- 深入浅出Node.js后端开发
jghhh01
node.js
让我们来理解Node.js的核心——事件循环和异步编程模型。在Node.js中,所有的I/O操作都是非阻塞的,这意味着当一个请求开始等待I/O操作完成时(如读取文件或数据库操作),Node.js不会阻塞后续操作,而是继续执行其他任务。这种机制大大提高了应用的性能和吞吐量。constfs=require('fs');fs.readFile('file.txt','utf8',(err,data)=>
- Tomcat性能调优指南
文章目录一、Tomcat性能调优概述为什么需要调优Tomcat?二、Tomcat架构与性能关键点三、JVM调优1.内存配置优化2.垃圾回收优化3.其他JVM优化参数四、连接器(Connector)调优1.NIOvsAPR/Native2.高级NIO配置五、线程池优化六、会话管理优化1.会话超时配置2.会话持久化选择七、静态资源处理优化1.启用Sendfile2.配置静态资源缓存八、其他优化措施1.
- vmvare如何给centos7 设置静态IP地址
Roc-xb
服务器tcp/ipphp服务器
本章教程,主要介绍如何在vmvare中如何给虚拟机中设置静态IP地址。本章教程中使用的linux发行版是centos7。目前没有静态IP地址,并且不能联网,此时我们需要给它配置一个静态IP,并且可以实现联网功能。一、前置步骤1、网络设置2、添加网络添加一个虚拟机网络,选择VMnet8,如果被占用了,可以选择其他的名字。3、选择NAT模式
- 微服务:从“大锅菜“到“自助餐“的架构进化
MarkSea.
架构微服务云原生
在软件开发的世界里,架构就像是烹饪艺术。传统的单体应用就像一锅东北大锅菜,所有食材(功能)混在一起熬煮,香是香,但想单独调整某种食材的味道?对不起,得掀翻整锅重来。而微服务架构则像现代化的自助餐厅,每道菜(服务)独立存在,想吃什么拿什么,想调整哪道菜只需要处理那一小部分,其他客人(用户)还能继续享用其他美食。什么是微服务?——火锅店里的"自助小料台"理论将应用拆成多个独立小服务,通过轻量级API(
- 高考志愿不会填? AI 帮你填写高考志愿,手把手教你完成志愿填报
AI、少年郎
高考人工智能数据挖掘
一、背景高考成绩一出,志愿填报就成了家长和考生的“头号难题”。选对专业和院校,相当于为未来铺好一条“黄金赛道”!但面对海量院校和专业信息,怎么才能快速锁定适合自己的选项?别慌!今天就教你用AI轻松搞定志愿填报,不过先划重点:AI建议仅供参考,最终决策一定要结合实际、多方求证!本次以AI豆包为例,其他AI工具类似。可能很多人都说AI填报志愿谁不会啊,就是把问题抛给AI,让其帮着分析就行,但是对很多不
- 转全角半角(C#,VB.NET)
chinaherolts2008
vb.net教程c#开发语言vb.net教程
vb.net教程https://www.xin3721.com/eschool/vbnetxin3721///////转全角的函数(SBCcase)//////任意字符串///全角字符串//////全角空格为12288,半角空格为32///其他字符半角(33-126)与全角(65281-65374)的对应关系是:均相差65248///publicstringToSBC(stringinput){/
- C# 用VB.NET函数库 实现全角半角转换
Jelly_tracy
C#vb.netc#stringmicrosoftcinput
///转全角的函数(SBCcase)//////任意字符串///全角字符串//////全角空格为12288,半角空格为32///其他字符半角(33-126)与全角(65281-65374)的对应关系是:均相差65248///publicstringToSBC(stringinput){//半角转全角:char[]c=input.ToCharArray();for(inti=0;i65280&&c[
- 后端开发工程师(.Net方向)
Flora051
求职招聘
5年以上,23-30k职位描述:工作内容:1、负责相应产品模块的需求分析、框架设计和编码工作;2、分析项目需求,能给出良好的解决方案,并协助其他人员完成开发及调试工作;3、Codereview,编写单元测试,高质量完成功能;4、持续关注新的技术,选择适合的技术持续迭代改进产品。任职资格:1.计算机相关专业,必须本科及以上学历,5年以上.net研发经验(core3年以上);2.有医疗健康开发经验者优
- Kotlin中如何优雅地退出循环
锐湃
Kotlinkotlin开发语言android
