08d473/src/share/vm/runtime/objectMonitor.hpp
ObjectMonitor() {
_header = NULL; // header存储着MarkWord
_count = 0; // 竞争锁的线程个数
_waiters = 0, // wait的线程个数
_recursions = 0; // 标识当前synchronized锁重入的次数
_object = NULL;
_owner = NULL; // 持有锁的线程
_WaitSet = NULL; // 保存wait的线程信息,双向链表
_WaitSetLock = 0 ;
_Responsible = NULL ;
_succ = NULL ;
_cxq = NULL ; // 获取锁资源失败后,线程要放到当前的单向链表中
FreeNext = NULL ;
_EntryList = NULL ; // _cxq以及被唤醒的WaitSet中的线程,在一定机制下,会放到EntryList中
_SpinFreq = 0 ;
_SpinClock = 0 ;
OwnerIsThread = 0 ;
_previous_owner_tid = 0;
}
适当的查看几个C++中实现的加锁流程
http://hg.openjdk.java.net/jdk8u/jdk8u/hotspot/file/69087d08d473/src/share/vm/runtime/objectMonitor.cpp
TryLock
int ObjectMonitor::TryLock (Thread * Self) {
for (;;) {
// 拿到持有锁的线程
void * own = _owner ;
// 如果有线程持有锁,告辞
if (own != NULL) return 0 ;
// 说明没有线程持有锁,own是null,cmpxchg指令就是底层的CAS实现。
if (Atomic::cmpxchg_ptr (Self, &_owner, NULL) == NULL) {
// 成功获取锁资源
return 1 ;
}
// 这里其实重试操作没什么意义,直接返回-1
if (true) return -1 ;
}
}
try_entry
bool ObjectMonitor::try_enter(Thread* THREAD) {
// 在判断_owner是不是当前线程
if (THREAD != _owner) {
// 判断当前持有锁的线程是否是当前线程,说明轻量级锁刚刚升级过来的情况
if (THREAD->is_lock_owned ((address)_owner)) {
_owner = THREAD ;
_recursions = 1 ;
OwnerIsThread = 1 ;
return true;
}
// CAS操作,尝试获取锁资源
if (Atomic::cmpxchg_ptr (THREAD, &_owner, NULL) != NULL) {
// 没拿到锁资源,告辞
return false;
}
// 拿到锁资源
return true;
} else {
// 将_recursions + 1,代表锁重入操作。
_recursions++;
return true;
}
}
enter(想方设法拿到锁资源,如果没拿到,挂起扔到_cxq单向链表中)
void ATTR ObjectMonitor::enter(TRAPS) {
// 拿到当前线程
Thread * const Self = THREAD ;
void * cur ;
// CAS走你,
cur = Atomic::cmpxchg_ptr (Self, &_owner, NULL) ;
if (cur == NULL) {
// 拿锁成功
return ;
}
// 锁重入操作
if (cur == Self) {
// TODO-FIXME: check for integer overflow! BUGID 6557169.
_recursions ++ ;
return ;
}
//轻量级锁过来的。
if (Self->is_lock_owned ((address)cur)) {
_recursions = 1 ;
_owner = Self ;
OwnerIsThread = 1 ;
return ;
}
// 走到这了,没拿到锁资源,count++
Atomic::inc_ptr(&_count);
for (;;) {
jt->set_suspend_equivalent();
// 入队操作,进到cxq中
EnterI (THREAD) ;
if (!ExitSuspendEquivalent(jt)) break ;
_recursions = 0 ;
_succ = NULL ;
exit (false, Self) ;
jt->java_suspend_self();
}
}
// count--
Atomic::dec_ptr(&_count);
}
EnterI
for (;;) {
// 入队
node._next = nxt = _cxq ;
// CAS的方式入队。
if (Atomic::cmpxchg_ptr (&node, &_cxq, nxt) == nxt) break ;
// 重新尝试获取锁资源
if (TryLock (Self) > 0) {
assert (_succ != Self , "invariant") ;
assert (_owner == Self , "invariant") ;
assert (_Responsible != Self , "invariant") ;
return ;
}
}
3.深入ReentrantLock
3.1ReentrantLock和synchronized的区别
3.1.1核心区别:
ReentrantLock是个类,synchronized是关键字,当然都是在JVM层面实现互斥锁的方式
3.1.2效率区别:
