操作系统八股文知识点总结
1. 内存管理篇
1.1 虚拟内存

- 代码段:存放在二进制文件中的机器码
- 数据段:存放已经初始化的全局变量和静态变量
- BSS段:存放未出实话的全局变量和静态变量
- 堆:用于动态申请内存
- 匿名映射区:存放动态链接库以及内存映射区域
- 栈:存放函数调用过程中的局部变量和函数参数
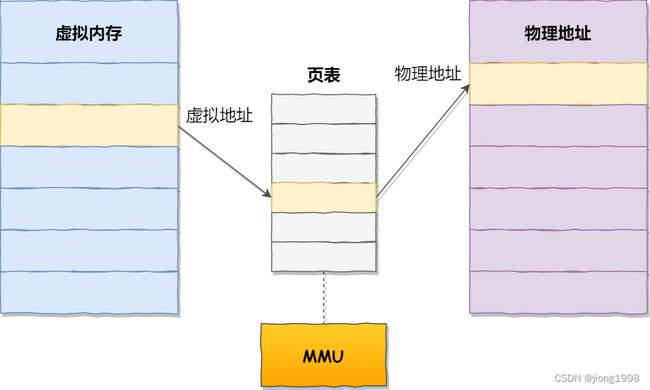
我们可以把进程所使用的地址「隔离」开来,即让操作系统为每个进程分配独立的一套「虚拟地址」,人人都有,大家自己玩自己的地址就行,互不干涉。但是有个前提每个进程都不能访问物理地址,操作系统会提供一种机制,将不同进程的虚拟地址和不同内存的物理地址映射起来,而这种机制对进程来说是透明的,操作系统已经把这些都安排的明明白白了。
如果程序要访问虚拟地址的时候,由操作系统转换成不同的物理地址,这样不同的进程运行的时候,写入的是不同的物理地址,这样就不会冲突了。
于是,这里就引出了两种地址的概念:
- 我们程序所使用的内存地址叫做虚拟内存地址
- 实际存在硬件里面的空间地址叫物理内存地址
操作系统引入了虚拟内存,进程持有的虚拟地址会通过 CPU 芯片中的内存管理单元(MMU)的映射关系,来转换变成物理地址,然后再通过物理地址访问内存,如下图所示:

虚拟内存有什么作用?
- 第一,虚拟内存可以使得进程对运行内存超过物理内存大小,因为程序运行符合局部性原理,CPU 访问内存会有很明显的重复访问的倾向性,对于那些没有被经常使用到的内存,我们可以把它换出到物理内存之外,比如硬盘上的 swap 区域。
- 第二,由于每个进程都有自己的页表,所以每个进程的虚拟内存空间就是相互独立的。进程也没有办法访问其他进程的页表,所以这些页表是私有的,这就解决了多进程之间地址冲突的问题。
- 第三,页表里的页表项中除了物理地址之外,还有一些标记属性的比特,比如控制一个页的读写权限,标记该页是否存在等。在内存访问方面,操作系统提供了更好的安全性。
操作系统是如何管理虚拟地址与物理地址之间的关系?
主要有两种方式,分别是内存分段和内存分页。
1.2.1 分段
分段机制下的虚拟地址由两部分组成,段选择因子和段内偏移量。段选择因子最重要的就是段号(也可以直接把段选择因子认为是段号)。整体流程如下图所示

段选择因子和段内偏移量:
- 段选择子就保存在段寄存器里面。段选择子里面最重要的是段号,用作段表的索引。段表里面保存的是这个段的基地址、段的界限和特权等级等。
- 虚拟地址中的段内偏移量应该位于 0 和段界限之间,如果段内偏移量是合法的,就将段基地址加上段内偏移量得到物理内存地址。
内存分段回产生外部碎片吗?