在Kotlin中,forEach是一个高阶函数,它在遍历集合时会对集合中的每一个元素执行给定的lambda表达式。若要在forEach中退出循环,return会返回到外层函数,而不是终止循环。因此,使用return@forEach不能达到预期的效果。合理的做法是使用带标签的return或者是使用其他循环结构,如for循环。在forEach中你可以使用自定义的标签配合return,以退出循环。例如:
- 【学习】《算法图解》第九章学习笔记:迪杰斯特拉算法
程序员
一、迪杰斯特拉算法概述迪杰斯特拉算法(Dijkstra'salgorithm)是一种解决带权有向图上单源最短路径问题的贪心算法,由荷兰计算机科学家艾兹赫尔·迪杰斯特拉(EdsgerW.Dijkstra)于1956年提出。该算法常用于路由协议,也可以用作其他图算法的子程序。(一)算法适用场景迪杰斯特拉算法适用于:带权有向图(每条边都有权重)所有权重都为非负值(不能有负权边)需要找出从一个顶点到图中所
- 【用户权限】超级用户(二)
超级用户Linux系统中的root账号通常用于系统的维护和管理,对操作系统的所有资源具有所有访问权限在大多数版本的Linux中,都不推荐直接使用root账号登录系统在Linux安装的过程中,系统会自动创建一个用户账号,而这个默认的用户就称为“标准用户”sudosu是substituteuser的缩写,表示使用另一个用户的身份sudo命令用来以其他身份来执行命令,预设的身份为root用户使用sudo
- 小米路由安装frpc
zngw
sshfrp
一、起因家里部署了Nas,在出租屋里直接使用frp访问外网服务器转发的是可以用,但是,流量得多贵啊,还有中间商赚带宽。于是想了一下,在出租屋的路由上部署frp客户端,使用xtcp协议,打洞直连,速度快还不需要流量。二、流程前提条件:一台公网frps服务器家里Nas,已经配置好SMB文件共享(端口445)、WebDav(端口80,可选端口443),其他自行发挥。出租屋解锁SSH的小米路由,我家是小米
- ai工具推荐系列:文生图,图生图工具liblibAi
风生水气
ai应用体验人工智能深度学习神经网络
在ai应用泛滥的今天,你是否也想通过简单的描述来创作一张这样高质量的图片?你可能听过一些比较知名软件,比如Midjourney,Stability.ai等,但是这些软件在国内访问起来都不是很方便。今天推荐一个国内可以访问的且可以生成较高自由度的图片生成工具---liblibAi。相比于国内其他的文生图,图生图工具,它拥有更多的参数可供调节,可以从不同粒度约束图片最终的生成效果。对于专业的同学来说更
- 多模态融合相机L3CAM
moonsims
人工智能
多模态融合相机L3CAML3CAM是Beamagine公司推出的多模态传感器融合技术,结合了激光雷达(LiDAR)和可见光摄像头,旨在为自动驾驶、工业机器人和其他需要精确环境感知的应用场景提供高效、安全的解决方案。L3CAM技术参数L3CAM结合了LiDAR和可见光摄像头,使其能够提供三维空间感知及图像级别的环境识别能力激光雷达部分(LiDAR)探测范围:大约200米(具体范围根据不同环境和反射面
- 高效主机发现与端口枚举:fscan工具实战指南
Bruce_xiaowei
笔记总结经验网络安全fscan信息搜集
高效主机发现与端口枚举:fscan工具实战指南在网络安全领域,主机发现与端口枚举是渗透测试和信息收集的基础环节。本文将深入探讨fscan这一高效工具的核心技术原理与实战应用,帮助你快速掌握网络扫描的核心技能。一、fscan与Nmap工具对比特性fscanNmap开发语言Python3C++主要功能主机探测、端口扫描、漏洞检测主机发现、服务识别、OS检测爆破能力内置弱口令检测需配合其他工具扫描速度极
- 【全网最快,不服来战,输了叫大哥】Ubuntu 22.04安装Docker
逆羽飘扬
Docker学习ubuntudockerlinux
文章目录Docker的安装快速绿色安装Docker正常安装Docker报错解决完全卸载Docker其他问题解决方法参考博客点此到文末惊喜↩︎Docker的安装特别鸣谢,这位大佬写的非常好:https://blog.csdn.net/weixin_42571882/article/details/134015815比我速度快、简单且稳定的,评论区给我你的博客,输了叫你大哥快速绿色安装Docker选择
- LGTM?Github中那些迷之缩写
SunTecTec
github
PR:PullRequest.拉取请求,给其他项目提交代码LGTM:LooksGoodToMe.朕知道了代码已经过review,可以合并SGTM:SoundsGoodToMe.和上面那句意思差不多,也是已经通过了review的意思WIP:WorkInProgress.传说中提PR的最佳实践是,如果你有个改动很大的PR,可以在写了一部分的情况下先提交,但是在标题里写上WIP,以告诉项目维护者这个功能
