OTFS代码学习4:MIMO通感一体化的雷达实现
OTFS Modulation and Demodulation
OTFS Input Output relation
我们考虑有M个带宽为Δf的子载波的OTFS,那么带宽由B=M Δf计算出来的,同时我们让T表示符号时间,由T Δf = 1计算出来的,N是每个子载波包含的符号数,由此可得知一个OTFS帧持续时间中有NT个符号数。设Ns表示每个时频域要发送的数据流数,这样Ns = 1对应单个数据流的多播,Ns≤Nrf(RF链的编号)对应单个数据流的传播
数据符号{[,] },对于k=0,......N-1,l=0......M-1,属于任何QAM调制星座,被安排在一个N X M二维网格中,称为多普勒延迟域;Tx首先应用逆辛有限傅里叶变换(ISFFT)将数据符号{[,] }转换为时频域内Ns x 1维度的块{[,]}


对于任何HDA(混合数字模拟(HDA)波束形成)架构,发射机采用混合BF矩阵F (维数*)表示,接收机投影矩阵U (维数*a)表示。通过通过信道传输信号,Nrf维持续时间接收信号由下式给出
 对接收信号r(t)进行魏格纳变换后得到了接收信号y [n,m],再进行辛有限傅里叶变换(SFFT)得到时延多普勒域接收符号[, ]
对接收信号r(t)进行魏格纳变换后得到了接收信号y [n,m],再进行辛有限傅里叶变换(SFFT)得到时延多普勒域接收符号[, ]
Implementation of Hybrid Digital Analog (HDA) Beam forming(混合数字模拟(HDA)波束形成的实现)
第一个场景考虑一个宽角光束,以执行目标检测和参数估计。第二种情况是考虑多目标检测和估计其参数。在此基础上,我们提出了一种结合混合波束形成的匹配滤波器方案来联合进行目标检测和参数估计。

在b()=()在单静态雷达假设下,即雷达发射机和接收机的角度相同,向量a和b的结果相等。该通道被建模为一个维度为Na X Na的p-抽头时频选择通道,信道函数如下表示:

其中P是目标的数量,hp是包括路径损失在内的复杂信道增益。 表示AoA,每个AoA分别对应于不同的目标P。

 , = 1, … …
, = 1, … …
Implementation of RADAR equation(雷达方程的实现)
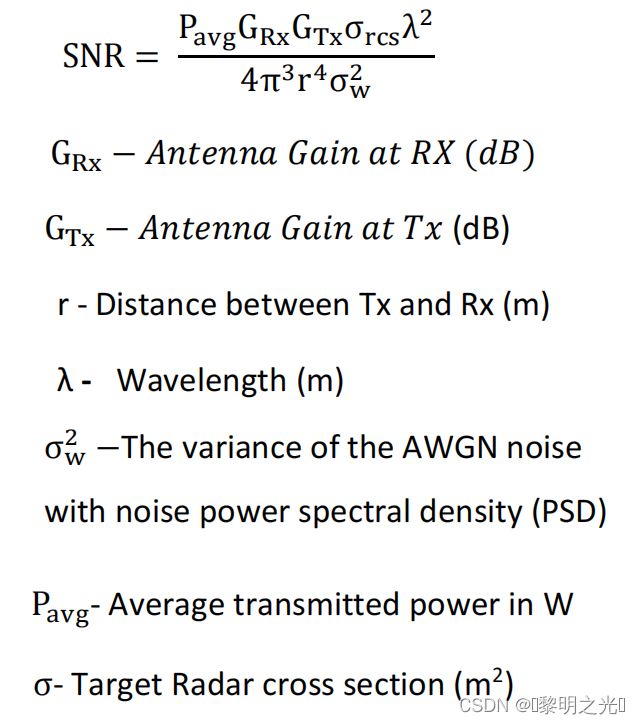
仿真中包含了雷达方程。为了计算接收到的来自目标的信号,采用雷达方程如下。远处的目标相对非常小,因为接收功率与检测距离的四次方成反比。为了使射程增加两倍,我们需要的功率比我们使用的雷达多16倍。
雷达范围方程显示了雷达截面、雷达特性,如发射机功率、天线增益、目标和雷达之间的距离,各参数定义如下:
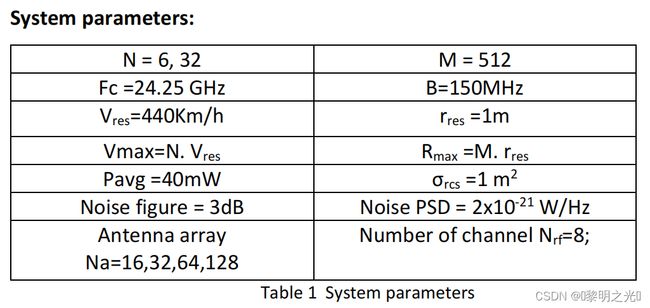
速度和范围分辨率由下表1中的系统参数决定,并由下式计算