内存分段管理可以做到段根据实际需求分配内存,所以有多少需求就分配多大的段,所以不会出现内部内存碎片。
但是由于每个段的长度不固定,所以多个段未必能恰好使用所有的内存空间,会产生了多个不连续的小物理内存,导致新的程序无法被装载,所以会出现外部内存碎片的问题。
可以通过内存交换来解决外部内存碎片。具体来说可以把音乐程序占用的那 256MB 内存写到硬盘上,然后再从硬盘上读回来到内存里。不过再读回的时候,我们不能装载回原来的位置,而是紧紧跟着那已经被占用了的 512MB 内存后面。这样就能空缺出连续的 256MB 空间,于是新的 200MB 程序就可以装载进来。
这个内存交换空间,在 Linux 系统里,也就是我们常看到的 Swap 空间,这块空间是从硬盘划分出来的,用于内存与硬盘的空间交换。
对于多进程的系统来说,用分段的方式,外部内存碎片是很容易产生的,产生了外部内存碎片,那不得不重新 Swap 内存区域,这个过程会产生性能瓶颈。
为了解决内存分段的「外部内存碎片和内存交换效率低」的问题,就出现了内存分页。
1.2.2 分页
分页是把整个虚拟和物理内存空间切成一段段固定尺寸的大小。这样一个连续并且尺寸固定的内存空间,我们叫页(Page)。在 Linux 下,每一页的大小为 4KB。
虚拟地址与物理地址之间通过页表来映射,如下图:
而当进程访问的虚拟地址在页表中查不到时,系统会产生一个缺页异常,进入系统内核空间分配物理内存、更新进程页表,最后再返回用户空间,恢复进程的运行。
如果内存空间不够,操作系统会把其他正在运行的进程中的「最近没被使用」的内存页面给释放掉,也就是暂时写在硬盘上,称为换出(Swap Out)。一旦需要的时候,再加载进来,称为换入(Swap In)。所以,一次性写入磁盘的也只有少数的一个页或者几个页,不会花太多时间,内存交换的效率就相对比较
更进一步地,分页的方式使得我们在加载程序的时候,不再需要一次性都把程序加载到物理内存中。我们完全可以在进行虚拟内存和物理内存的页之间的映射之后,并不真的把页加载到物理内存里,而是只有在程序运行中,需要用到对应虚拟内存页里面的指令和数据时,再加载到物理内存里面去。
缺陷:
在 32 位的环境下,虚拟地址空间共有 4GB,假设一个页的大小是 4KB(2^12),那么就需要大约 100 万 (2^20) 个页,每个「页表项」需要 4 个字节大小来存储,那么整个 4GB 空间的映射就需要有 4MB 的内存来存储页表。
这 4MB 大小的页表,看起来也不是很大。但是要知道每个进程都是有自己的虚拟地址空间的,也就说都有自己的页表。
那么,100 个进程的话,就需要 400MB 的内存来存储页表,这是非常大的内存了,更别说 64 位的环境了。
所以解决上面的问题,就要采用多级页表
1.2.3 段页式内存管理
内存分段和内存分页并不是对立的,它们是可以组合起来在同一个系统中使用的,那么组合起来后,通常称为段页式内存管理。
段页式内存管理实现的方式:
- 先将程序划分为多个有逻辑意义的段,也就是前面提到的分段机制;
- 接着再把每个段划分为多个页,也就是对分段划分出来的连续空间,再划分固定大小的页;
这样,地址结构就由段号、段内页号和页内位移三部分组成。