- 机器学习算法——神经网络1(神经元模型)
神经网络是由具有适应性的简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。神经网络中最基本的成分是神经元(neuron)模型。即上述定义中的“简单单元”。在生物神经网络中,每个神经元与其他申请元相连,当它“兴奋”时,就会向相连的神经元发送化学物质,从而改变这些神经元内的电位;如果某神经元的电位超过一个“阈值”,那么它就会被激活,即“兴奋”起来,向其他神经
- 心跳报文 - Linux C++网络编程(二十八)
生活需要深度
linux内核网络编程
一:前面学习的总结核心架构浓缩总结实现的功能:(1)服务器按照包头包体格式正确的接收客户端发送过来的数据包;(2)根据手动的包的不同来执行不同的业务处理逻辑;(3)把业务处理产生的结果数据包返回客户端;咱们用到的主要技术(1)epoll高并发通讯技术(2)线程池技术来处理业务逻辑(3)线程之间的同步技术包括互斥量、信号量其他技术:信号,日志打印,fork()子进程,守护进程借鉴了哪些官方nginx
- 【算法设计与分析】(四)Strassen 矩阵
珹洺
#算法设计与分析算法矩阵线性代数
【算法设计与分析】(四)Strassen矩阵前言一、传统矩阵乘法二、Strassen矩阵乘法1.算法步骤2.效率提升三、实际应用场景四、算法的局限性与改进前言上一篇博客我们以生动形象的例子和清晰的步骤,为大家详细讲解了二分搜索技术与大整数乘法。接下来,这篇博客将带大家深入探索**Strassen矩阵**乘法,感受算法优化魅力。我的个人主页,欢迎来阅读我的其他文章https://blog.csdn.
- YOLOv13:开启目标检测新时代,手把手教你实操
奔跑吧邓邓子
必备核心技能YOLO目标检测目标跟踪人工智能实操
目录一、YOLOv13初印象1.1YOLO系列发展脉络1.2YOLOv13独特之处二、前期准备工作2.1环境搭建2.2依赖安装三、深入使用指南3.1模型验证3.2模型训练3.3模型推理四、应用案例与拓展4.1实际场景应用展示4.2与其他技术结合思路五、总结与展望一、YOLOv13初印象1.1YOLO系列发展脉络YOLO(YouOnlyLookOnce)系列算法在目标检测领域中,就如同一位不断进化的
- Python+Vue计算机毕业设计智慧养老院管理系统egn81(源码+程序+LW+部署)
心心毕设程序源码
pythonvue.js课程设计
该项目含有源码、文档、程序、数据库、配套开发软件、软件安装教程项目运行环境配置:Python3.7.7+Django+Mysql5.7+piplist+HBuilderX(Vscode也行)+Vue+Pychram社区版。项目技术:Django+Vue+Python+Mysql等等组成,B/S模式等等。环境需要1.运行环境:最好是安装Python3.7.7,我们在这个平台上运行的。其他版本理论上也
- java项目启动报错‘dependencies.dependency.systemPath‘ for com.jacob:jacob:jar must specify an absolute path
橙-极纪元JJYCheng
javadependenciessystemPath
java项目启动报错’dependencies.dependency.systemPath’forcom.jacob:jacob:jarmustspecifyanabsolutepath我的建议请看《解决方案7-让Maven只专注拉取远程的第三方包》这样,你的Maven只专注拉取远程的第三方包其他操作交给编辑器如果你觉着这样不是你的风格请看《解决方案1-运行mvninstall:install-f
- YOLOv13:目标检测的全面攻略与实战指南
奔跑吧邓邓子
必备核心技能YOLO目标检测目标跟踪人工智能全攻略实战
目录一、YOLOv13简介1.1YOLO系列发展回顾1.2YOLOv13的特点与优势二、YOLOv13原理剖析2.1HyperACE技术详解2.2FullPAD技术详解2.3轻量级卷积替换技术详解三、YOLOv13性能对比3.1与其他YOLO版本对比3.2实际应用场景对比四、YOLOv13项目结构与使用方式4.1仓库文件结构介绍4.2快速上手步骤五、YOLOv13优化技巧5.1数据增强技巧5.2锚
- python采集淘宝评论,API接口丨json数据示例参考
ID_18007905473
APIpython大数据jsonpython
