第十三届蓝桥杯嵌入式备赛-STM32G431-进阶模块调试⑨PWM输入捕获
目录
0.前言
1.功能要求
电路原理图
2.STM32Cubemx初始化
TIM3详细设置
开启TIM3中断
TIM8详细设置
开启TIM8中断
3.程序实现
main.c相关初始化
PWM输入捕获中断回调函数
4.工程文件
0.前言
这套教程针对于蓝桥杯嵌入式比赛的底层模块调试,针对于比赛进行每个模块的调试,低层模块调试好,对于赛题的实现就会方便很多,虽然有一些应试教育的意味,不过准备这个比赛对于程序整体实现思维还是有着很大帮助,我也从中受益颇多!
1.功能要求
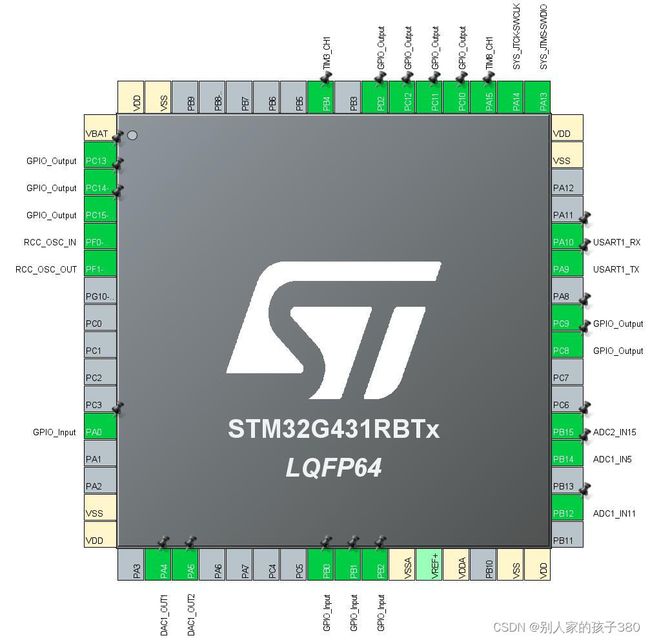
使用PWM输入捕获获得PWM的频率和占空比,在这块板子上有两个555定时器,我们所要捕获的就是这两个555定时器产生PWM的频率和占空比
电路原理图

2.STM32Cubemx初始化
将PB4设置为TIM3_CH1、将PA14设置为TIM8_CH1。
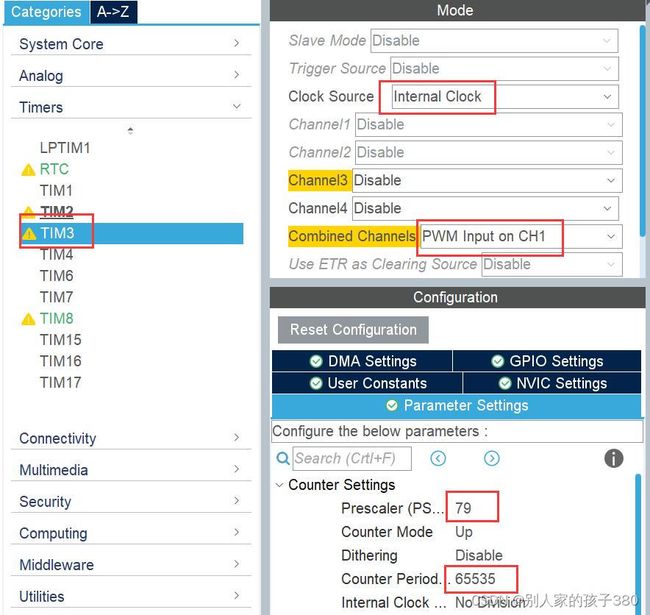
TIM3详细设置
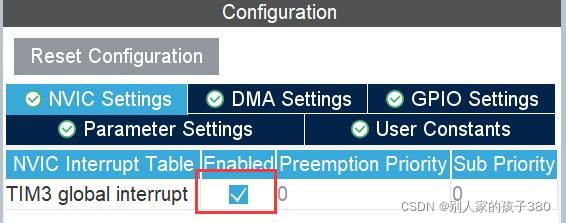
开启TIM3中断
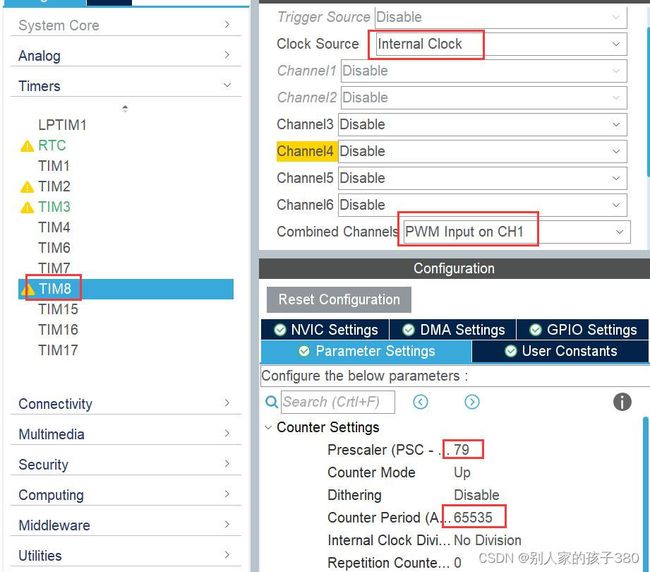
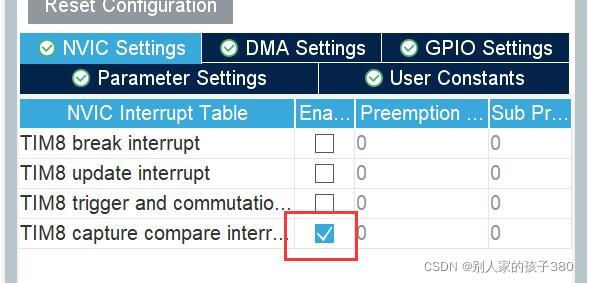
TIM8详细设置
开启TIM8中断
3.程序实现
main.c相关初始化
函数功能均在注释中
main.c中创建PWM输入捕获相关变量
/*main.c*/
uint32_t R39_Freq=0,R39_Duty=0;//定义R39的频率和周期
uint32_t R40_Freq=0,R40_Duty=0;//定义R40的频率和周期使能定时器中断PWM输入捕获,这里需要同时使能TIM3,TIM8的通道1和通道2
/*main.c*/
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_1);//使能通道TIM3的PWM输入捕获通道1
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_2);//使能通道TIM3的PWM输入捕获通道2
HAL_TIM_IC_Start_IT(&htim8, TIM_CHANNEL_1);//使能通道TIM8的PWM输入捕获通道1
HAL_TIM_IC_Start_IT(&htim8, TIM_CHANNEL_2);//使能通道TIM8的PWM输入捕获通道2
PWM输入捕获中断回调函数
在tim.c中编写HAL_TIM_IC_CaptureCallback()回调函数,并在tim.h中声明
/*tim.h*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim);在tim.c声明外部变量并定义中间变量
/*tim.c*/
extern uint32_t R39_Freq,R39_Duty;//定义R39的频率和周期
extern uint32_t R40_Freq,R40_Duty;//定义R40的频率和周期
uint32_t R39_Freq_val=0,R39_Duty_val=0;//定义R39的频率和周期中间值