用于段页式地址变换的数据结构是每一个程序一张段表,每个段又建立一张页表,段表中的地址是页表的起始地址,而页表中的地址则为某页的物理页号,如图所示:
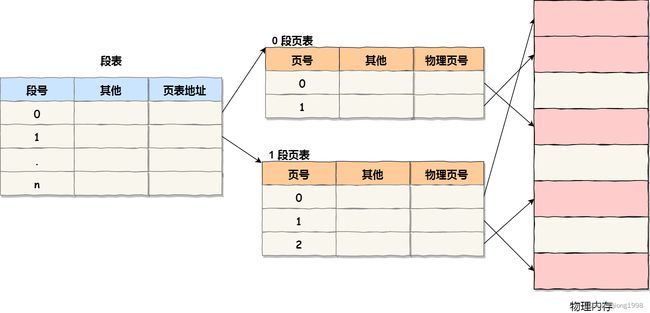
段页式地址变换中要得到物理地址须经过三次内存访问:
- 第一次访问段表,得到页表起始地址;
- 第二次访问页表,得到物理页号;
- 第三次将物理页号与页内位移组合,得到物理地址。
2. Linux的内存布局
Linux采用段页式内存管理:
- 段式内存管理先将逻辑地址映射成线性地址,然后再由页式内存管理将线性地址映射成物理地址
注意:逻辑地址=段内偏移地址
Linux 系统中的每个段都是从 0 地址开始的整个 4GB 虚拟空间(32 位环境下),也就是所有的段的起始地址都是一样的。这意味着,Linux 系统中的代码,包括操作系统本身的代码和应用程序代码,所面对的地址空间都是线性地址空间(虚拟地址),这种做法相当于屏蔽了处理器中的逻辑地址概念,段只被用于访问控制和内存保护
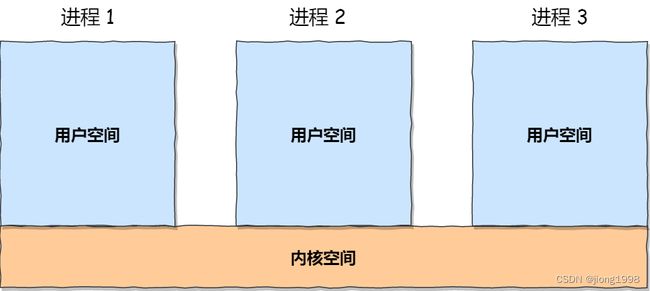
虽然每个进程都各自有独立的虚拟内存, 但是每个虚拟内存中的内核地址,其实关联的都是相同的物理内存。 这样,进程切换到内核态后,就可以很方便地访问内核空间内存。如下图所示:
总结:
为了在多进程环境下,使得进程之间的内存地址不受影响,相互隔离,于是操作系统就为每个进程独立分配一套虚拟地址空间,每个程序只关心自己的虚拟地址就可以,实际上大家的虚拟地址都是一样的,但分布到物理地址内存是不一样的。作为程序,也不用关心物理地址的事情。
每个进程都有自己的虚拟空间,而物理内存只有一个,所以当启用了大量的进程,物理内存必然会很紧张,于是操作系统会通过内存交换技术,把不常使用的内存暂时存放到硬盘(换出),在需要的时候再装载回物理内存(换入)。
内存分段是根据程序的逻辑角度,分成了栈段、堆段、数据段、代码段等,这样可以分离出不同属性的段,同时是一块连续的空间。但是每个段的大小都不是统一的,这就会导致外部内存碎片和内存交换效率低的问题。
于是,就出现了内存分页,把虚拟空间和物理空间分成大小固定的页,如在 Linux 系统中,每一页的大小为 4KB。由于分了页后,就不会产生细小的内存碎片,解决了内存分段的外部内存碎片问题。同时在内存交换的时候,写入硬盘也就一个页或几个页,这就大大提高了内存交换的效率。
再来,为了解决简单分页产生的页表过大的问题,就有了多级页表,它解决了空间上的问题,但这就会导致 CPU 在寻址的过程中,需要有很多层表参与,加大了时间上的开销。于是根据程序的局部性原理,在 CPU 芯片中加入了 TLB,负责缓存最近常被访问的页表项,大大提高了地址的转换速度。
Linux 系统主要采用了分页管理,但是由于 Intel 处理器的发展史,Linux 系统无法避免分段管理。于是 Linux 就把所有段的基地址设为 0,也就意味着所有程序的地址空间都是线性地址空间(虚拟地址),相当于屏蔽了 CPU 逻辑地址的概念,所以段只被用于访问控制和内存保护。
另外,Linux 系统中虚拟空间分布可分为用户态和内核态两部分,其中用户态的分布:代码段、全局变量、BSS、函数栈、堆内存、映射区。
3. 内存分配的过程是怎样的?