为了获得一个合理的范围分辨率,例如,分辨率< 1 m,则必须考虑一个较大的带宽。脉冲压缩技术允许雷达利用长脉冲来实现大的辐射能量,但同时获得短脉冲的距离分辨率。由于速度分辨率与B [2]成正比,对于一个固定的fc,获得更低的值(意味着更好的分辨率)的唯一方法是增加块的大小NM,从而导致计算复杂度的显著增加,从而导致更高的成本。因此,我们在一个可行的计算复杂度下,通过关注一个合理的范围分辨率(和理论最大范围)来设置系统参数。请注意,如果后向散射功率低于噪声下限,则无法达到最大范围。
System Parameter calculation:
系统参数根据给定参数计算,表1。根据给定的系统参数计算出子载波带宽、速度分辨率(Vres)、距离分辨率、范围分辨率、多普勒频率、符号时间、延迟、最大速度和最大范围
计算系统参数:
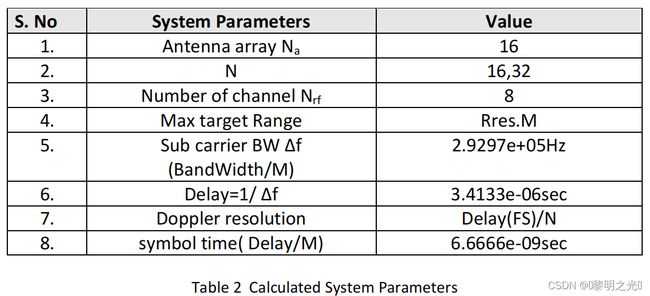
注:Vres=带宽*C/(2*N*M*fc);对于N=6;观察到Vres=为1087km/h,最大速度可达到Vmax=N*Vres =6552km/h,但它与给定的系统参数Vres不匹配,即440Km/h。所以我假设N=16;和Vres=408公里/小时,它匹配给定的系统参数。对于N=32,Vres=203公里/小时。对于N=32多普勒箱分辨率= 9.1553e+03 Hz,对于N=16多普勒箱分辨率= 1.8311e+04 Hz。
系统流程图如下:

仿真结果如下:
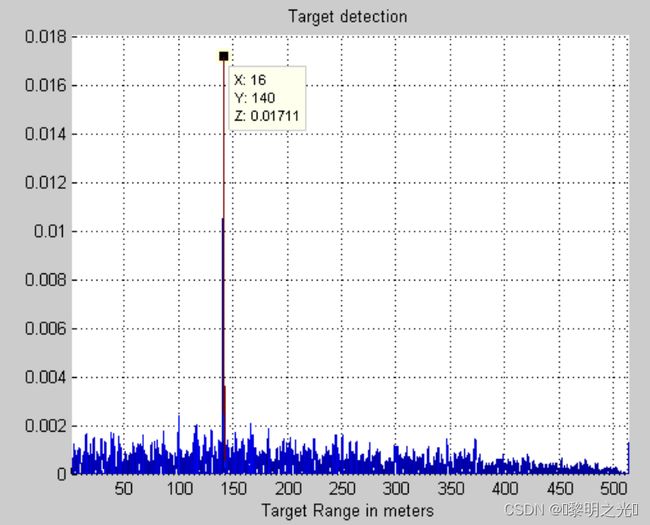
单目标检测(N=32):

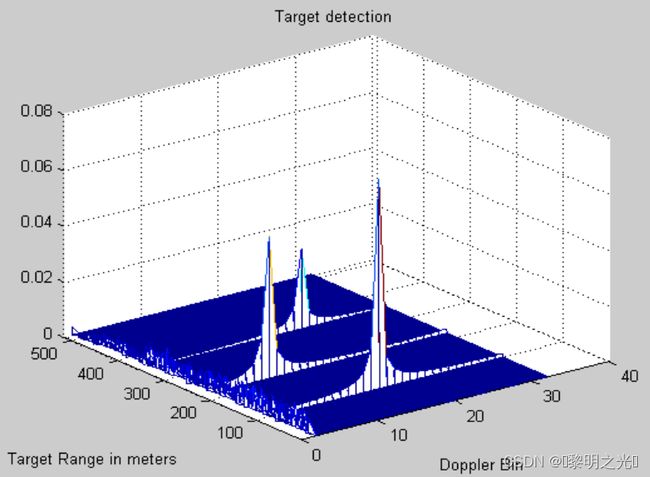
多目标检测(N=32):

Conclusion
在这个项目中,我模拟了基于不同多普勒、距离、AOA和目标检测的MIMO单静态雷达的目标生成,并使用OTFS调制和解调进行雷达参数估计,即距离、速度和AOA。并在目标检测和参数估计过程中实现了匹配滤波算法、混合波束形成算法和雷达方程模块等模块。详细说明了OTFS的基本原理和OTFS的性能,仿真结果表明,利用OTFS调制可以建立雷达功能和估计雷达参数。实现从另一辆车到移动车辆的信息通信,跟踪MIMO雷达的性能,提高距离和速度分辨率是未来的工作。