uint32_t R40_Freq_val=0,R40_Duty_val=0;//定义R40的频率和周期中间值编写PWM输入捕获中断回调函数(详解参考注释)
/*tim.c*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance==TIM3)//选择TIM3
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)//选择TIM3通道1
{
R39_Freq_val=HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_1);//获取周期时间
R39_Freq=1000000/R39_Freq_val;//转换为频率
}
else if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)//选择TIM3通道2
{
R39_Duty_val=HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_2);//获取高电平时间
R39_Duty=100*R39_Duty_val/R39_Freq_val;//计算占空比
}
}
if(htim->Instance==TIM8)//选择TIM8
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)//选择TIM8通道1
{
R40_Freq_val=HAL_TIM_ReadCapturedValue(&htim8, TIM_CHANNEL_1);//获取周期时间
R40_Freq=1000000/R40_Freq_val;//转换为频率
}
else if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_2)//选择TIM8通道2
{
R40_Duty_val=HAL_TIM_ReadCapturedValue(&htim8, TIM_CHANNEL_2);//获取高电平时间
R40_Duty=100*R40_Duty_val/R40_Freq_val;//计算占空比
}
}
}相关函数定义位置stm43g4xx_hal_tim.c中
/*stm43g4xx_hal_tim.c*/
HAL_TIM_IC_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel);
HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim);
HAL_TIM_ReadCapturedValue(TIM_HandleTypeDef *htim, uint32_t Channel);
在Task.c中声明外部变量,就可以获取PWM输入捕获所获取的频率和周期啦!
/*Task.c*/
extern uint32_t R39_Freq,R39_Duty;//定义R39的频率和周期
extern uint32_t R40_Freq,R40_Duty;//定义R40的频率和周期4.工程文件
该工程文件为全10讲所有内容,可以作为参考,不过还是希望读者能够自己手敲一遍,加深记忆
链接:https://pan.baidu.com/s/1LcNszc7_oHWvXcucCezlxg?pwd=hw07
提取码:hw07

自己做的笔记,也希望能对你有帮助!