在Python中采集淘宝商品评论数据,通常需要通过淘宝开放平台提供的API接口来实现。然而,淘宝开放平台并没有直接提供公开的评论API接口,因此需要通过其他方式间接获取评论数据。以下是一个使用Python通过网页爬虫技术获取淘宝商品评论数据的示例。请注意,这个示例仅用于学习和研究目的,请确保遵守淘宝的使用条款和相关法律法规。示例代码importrequestsfrombs4importBeauti
- 跟着感觉走 threejs 第一篇
引言在实际开发的过程中,你是否经常遇到这样一种情形。需要用到一个组件,这个组件你抑或者其他小伙伴之前已经实现了,你内心窃喜,又可以使出拿来主义大法了。打开一看,发现之前的组件代码其中包含了很多强耦合的代码逻辑,导致不能够完全为你所用,不香不臭,弃之可惜食之无味。这个时候,聪明的你,很快的想到了使出必杀技copy大法。但过来人的我相信,你内心深处是处于极度抗拒的,一方面又想赶快实现业务功能开发,另一
- CNN-LSTM神经网络多输入单输出回归预测【MATLAB】
沅_Yuan
炼丹师神经网络cnnlstm
1CNN(卷积神经网络)部分作用:特征提取:CNN主要用于从输入数据中提取空间特征。它能够处理图像、视频帧或其他形式的空间数据。组成部分:卷积层:使用卷积核对输入数据进行卷积操作,生成特征图。激活函数:通常使用ReLU(线性整流单元)激活函数,增加非线性。池化层:通过最大池化(MaxPooling)或平均池化(AveragePooling),减少特征图的尺寸,保留最重要的特征,减少计算复杂度。流程
- 【LeetCode】串联所有单词的子串 java
手写从前Code
LeetCode刷题leetcode算法哈希表
给定一个字符串s和一些长度相同的单词words。找出s中恰好可以由words中所有单词串联形成的子串的起始位置。注意子串要与words中的单词完全匹配,中间不能有其他字符,但不需要考虑words中单词串联的顺序。示例1:输入:s="barfoothefoobarman",words=["foo","bar"]输出:[0,9]解释:从索引0和9开始的子串分别是"barfoo"和"foobar"。输出
- 性能分析定界指南
harmonyos
性能分析定界指南前置条件HarmonyOSNext系统前台运行Flutter页面分析工具DevEcoStudioProfilerSmartPerfFlutter线程介绍Flutter使用多个线程来完成其必要的工作,图层中仅展示了其中两个线程。你写的所有Dart代码都在UI线程上运行。尽管你没有直接访问其他线程的权限,但是你对UI线程的操作会对其他线程产生性能影响。平台线程平台的主线,插件代码在这里
- 前端react面试题之实现网页多选搜索框
烟雨-yaya
前端react.js前端框架
需求提供100位用户信息。其用户信息含:{id:1,age:42,name:'张小强',address:"北京"},;要求1:需要设计可以多选择来筛选得到指点条件用户表,可以选择=>各阶段年龄端或者不同地区的。选择的条件,可以清空;要求2:选择的条件,需要在页面路由上呈现;方便其他用户copy,可以查询到一样的结果;实例网页实现实现需要提前下载相关依赖哈,nanoidimportReact,{Fr
- 解读Servlet原理篇二---GenericServlet与HttpServlet
周凡杨
javaHttpServlet源理GenericService源码
在上一篇《解读Servlet原理篇一》中提到,要实现javax.servlet.Servlet接口(即写自己的Servlet应用),你可以写一个继承自javax.servlet.GenericServletr的generic Servlet ,也可以写一个继承自java.servlet.http.HttpServlet的HTTP Servlet(这就是为什么我们自定义的Servlet通常是exte
- MySQL性能优化
bijian1013
数据库mysql
性能优化是通过某些有效的方法来提高MySQL的运行速度,减少占用的磁盘空间。性能优化包含很多方面,例如优化查询速度,优化更新速度和优化MySQL服务器等。本文介绍方法的主要有:
a.优化查询
b.优化数据库结构
- ThreadPool定时重试
dai_lm
javaThreadPoolthreadtimertimertask
项目需要当某事件触发时,执行http请求任务,失败时需要有重试机制,并根据失败次数的增加,重试间隔也相应增加,任务可能并发。
由于是耗时任务,首先考虑的就是用线程来实现,并且为了节约资源,因而选择线程池。
