Esp8266,L298N手机遥控车
文章目录
-
- 1.前言
- 2.资料
-
- 2.1原理图
- 2.2程序源码
- 2.3 APP下载
- 3. 原视频信息
1.前言
这个是从YouTube上搬运来的,如图所示

2.资料
2.1原理图
1.因为单片机提供的电流不足以驱动电机,所以需要驱动电路,也就是L298N;
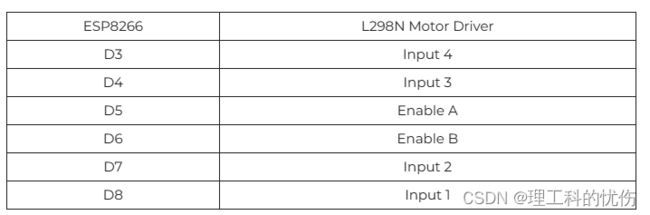
2.接线图如下图和表格所示,其中9V电池可以用3.3V的;
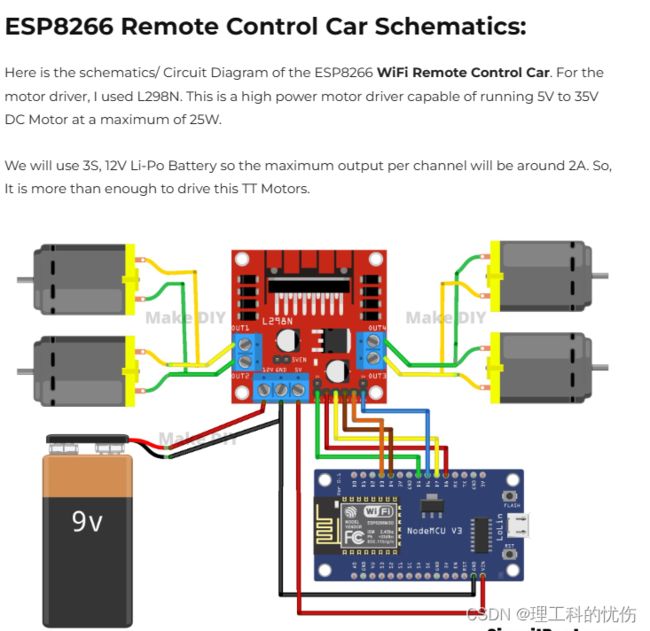
对应接线图
2.2程序源码
/*
Code Name: Arduino Wifi Control Car
Code URI: https://circuitbest.com/category/arduino-projects/
Additional Board Manager URL: http://arduino.esp8266.com/stable/package_esp8266com_index.json
Install: ESP8266 by ESP8266 Community
Author: Make DIY
Author URI: https://circuitbest.com/author/admin/
Description: This program is used to control a robot using a app
that communicates with Arduino through a ESP8266 Module.
App URI: https://drive.google.com/file/d/1pvtWsTeXhcJdpHMfGlFmbGDuH7eoLfoP/view?usp=sharing
Version: 2.0
License: Remixing or Changing this Thing is allowed. Commercial use is not allowed.
*/
#define ENA 14 // Enable/speed motors Right GPIO14(D5)
#define ENB 12 // Enable/speed motors Left GPIO12(D6)
#define IN_1 15 // L298N in1 motors Rightx GPIO15(D8)
#define IN_2 13 // L298N in2 motors Right GPIO13(D7)
#define IN_3 2 // L298N in3 motors Left GPIO2(D4)
#define IN_4 0 // L298N in4 motors Left GPIO0(D3)
#include
#include
#include
String command; //String to store app command state.
int speedCar = 800; // 400 - 1023.
int speed_Coeff = 3;
const char* ssid = "Make DIY";
ESP8266WebServer server(80);
void setup() {
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN_1, OUTPUT);
pinMode(IN_2, OUTPUT);
pinMode(IN_3, OUTPUT);
pinMode(IN_4, OUTPUT);
Serial.begin(115200);
// Connecting WiFi
WiFi.mode(WIFI_AP);
WiFi.softAP(ssid);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
// Starting WEB-server
server.on ( "/", HTTP_handleRoot );
server.onNotFound ( HTTP_handleRoot );
server.begin();
}
void goAhead(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goBack(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goRight(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goLeft(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goAheadRight(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar);
}
void goAheadLeft(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, HIGH);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, HIGH);
analogWrite(ENB, speedCar/speed_Coeff);
}
void goBackRight(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar/speed_Coeff);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void goBackLeft(){
digitalWrite(IN_1, HIGH);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, HIGH);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar/speed_Coeff);
}
void stopRobot(){
digitalWrite(IN_1, LOW);
digitalWrite(IN_2, LOW);
analogWrite(ENA, speedCar);
digitalWrite(IN_3, LOW);
digitalWrite(IN_4, LOW);
analogWrite(ENB, speedCar);
}
void loop() {
server.handleClient();
command = server.arg("State");
if (command == "F") goAhead();
else if (command == "B") goBack();
else if (command == "L") goLeft();
else if (command == "R") goRight();
else if (command == "I") goAheadRight();
else if (command == "G") goAheadLeft();
else if (command == "J") goBackRight();
else if (command == "H") goBackLeft();
else if (command == "0") speedCar = 400;
else if (command == "1") speedCar = 470;
else if (command == "2") speedCar = 540;
else if (command == "3") speedCar = 610;
else if (command == "4") speedCar = 680;
else if (command == "5") speedCar = 750;
else if (command == "6") speedCar = 820;
else if (command == "7") speedCar = 890;
else if (command == "8") speedCar = 960;
else if (command == "9") speedCar = 1023;
else if (command == "S") stopRobot();
}
void HTTP_handleRoot(void) {
if( server.hasArg("State") ){
Serial.println(server.arg("State"));
}
server.send ( 200, "text/html", "" );
delay(1);
}
2.3 APP下载
https://wwdy.lanzouf.com/ibIId0s6mnhc
密码:d5k6
3. 原视频信息
https://www.youtube.com/watch?v=o_AvH5nuwLg