如果竞争比较激烈,推荐ReentrantLock去实现,不存在锁升级概念。而synchronized是存在锁升级概念的,如果升级到重量级锁,是不存在锁降级的。
3.1.3底层实现区别:
实现原理是不一样,ReentrantLock基于AQS实现的,synchronized是基于ObjectMonitor
3.1.4功能向的区别:
ReentrantLock的功能比synchronized更全面。
ReentrantLock支持公平锁和非公平锁
ReentrantLock可以指定等待锁资源的时间。
选择哪个:如果你对并发编程特别熟练,推荐使用ReentrantLock,功能更丰富。如果掌握的一般般,使用synchronized会更好
3.2 AQS概述
AQS就是AbstractQueuedSynchronizer抽象类,AQS其实就是JUC包下的一个基类,JUC下的很多内容都是基于AQS实现了部分功能,比如ReentrantLock,ThreadPoolExecutor,阻塞队列,CountDownLatch,Semaphore,CyclicBarrier等等都是基于AQS实现。
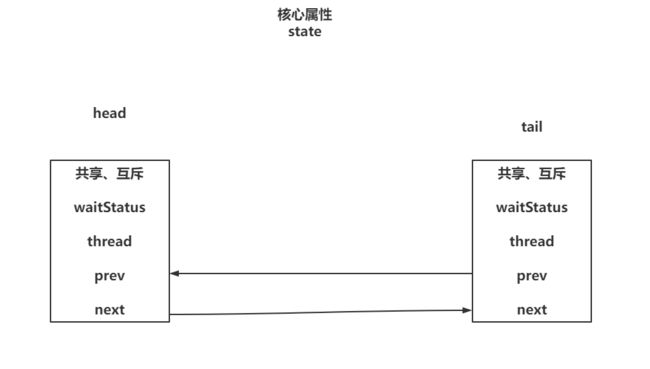
首先AQS中提供了一个由volatile修饰,并且采用CAS方式修改的int类型的state变量。
其次AQS中维护了一个双向链表,有head,有tail,并且每个节点都是Node对象
static final class Node {
static final Node SHARED = new Node();
static final Node EXCLUSIVE = null;
static final int CANCELLED = 1;
static final int SIGNAL = -1;
static final int CONDITION = -2;
static final int PROPAGATE = -3;
volatile int waitStatus;
volatile Node prev;
volatile Node next;
volatile Thread thread;
}
AQS内部结构和属性
3.3 加锁流程源码剖析
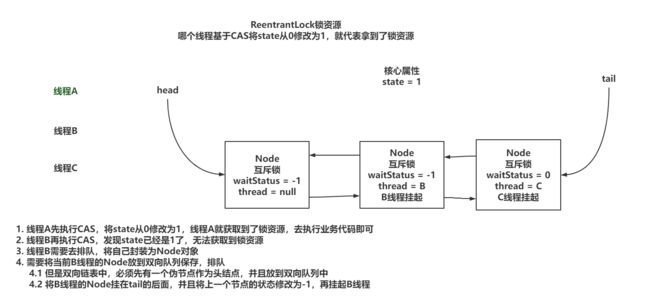
3.3.1 加锁流程概述
这个是非公平锁的流程
3.4 三种加锁源码分析
3.4.1lock方法
执行lock方法后,公平锁和非公平锁的执行套路不一样
// 非公平锁
final void lock() {
// 上来就先基于CAS的方式,尝试将state从0改为1
if (compareAndSetState(0, 1))
// 获取锁资源成功,会将当前线程设置到exclusiveOwnerThread属性,代表是当前线程持有着锁资源
setExclusiveOwnerThread(Thread.currentThread());
else
// 执行acquire,尝试获取锁资源
acquire(1);
}
// 公平锁
final void lock() {
// 执行acquire,尝试获取锁资源
acquire(1);
}
acquire方法,是公平锁和非公平锁的逻辑一样
public final void acquire(int arg) {
// tryAcquire:再次查看,当前线程是否可以尝试获取锁资源
if (!tryAcquire(arg) &&
// 没有拿到锁资源
// addWaiter(Node.EXCLUSIVE):将当前线程封装为Node节点,插入到AQS的双向链表的结尾
// acquireQueued:查看我是否是第一个排队的节点,如果是可以再次尝试获取锁资源,如果长时间拿不到,挂起线程
// 如果不是第一个排队的额节点,就尝试挂起线程即可
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
// 中断线程的操作
selfInterrupt();
}
tryAcquire方法竞争锁最资源的逻辑,分为公平锁和非公平锁
// 非公平锁实现
final boolean nonfairTryAcquire(int acquires) {
// 获取当前线程
final Thread current = Thread.currentThread();
// 获取了state熟属性
int c = getState();
// 判断state当前是否为0,之前持有锁的线程释放了锁资源
if (c == 0) {
// 再次抢一波锁资源
if (compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
// 拿锁成功返回true
return true;
}
}
// 不是0,有线程持有着锁资源,如果是,证明是锁重入操作
else if (current == getExclusiveOwnerThread()) {
// 将state + 1
int nextc = c + acquires;
if (nextc < 0) // 说明对重入次数+1后,超过了int正数的取值范围
// 01111111 11111111 11111111 11111111
// 10000000 00000000 00000000 00000000
// 说明重入的次数超过界限了。
throw new Error("Maximum lock count exceeded");
// 正常的将计算结果,复制给state
setState(nextc);
// 锁重入成功
return true;
}
// 返回false
return false;
}
// 公平锁实现
protected final boolean tryAcquire(int acquires) {
// 获取当前线程
final Thread current = Thread.currentThread();
// ....