为了解决不定间隔的重试,选择Timer和TimerTask来完成
package threadpool;
public class ThreadPoolTest {
- Oracle 查看数据库的连接情况
周凡杨
sqloracle 连接
首先要说的是,不同版本数据库提供的系统表会有不同,你可以根据数据字典查看该版本数据库所提供的表。
select * from dict where table_name like '%SESSION%';
就可以查出一些表,然后根据这些表就可以获得会话信息
select sid,serial#,status,username,schemaname,osuser,terminal,ma
- 类的继承
朱辉辉33
java
类的继承可以提高代码的重用行,减少冗余代码;还能提高代码的扩展性。Java继承的关键字是extends
格式:public class 类名(子类)extends 类名(父类){ }
子类可以继承到父类所有的属性和普通方法,但不能继承构造方法。且子类可以直接使用父类的public和
protected属性,但要使用private属性仍需通过调用。
子类的方法可以重写,但必须和父类的返回值类
- android 悬浮窗特效
肆无忌惮_
android
最近在开发项目的时候需要做一个悬浮层的动画,类似于支付宝掉钱动画。但是区别在于,需求是浮出一个窗口,之后边缩放边位移至屏幕右下角标签处。效果图如下:
一开始考虑用自定义View来做。后来发现开线程让其移动很卡,ListView+动画也没法精确定位到目标点。
后来想利用Dialog的dismiss动画来完成。
自定义一个Dialog后,在styl
- hadoop伪分布式搭建
林鹤霄
hadoop
要修改4个文件 1: vim hadoop-env.sh 第九行 2: vim core-site.xml <configuration> &n
- gdb调试命令
aigo
gdb
原文:http://blog.csdn.net/hanchaoman/article/details/5517362
一、GDB常用命令简介
r run 运行.程序还没有运行前使用 c cuntinue
- Socket编程的HelloWorld实例
alleni123
socket
public class Client
{
public static void main(String[] args)
{
Client c=new Client();
c.receiveMessage();
}
public void receiveMessage(){
Socket s=null;
BufferedRea
- 线程同步和异步
百合不是茶
线程同步异步
多线程和同步 : 如进程、线程同步,可理解为进程或线程A和B一块配合,A执行到一定程度时要依靠B的某个结果,于是停下来,示意B运行;B依言执行,再将结果给A;A再继续操作。 所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回,同时其它线程也不能调用这个方法
多线程和异步:多线程可以做不同的事情,涉及到线程通知
&
- JSP中文乱码分析
bijian1013
javajsp中文乱码
在JSP的开发过程中,经常出现中文乱码的问题。
首先了解一下Java中文问题的由来:
Java的内核和class文件是基于unicode的,这使Java程序具有良好的跨平台性,但也带来了一些中文乱码问题的麻烦。原因主要有两方面,
- js实现页面跳转重定向的几种方式
bijian1013
JavaScript重定向
js实现页面跳转重定向有如下几种方式:
一.window.location.href
<script language="javascript"type="text/javascript">
window.location.href="http://www.baidu.c
- 【Struts2三】Struts2 Action转发类型
bit1129
struts2
在【Struts2一】 Struts Hello World http://bit1129.iteye.com/blog/2109365中配置了一个简单的Action,配置如下
<!DOCTYPE struts PUBLIC
"-//Apache Software Foundation//DTD Struts Configurat
- 【HBase十一】Java API操作HBase
bit1129
hbase
Admin类的主要方法注释:
1. 创建表
/**
* Creates a new table. Synchronous operation.
