MATLAB模糊控制器
说明:以下例子均来自此书——《MATLAB/Simulink系统仿真超级学习手册》石良臣 matlab2018a ,仅作为读书笔记。
1、
2、

系统结构显示区:显示系统的输入输出个数以及模糊规则条数。
模糊逻辑区:显示并可编辑模糊逻辑预算、模糊推理、聚合和反模糊化方法。
3、菜单栏
4、


5、编辑FIS的维数。

6、编辑FIS输入输出变量的名称

7、编辑FIS的名称
方法一:File——Export——To Workspace ,(暂时将FIS保存于工作空间,在命名)。
方法二:File——Export——To File,(将FIS保存至文件,这种方式不易丢失数据)。

8、编辑模糊逻辑推理的具体算法。
(1)Mamdani型

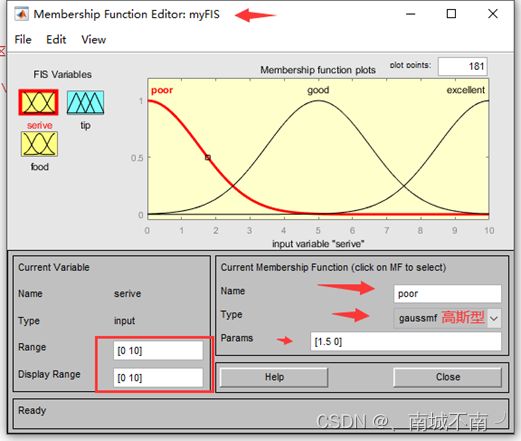
二、隶属函数编辑器
1、MF编辑器界面介绍


2、Mamdani型MF编辑
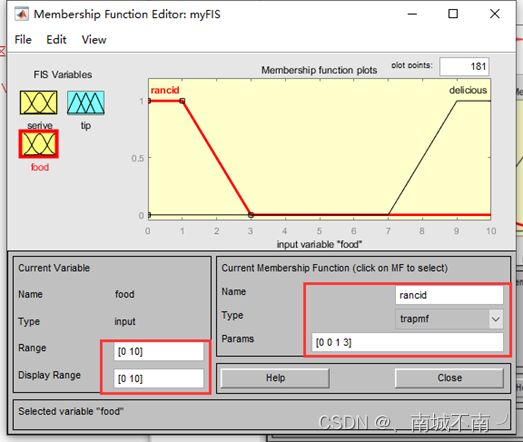
(1)编辑输入变量的论域和显示范围

(2)增加覆盖输入变量模糊子集的数目
方法一:Edit——Add MFs,

方法二:Edit——Add Custom MF

(3)编辑隶属函数曲线
(4)删除模糊子集
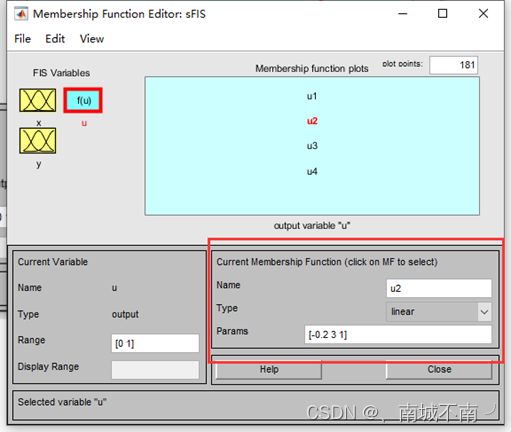
3、Sugeno型MF的编辑
不同:Mamdani型输出的是模糊子集;Sugeno型输出的是线性函数。
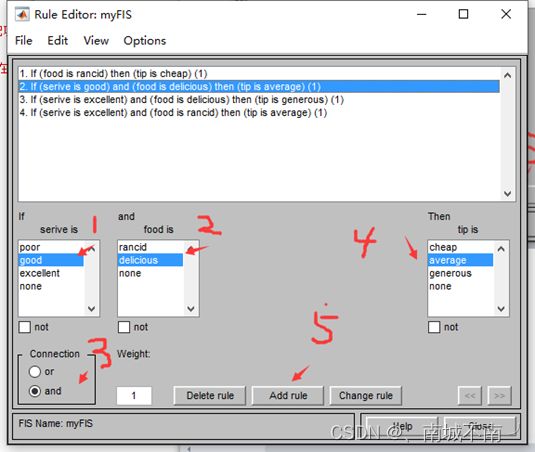
三、模糊规则编辑器
模糊规则就是输入变量和输出变量之间的模糊蕴含关系,编辑模糊规则之前
,必须先完成模糊系统的结构、模糊推理的类型和输入变量的模糊化编辑。
1、Rule编辑器界面简介