应用程序通过 malloc 函数申请内存的时候,实际上申请的是虚拟内存,此时并不会分配物理内存。
当应用程序读写了这块虚拟内存,CPU 就会去访问这个虚拟内存, 这时会发现这个虚拟内存没有映射到物理内存, CPU 就会产生缺页中断,进程会从用户态切换到内核态,并将缺页中断交给内核的 Page Fault Handler (缺页中断函数)处理。
缺页中断处理函数会看是否有空闲的物理内存,如果有,就直接分配物理内存,并建立虚拟内存与物理内存之间的映射关系。
如果没有空闲的物理内存,那么内核就会开始进行回收内存(SWAP机制,得判断是否有开启SWAP机制)的工作,回收的方式主要是两种:直接内存回收和后台内存回收。
- 后台内存回收(kswapd):在物理内存紧张的时候,会唤醒内核线程来回收内存,这个回收内存的过程异步的,不会阻塞进程的执行。
- 直接内存回收(direct reclaim):如果后台异步回收跟不上进程内存申请的速度,就会开始直接回收,这个回收内存的过程是同步的,会阻塞进程的执行。
如果直接内存回收后,空闲的物理内存仍然无法满足此次物理内存的申请,那么内核就会放最后的大招了 ——触发 OOM (Out of Memory,内存溢出)机制。
OOM:机制会根据算法选择一个占用物理内存较高的进程,然后将其杀死,以便释放内存资源,如果物理内存依然不足,OOM Killer 会继续杀死占用物理内存较高的进程,直到释放足够的内存位置。
使用 Swap 机制优点是,应用程序实际可以使用的内存空间将远远超过系统的物理内存。由于硬盘空间的价格远比内存要低,因此这种方式无疑是经济实惠的。当然,频繁地读写硬盘,会显著降低操作系统的运行速率,这也是 Swap 的弊端。
如果在4GB的物理内存上,申请8GB的内存会怎么样?
- 在 32 位操作系统,因为进程最大只能申请 3 GB 大小的虚拟内存,所以直接申请 8G 内存,会申请失败。
- 在 64位 位操作系统,因为进程最大只能申请 128 TB 大小的虚拟内存,即使物理内存只有 4GB,申请 8G 内存也是没问题,因为申请的内存是虚拟内存。如果这块虚拟内存被访问了,要看系统有没有 Swap 分区:
- 如果没有 Swap 分区,因为物理空间不够,进程会被操作系统杀掉,原因是 OOM(内存溢出);
- 如果有 Swap 分区,即使物理内存只有 4GB,程序也能正常使用 8GB 的内存,进程可以正常运行;
4.预读失效与缓存污染
Linux 的 Page Cache 和 MySQL 的 Buffer Pool 的大小是有限的,并不能无限的缓存数据,对于一些频繁访问的数据我们希望可以一直留在内存中,而一些很少访问的数据希望可以在某些时机可以淘汰掉,从而保证内存不会因为满了而导致无法再缓存新的数据,同时还能保证常用数据留在内存中。要实现这个,最容易想到的就是 LRU(最近最久未使用)算法。
LRU实现原理:LRU 算法一般是用「链表」作为数据结构来实现的,链表头部的数据是最近使用的,而链表末尾的数据是最久没被使用的。那么,当空间不够了,就淘汰最久没被使用的节点,也就是链表末尾的数据,从而腾出内存空间。
预读机制:假设应用程序读磁盘A的0-4K(一页)的数据,由于空间局部性原理(靠近当前被访问数据的数据,在未来很大概率会被访问到),应用程序会把0-16K数据都读入内存。因此,预读机制带来的好处就是减少了 磁盘 I/O 次数,提高系统磁盘 I/O 吞吐量。
预读失效:
然而正是由于预读机制,如果这些提前被加载进来的页,并没有被访问,相当于这个预读工作是白做了,那么就是预读失效了。如果还是用传统的LRU算法,系统会把预读页放在LRU链表头部,当内存空间不够时,会把尾部的页淘汰掉。
如果这些「预读页」如果一直不会被访问到,就会出现一个很奇怪的问题,不会被访问的预读页却占用了 LRU 链表前排的位置,而末尾淘汰的页,可能是热点数据,这样就大大降低了缓存命中率 。
如何避免预读失效呢?