int c = getState();
if (c == 0) {
// 查看AQS中是否有排队的Node
// 没人排队抢一手 。有人排队,如果我是第一个,也抢一手
if (!hasQueuedPredecessors() &&
// 抢一手~
compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
return true;
}
}
// 锁重入~~~
else if (current == getExclusiveOwnerThread()) {
int nextc = c + acquires;
if (nextc < 0)
throw new Error("Maximum lock count exceeded");
setState(nextc);
return true;
}
return false;
}
// 查看是否有线程在AQS的双向队列中排队
// 返回false,代表没人排队
public final boolean hasQueuedPredecessors() {
// 头尾节点
Node t = tail;
Node h = head;
// s为头结点的next节点
Node s;
// 如果头尾节点相等,证明没有线程排队,直接去抢占锁资源
return h != t &&
// s节点不为null,并且s节点的线程为当前线程(排在第一名的是不是我)
(s == null || s.thread != Thread.currentThread());
}
acquireQueued方法,判断当前线程是否还能再次尝试获取锁资源,如果不能再次获取锁资源,或者又没获取到,尝试将当前线程挂起
// 当前没有拿到锁资源后,并且到AQS排队了之后触发的方法。 中断操作这里不用考虑
final boolean acquireQueued(final Node node, int arg) {
// 不考虑中断
// failed:获取锁资源是否失败(这里简单掌握落地,真正触发的,还是tryLock和lockInterruptibly)
boolean failed = true;
try {
boolean interrupted = false;
// 死循环…………
for (;;) {
// 拿到当前节点的前继节点
final Node p = node.predecessor();
// 前继节点是否是head,如果是head,再次执行tryAcquire尝试获取锁资源。
if (p == head && tryAcquire(arg)) {
// 获取锁资源成功
// 设置头结点为当前获取锁资源成功Node,并且取消thread信息
setHead(node);
// help GC
p.next = null;
// 获取锁失败标识为false
failed = false;
return interrupted;
}
// 没拿到锁资源……
// shouldParkAfterFailedAcquire:基于上一个节点转改来判断当前节点是否能够挂起线程,如果可以返回true,
// 如果不能,就返回false,继续下次循环
if (shouldParkAfterFailedAcquire(p, node) &&
// 这里基于Unsafe类的park方法,将当前线程挂起
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
// 在lock方法中,基本不会执行。
cancelAcquire(node);
}
}
// 获取锁资源成功后,先执行setHead
private void setHead(Node node) {
// 当前节点作为头结点 伪
head = node;
// 头结点不需要线程信息
node.thread = null;
node.prev = null;
}
// 当前Node没有拿到锁资源,或者没有资格竞争锁资源,看一下能否挂起当前线程
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
// -1,SIGNAL状态:代表当前节点的后继节点,可以挂起线程,后续我会唤醒我的后继节点
// 1,CANCELLED状态:代表当前节点以及取消了
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
// 上一个节点为-1之后,当前节点才可以安心的挂起线程
return true;
if (ws > 0) {
// 如果当前节点的上一个节点是取消状态,我需要往前找到一个状态不为1的Node,作为他的next节点
// 找到状态不为1的节点后,设置一下next和prev
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
// 上一个节点的状态不是1或者-1,那就代表节点状态正常,将上一个节点的状态改为-1
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
tryLock方法
// tryLock方法,无论公平锁还有非公平锁。都会走非公平锁抢占锁资源的操作
// 就是拿到state的值, 如果是0,直接CAS浅尝一下
// state 不是0,那就看下是不是锁重入操作
// 如果没抢到,或者不是锁重入操作,告辞,返回false
public boolean tryLock() {
// 非公平锁的竞争锁操作
return sync.nonfairTryAcquire(1);
}
final boolean nonfairTryAcquire(int acquires) {
final Thread current = Thread.currentThread();
int c = getState();
if (c == 0) {