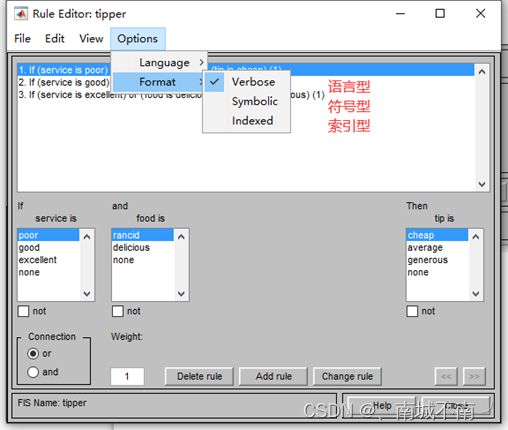

2、模糊规则的格式
(1)语言型
每行末尾必须写上(p),p在区间[0,1]上,表示该条规则的权重。
例如:

(2)符号型
例如:

(3)索引型

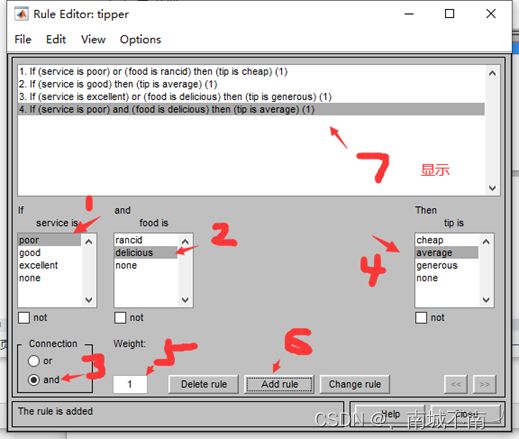
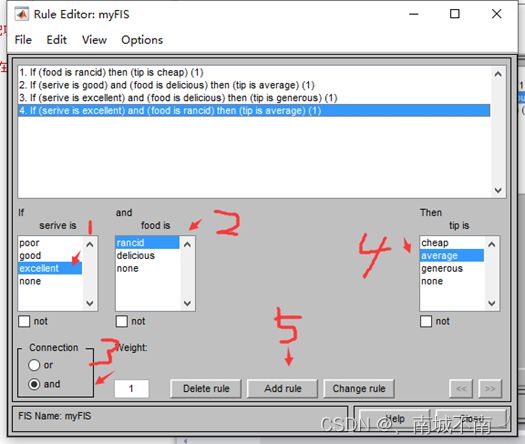
3、模糊规则的编辑
(1)添加模糊规则
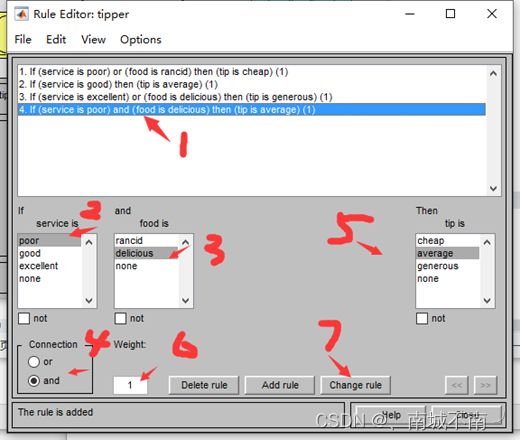
(2)修改模糊规则
(3)删除模糊规则