最好就是让预读页停留在内存里的时间要尽可能的短,让真正被访问的页才移动到 LRU 链表的头部,从而保证真正被读取的热数据留在内存里的时间尽可能长。
Linux 操作系统和 MySQL Innodb 通过改进传统 LRU 链表来避免预读失效带来的影响,具体的改进分别如下:
- Linux 操作系统实现两个了 LRU 链表:活跃 LRU 链表(active_list)和非活跃 LRU 链表(inactive_list);
- MySQL 的 Innodb 存储引擎是在一个 LRU 链表上划分来 2 个区域:young 区域 和 old 区域。
这两个改进方式,设计思想都是类似的,都是将数据分为了冷数据和热数据,然后分别进行 LRU 算法。不再像传统的 LRU 算法那样,所有数据都只用一个 LRU 算法管理。
以linux为例,具体来说:就是设计两个链表,活跃 LRU 链表和非活跃 LRU 链表。有了这两个 LRU 链表后,预读页就只需要加入到 inactive list 区域的头部,当页被真正访问的时候,才将页插入 active list 的头部。如果预读的页一直没有被访问,就会从 inactive list 移除,这样就不会影响 active list 中的热点数据。
缓存污染
缓存污染:但是如果还是使用只要数据被访问一次,就将数据加入到活跃 LRU 链表头部这种方式的话,那么还存在缓存污染的问题。
如何解决缓存污染:正是由于LRU算法数据只要被访问一次,就加入活跃LRU链表(门槛太低),所以才会容易导致缓存污染。解决办法很简单:只要我们提高进入到活跃 LRU 链表的门槛,就能有效地保证活跃 LRU 链表里的热点数据不会被轻易替换掉。
因此在批量读取数据时候,如果这些大量数据只会被访问一次,那么它们就不会进入到活跃 LRU 链表,也就不会把热点数据淘汰,只会待在非活跃 LRU 链表中,后续很快也会被淘汰。
2. 进程管理篇
2.1锁的基本介绍
1 互斥锁与自旋锁
当已经有一个线程加锁后,其他线程加锁则就会失败,互斥锁和自旋锁对于加锁失败后的处理方式是不一样的:
- 互斥锁加锁失败后,线程会释放 CPU ,给其他线程;
- 自旋锁加锁失败后,线程会忙等待,直到它拿到锁;
互斥锁
对于互斥锁加锁失败而阻塞的现象,是由操作系统内核实现的。所以,互斥锁加锁失败时,会从用户态陷入到内核态,让内核帮我们切换线程,虽然简化了使用锁的难度,但是存在一定的性能开销成本:两次线程上下文切换的成本:。
- 当线程加锁失败时,内核会把线程的状态从「运行」状态设置为「睡眠」状态,然后把 CPU 切换给其他线程运行;
- 接着,当锁被释放时,之前「睡眠」状态的线程会变为「就绪」状态,然后内核会在合适的时间,把 CPU 切换给该线程运行。
注:线程的上下文切换:当两个线程是属于同一个进程,因为虚拟内存是共享的,所以在切换时,虚拟内存这些资源就保持不动,只需要切换线程的私有数据、寄存器等不共享的数据。
自旋锁:自旋锁是通过 CPU 提供的 CAS 函数(Compare And Swap),在「用户态」完成加锁和解锁操作,不会主动产生线程上下文切换,所以相比互斥锁来说,会快一些,开销也小一些。
注意:自旋锁与互斥锁使用层面比较相似,但实现层面上完全不同:当加锁失败时,互斥锁用「线程切换」来应对,自旋锁则用「忙等待」来应对
2 读写锁
读写锁由读锁和写锁两部分构成,如果只读取共享资源用读锁,如果修改共享资源用写锁。
读写锁工作原理:
- 当没有加写锁时,多个线程能够并发的读共享资源,并同时加读锁。大大提高共享资源的访问效率
- 当加了写锁后,读线程会被阻塞,其他写线程也会被阻塞。即写锁是独占锁,任何时刻只能有一个线程写共享资源。
3 乐观锁与悲观锁
悲观锁:它认为多线程同时修改共享资源概率比较高,于是很容易出现冲突,所以在每次访问资源前,需要先加锁
乐观锁:它认为多线程同时修改共享资源概率比较低,所以先修改完资源,再验证这段时间内是否有其他线程同时修改这个资源(一般通过版本号判断是否冲突),如果没有的话,那么操作完成,否则,放弃本次操作。 可见,乐观锁全程没有加锁。
注:放弃后如何重试,这跟业务场景息息相关,虽然重试的成本很高,但是冲突的概率足够低的话,还是可以接受的。