*
* @param desc table descriptor for table
* @throws IllegalArgumentException if the table name is res
- nginx gzip
ronin47
nginx gzip
Nginx GZip 压缩
Nginx GZip 模块文档详见:http://wiki.nginx.org/HttpGzipModule
常用配置片段如下:
gzip on; gzip_comp_level 2; # 压缩比例,比例越大,压缩时间越长。默认是1 gzip_types text/css text/javascript; # 哪些文件可以被压缩 gzip_disable &q
- java-7.微软亚院之编程判断俩个链表是否相交 给出俩个单向链表的头指针,比如 h1 , h2 ,判断这俩个链表是否相交
bylijinnan
java
public class LinkListTest {
/**
* we deal with two main missions:
*
* A.
* 1.we create two joined-List(both have no loop)
* 2.whether list1 and list2 join
* 3.print the join
- Spring源码学习-JdbcTemplate batchUpdate批量操作
bylijinnan
javaspring
Spring JdbcTemplate的batch操作最后还是利用了JDBC提供的方法,Spring只是做了一下改造和封装
JDBC的batch操作:
String sql = "INSERT INTO CUSTOMER " +
"(CUST_ID, NAME, AGE) VALUES (?, ?, ?)";
- [JWFD开源工作流]大规模拓扑矩阵存储结构最新进展
comsci
工作流
生成和创建类已经完成,构造一个100万个元素的矩阵模型,存储空间只有11M大,请大家参考我在博客园上面的文档"构造下一代工作流存储结构的尝试",更加相信的设计和代码将陆续推出.........
竞争对手的能力也很强.......,我相信..你们一定能够先于我们推出大规模拓扑扫描和分析系统的....
- base64编码和url编码
cuityang
base64url
import java.io.BufferedReader;
import java.io.IOException;
import java.io.InputStreamReader;
import java.io.PrintWriter;
import java.io.StringWriter;
import java.io.UnsupportedEncodingException;
- web应用集群Session保持
dalan_123
session
关于使用 memcached 或redis 存储 session ,以及使用 terracotta 服务器共享。建议使用 redis,不仅仅因为它可以将缓存的内容持久化,还因为它支持的单个对象比较大,而且数据类型丰富,不只是缓存 session,还可以做其他用途,一举几得啊。1、使用 filter 方法存储这种方法比较推荐,因为它的服务器使用范围比较多,不仅限于tomcat ,而且实现的原理比较简
- Yii 框架里数据库操作详解-[增加、查询、更新、删除的方法 'AR模式']
dcj3sjt126com
数据库
public function getMinLimit () { $sql = "..."; $result = yii::app()->db->createCo
- solr StatsComponent(聚合统计)
eksliang
solr聚合查询solr stats
StatsComponent
转载请出自出处:http://eksliang.iteye.com/blog/2169134
http://eksliang.iteye.com/ 一、概述
Solr可以利用StatsComponent 实现数据库的聚合统计查询,也就是min、max、avg、count、sum的功能
二、参数
- 百度一道面试题
greemranqq
位运算百度面试寻找奇数算法bitmap 算法
那天看朋友提了一个百度面试的题目:怎么找出{1,1,2,3,3,4,4,4,5,5,5,5} 找出出现次数为奇数的数字.
我这里复制的是原话,当然顺序是不一定的,很多拿到题目第一反应就是用map,当然可以解决,但是效率不高。
还有人觉得应该用算法xxx,我是没想到用啥算法好...!
还有觉得应该先排序...