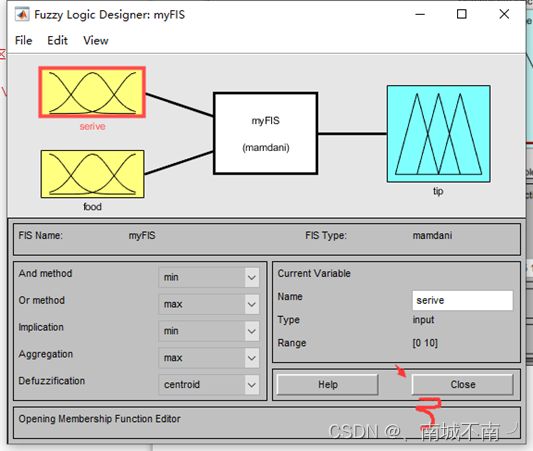
例题11-1
规律:
如果食物难吃,则小费很少;
如果餐厅服务一般但食物好吃,则小费比较接近平均;
如果餐厅服务很好而食物好吃,则小费会很多;
如果餐厅服务很好而食物难吃,则小费比较接近平均。
创建过程:
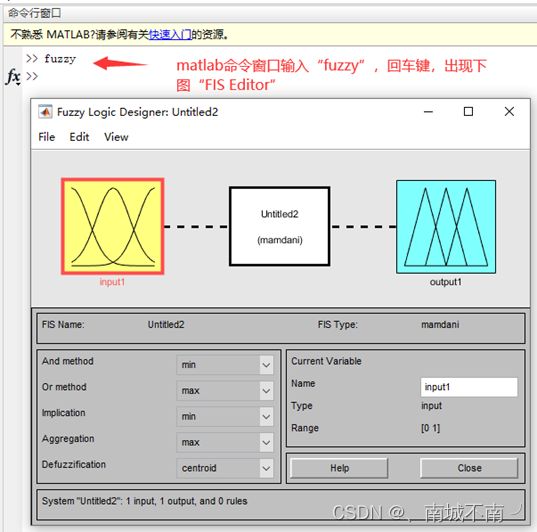
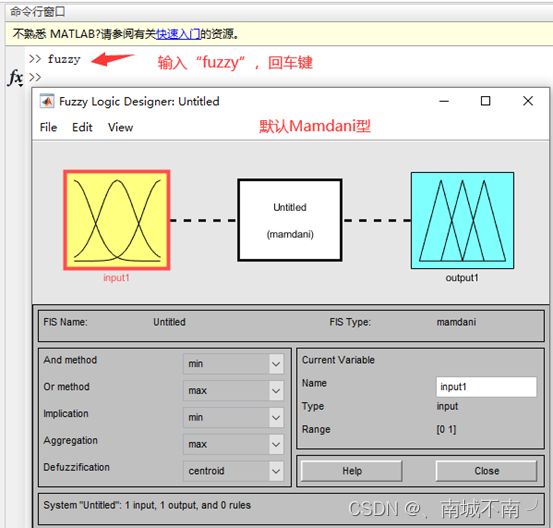
(1)创建一个新的模糊推理系统
在MATLLAB命令窗口中输入fuzzy,按回车键确认。

(2)确定模糊推理系统的结构(默认Mamdani)

(三个都修改名称)

(3)编辑模糊逻辑推理的具体算法(一般默认)