if (compareAndSetState(0, acquires)) {
setExclusiveOwnerThread(current);
return true;
}
}
else if (current == getExclusiveOwnerThread()) {
int nextc = c + acquires;
if (nextc < 0) // overflow
throw new Error("Maximum lock count exceeded");
setState(nextc);
return true;
}
return false;
}
tryLock(time,unit);
第一波分析,类似的代码:
// tryLock(time,unit)执行的方法
public final boolean tryAcquireNanos(int arg, long nanosTimeout)throws InterruptedException {
// 线程的中断标记位,是不是从false,别改为了true,如果是,直接抛异常
if (Thread.interrupted())
throw new InterruptedException();
// tryAcquire分为公平和非公平锁两种执行方式,如果拿锁成功, 直接告辞,
return tryAcquire(arg) ||
// 如果拿锁失败,在这要等待指定时间
doAcquireNanos(arg, nanosTimeout);
}
private boolean doAcquireNanos(int arg, long nanosTimeout)
throws InterruptedException {
// 如果等待时间是0秒,直接告辞,拿锁失败
if (nanosTimeout <= 0L)
return false;
// 设置结束时间。
final long deadline = System.nanoTime() + nanosTimeout;
// 先扔到AQS队列
final Node node = addWaiter(Node.EXCLUSIVE);
// 拿锁失败,默认true
boolean failed = true;
try {
for (;;) {
// 如果在AQS中,当前node是head的next,直接抢锁
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null; // help GC
failed = false;
return true;
}
// 结算剩余的可用时间
nanosTimeout = deadline - System.nanoTime();
// 判断是否是否用尽的位置
if (nanosTimeout <= 0L)
return false;
// shouldParkAfterFailedAcquire:根据上一个节点来确定现在是否可以挂起线程
if (shouldParkAfterFailedAcquire(p, node) &&
// 避免剩余时间太少,如果剩余时间少就不用挂起线程
nanosTimeout > spinForTimeoutThreshold)
// 如果剩余时间足够,将线程挂起剩余时间
LockSupport.parkNanos(this, nanosTimeout);
// 如果线程醒了,查看是中断唤醒的,还是时间到了唤醒的。
if (Thread.interrupted())
// 是中断唤醒的!
throw new InterruptedException();
}
} finally {
if (failed)
cancelAcquire(node);
}
}
取消节点分析:

// 取消在AQS中排队的Node
private void cancelAcquire(Node node) {
// 如果当前节点为null,直接忽略。
if (node == null)
return;
//1. 线程设置为null
node.thread = null;
//2. 往前跳过被取消的节点,找到一个有效节点
Node pred = node.prev;
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
//3. 拿到了上一个节点之前的next
Node predNext = pred.next;
//4. 当前节点状态设置为1,代表节点取消
node.waitStatus = Node.CANCELLED;
// 脱离AQS队列的操作
// 当前Node是尾结点,将tail从当前节点替换为上一个节点
if (node == tail && compareAndSetTail(node, pred)) {
compareAndSetNext(pred, predNext, null);
} else {
// 到这,上面的操作CAS操作失败
int ws = pred.waitStatus;
// 不是head的后继节点
if (pred != head &&
// 拿到上一个节点的状态,只要上一个节点的状态不是取消状态,就改为-1
(ws == Node.SIGNAL || (ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL)))
&& pred.thread != null) {
// 上面的判断都是为了避免后面节点无法被唤醒。
// 前继节点是有效节点,可以唤醒后面的节点
Node next = node.next;
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
// 当前节点是head的后继节点
unparkSuccessor(node);
}
node.next = node; // help GC
}
}