还有觉
- Spring之在开发中使用SpringJDBC
ihuning
spring
在实际开发中使用SpringJDBC有两种方式:
1. 在Dao中添加属性JdbcTemplate并用Spring注入;
JdbcTemplate类被设计成为线程安全的,所以可以在IOC 容器中声明它的单个实例,并将这个实例注入到所有的 DAO 实例中。JdbcTemplate也利用了Java 1.5 的特定(自动装箱,泛型,可变长度
- JSON API 1.0 核心开发者自述 | 你所不知道的那些技术细节
justjavac
json
2013年5月,Yehuda Katz 完成了JSON API(英文,中文) 技术规范的初稿。事情就发生在 RailsConf 之后,在那次会议上他和 Steve Klabnik 就 JSON 雏形的技术细节相聊甚欢。在沟通单一 Rails 服务器库—— ActiveModel::Serializers 和单一 JavaScript 客户端库——&
- 网站项目建设流程概述
macroli
工作
一.概念
网站项目管理就是根据特定的规范、在预算范围内、按时完成的网站开发任务。
二.需求分析
项目立项
我们接到客户的业务咨询,经过双方不断的接洽和了解,并通过基本的可行性讨论够,初步达成制作协议,这时就需要将项目立项。较好的做法是成立一个专门的项目小组,小组成员包括:项目经理,网页设计,程序员,测试员,编辑/文档等必须人员。项目实行项目经理制。
客户的需求说明书
第一步是需
- AngularJs 三目运算 表达式判断
qiaolevip
每天进步一点点学习永无止境众观千象AngularJS
事件回顾:由于需要修改同一个模板,里面包含2个不同的内容,第一个里面使用的时间差和第二个里面名称不一样,其他过滤器,内容都大同小异。希望杜绝If这样比较傻的来判断if-show or not,继续追究其源码。
var b = "{{",
a = "}}";
this.startSymbol = function(a) {
- Spark算子:统计RDD分区中的元素及数量
superlxw1234
sparkspark算子Spark RDD分区元素
关键字:Spark算子、Spark RDD分区、Spark RDD分区元素数量
Spark RDD是被分区的,在生成RDD时候,一般可以指定分区的数量,如果不指定分区数量,当RDD从集合创建时候,则默认为该程序所分配到的资源的CPU核数,如果是从HDFS文件创建,默认为文件的Block数。
可以利用RDD的mapPartitionsWithInd
- Spring 3.2.x将于2016年12月31日停止支持
wiselyman
Spring 3
Spring 团队公布在2016年12月31日停止对Spring Framework 3.2.x(包含tomcat 6.x)的支持。在此之前spring团队将持续发布3.2.x的维护版本。
请大家及时准备及时升级到Spring
- fis纯前端解决方案fis-pure
zccst
JavaScript
作者:zccst
FIS通过插件扩展可以完美的支持模块化的前端开发方案,我们通过FIS的二次封装能力,封装了一个功能完备的纯前端模块化方案pure。
1,fis-pure的安装
$ fis install -g fis-pure
$ pure -v
0.1.4
2,下载demo到本地
git clone https://github.com/hefangshi/f

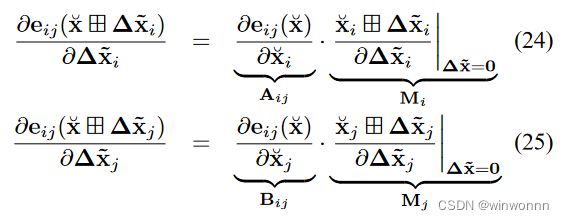
 ——From State Estimation for Robotics Eq.7.91
——From State Estimation for Robotics Eq.7.91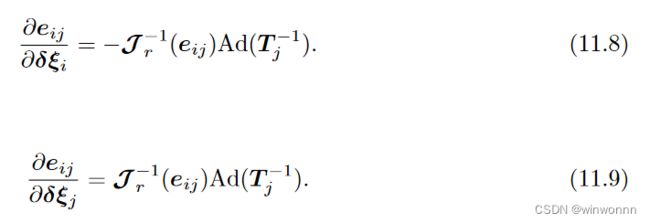 2.State Estimation for Robotics
2.State Estimation for Robotics 3.MATLAB
3.MATLAB