(4)编辑输入、输出变量

(5)编辑模糊规则


(6)退出并保存模糊推理系统




完成。
四、模糊规则观察器
任意编辑器窗口“view”打开。


五、曲面观察器
任意编辑器窗口“view”打开。

当输入变量多余两个时,只能把两个之外的变量取成定值,显示在Ref,Input参量输入右侧的编辑框内,也可以在此编辑框内设置其他变量的取值。
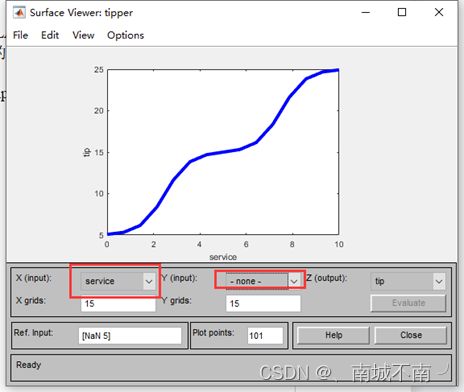
例11-2
利用命令“fuzzy tipper”输出MATLAB自带图像,打开输出变量曲线观察器,分别研究每个输入变量对输出变量的影响。
解:
(1)输入变量service对输出变量tip的影响
在X(input)编辑框内选择service,在Y(input)编辑框内选择-none-,就可以得到tip关于service的关系曲线:
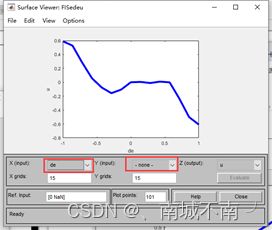
(2)输入变量food对输出变量tip的影响
在X(input)编辑框内选择food,在Y(input)编辑框内选择-none-,就可以得到tip关于food的关系曲线:

六、模糊系统设计实例
当一个系统的内部结构不清楚,无法建立其数学模型时,如果它具有局部线性的特点并能进行分段描述,就可以用Sugeno型模糊进行描述。
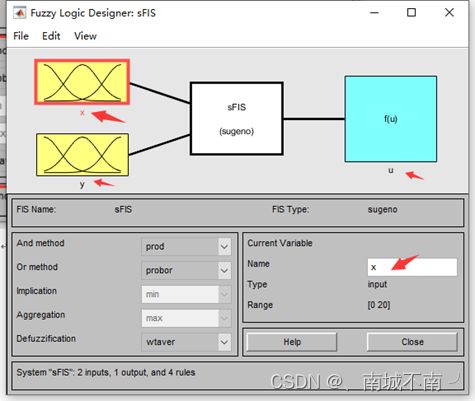
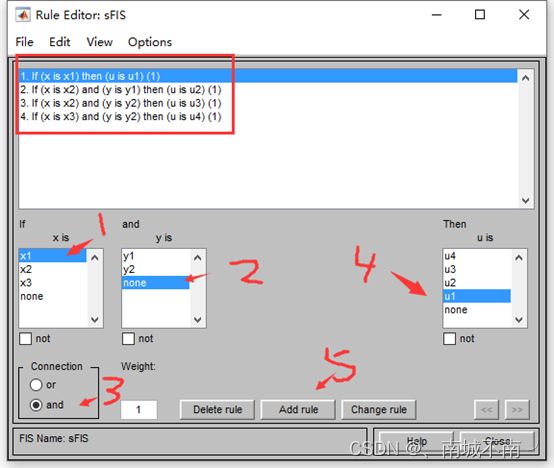
例:11-3一个系统,其输入为x和y,输出为u,根据大量的输入、输出数据,分析得出了四条模糊规则:
Rule: if x is x1 then u=u1=x+0.5;
Rule: if x is x2 and y is y1 then u=u2=-0.2x+3y+1;
Rule: if x is x2 and y is y2 then u=u3=0.3x+0.4y+5;
Rule: if x is x3 and y is y3 then u=u4=0.7x+0.1y-0.6;
输入变量x∈[0,20],y∈[-5,15],x1,x2,x3为涵盖输入变量x论域的模糊子集,y1,y2为涵盖输入变量y论域的模糊子集。
解:
(1)创建一个新的模糊推理系统
(2)确定模糊系统的结构


(3)编辑模糊逻辑推理的具体算法

(4)编辑输入、输出变量
双击输入输出变量x1

X2

X3

Y1

Y2

U1

U2
U3

U4

(5)编辑模糊规则
(6)观察模糊推理过程
由于本例中没有用到OR或方法,所以它对输出结果没有影响。而另外两个模糊逻辑推理算法的不同会导致输出结果大不相同。
(7)观察整个论域上输出变量与输入变量之间的关系


七、11.4模糊控制系统仿真
1、MATLAB函数
(1)打开模糊推理系统GUI的函数
(2)对FIS进行操作的函数
2、FIS与模糊逻辑控制器连接
(1)把FIS导入工作空间
如:sFIS=readfis(‘sFIS’)
如:readfis——回车——选中文件。
如:

(2)将FIS嵌入模糊控制器模块


3、模糊控制系统仿真的基本步骤:
(1)创建FIS文件;
(2)建立FIS文件与模糊控制器的连接;
(3)构建模糊控制系统的仿真模型;
(4)进行系统仿真。
八、构建模糊控制系统仿真模型的方法,并对仿真模型进行仿真。
例11-4一智能仿生人工腿中的执行电机传递函数可表示为
G(s)=6068s(s2+110s+6068)
试建立其闭环系统,并比较PID控制器与模糊控制器对闭环系统的控制性能。
解:
1、建立模糊逻辑控制系统
(1)在MATLAB命令窗口中输入fuzzy,创建一个新的FIS(Mamdani型)。

(2)编辑输入、输出变量
以闭环系统误差e及其de为两个输入变量,被控对象的控制输入u为输出变量。考虑到控制目标为跟踪单位阶跃信号,则e的论域为[-1,1],de的论域为[-1,1]。同时为了满足控制输入的上界限制,取u的论域为[-2,2].。



(3)制定、编辑模糊规则
当误差e为NB负大时,无论误差率de如何,控制输入都应该为NB负大,以尽快减小误差。
所以有规则Rule1: if e is NB then u is NB。
当误差e为NS负小时,就要考虑误差率的影响。如果de为NB负大,会导致e更负,所以控制输入仍然应该为NB负大;如果de为ZE零或PS正小,则需要较小的控制输入以帮助误差e恢复至零;如果de为PB正大,则不怎么需要控制输入。所以有下面的规则。
Rule2:if e is NS and de is NB then u is NB。
Rule3:if e is NS and de is NS then u is NB。
Rule4:if e is NS and de is ZE then u is NS。
Rule5:if e is NS and de is PS then u is NS。
Rule6:if e is NS and de is PB then u is ZE。
当误差e接近于零,即为ZE时,主要矛盾集中于稳定性,这时较小的控制输入会更加适合小幅度的调整,所以有下面的规则。
Rule7:if e is ZE and de is NB then u is PS。
Rule8:if e is ZE and de is NS then u is ZE。
Rule9:if e is ZE and de is ZE then u is ZE。
Rule10:if e is ZE and de is PS then u is ZE。
Rulell:if e is ZE and de is PB then u is NS。
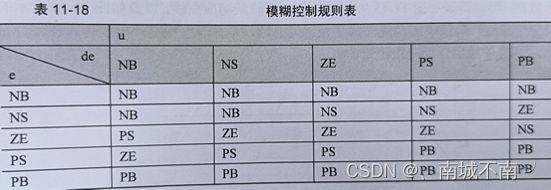
对称地可以得出余下的6条规则,表11-18为模糊控制规则表。

(4)导入工作空间

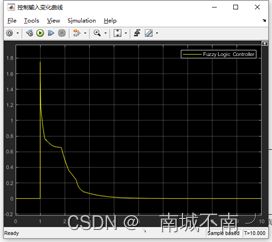
(5)建立仿真模型


运行仿真,阶跃响应曲线非常平稳,没有超调量,没有振荡,效果比较好。

2、利用PID控制器建立仿真模型

根据Ziegler-Nichols调参方法,可以确定出一组PID参数:P=66、I=66/0.0403、D=66*0.0101、N=100,这组参数使得闭环系统稳定。

运行仿真,虽然系统较快地趋于稳定,但产生了多次振荡,超调量很大,且控制输入也较大,不合符实际需求。


3、对被控对象加入随机干扰,再次建立模糊逻辑控制系统。

运行仿真,由于随机扰动的加入,响应曲线会一直处于波动状态,但基本稳定在1附近,这说明模糊逻辑控制器有一定的干扰抑制作用。


4、Rule观察器

5、Surface观察器


八、MATLAB自带模糊控制系统实例


(结构文件列表)核心:tank=readfis(‘tank’)
FIS由五个部分组成,即FIS编辑器、隶属函数编辑器、模糊规则编辑器、模糊规则观察器、曲面观察器。