拟牛顿法
拟牛顿法
文章目录
- 拟牛顿法
-
- 差分近似微分的思想
- 秩一近似(SR1)
-
- 秩1近似的迭代流程
- SR1算法的优缺点
- 秩2算法(DFP)
-
- DFP算法的性质
- 优缺点:
- BFGS算法
-
- Sherman-Morrison Formula公式
- 迭代过程
- BFGS的性质
- 优缺点
- 代码示例
-
- 代码总览
- 确定步长算法
- 迭代B算法(三种拟牛顿法)
- 检查输入
- 测试用例
- 声明
- 参考
拟牛顿法是除共轭方向法外,解决非二次型求极小值的另一种有效方法。
差分近似微分的思想
我们在二次型牛顿法中,为了不计算二阶导,减少计算量,我们采用了差分近似微分的思想,那么在多次方函数中,是否也可以推广这个思想呢?
f ′ ′ ( x k ) = f ′ ( x k ) − f ′ ( x k − 1 ) x k − x k − 1 ↓ H k + 1 ≈ F k + 1 = Δ g k Δ x k f^{''}(x_k)= \frac{f^{'}(x_{k})-f^{'}(x_{k-1})}{x_k-x_{k-1}}\\ \downarrow\\ H_{k+1}\approx F_{k+1} = \frac{\Delta g_k}{\Delta x_k} f′′(xk)=xk−xk−1f′(xk)−f′(xk−1)↓Hk+1≈Fk+1=ΔxkΔgk
由于 Δ g k 和 Δ x k \Delta g_k和\Delta x_k Δgk和Δxk都是向量,但是向量之间是没有除法的,所以做以下转换
F k + 1 Δ x k = Δ g k F_{k+1}\Delta x_k = \Delta g_k\\ Fk+1Δxk=Δgk
又因为我们多维牛顿法想要得到的并不是黑塞矩阵本身,而是黑塞矩阵的逆,所以我们做如下变换
F k + 1 − 1 Δ g k = Δ x k B k + 1 = F k + 1 − 1 B k + 1 Δ g k = Δ x k . . . ( 1 ) F_{k+1}^{-1}\Delta g_k = \Delta x_k\\ B_{k+1} = F_{k+1}^{-1}\\ B_{k+1}\Delta g_k = \Delta x_k ...(1) Fk+1−1Δgk=ΔxkBk+1=Fk+1−1Bk+1Δgk=Δxk...(1)
这样子我们就得到了一个差分近似需要满足的条件,那么我们如何构建B来满足这样子的条件呢。下面介绍其中一种方法
秩一近似(SR1)
首先假设如果我们有两个向量a和b,我们将 a ∗ b T a*b^T a∗bT的形式称为外积。
那么我们是否可以采用迭代的方式来生成B矩阵呢?
B k + 1 = B k + α k z k z k T . . . ( 2 ) B_{k+1} = B_k + \alpha_kz_kz_k^T...(2) Bk+1=Bk+αkzkzkT...(2)
并且假设z向量
z = [ a 1 a 2 a 3 ] ⟶ z ∗ z T = [ a 1 2 a 1 a 2 a 1 a 3 a 2 a 1 a 2 2 a 2 a 3 a 3 a 1 a 3 a 2 a 3 2 ] z = \begin{bmatrix} a_1\\a_2\\a_3 \end{bmatrix} \longrightarrow z*z^T = \begin{bmatrix} a_1^2 & a_1a_2 &a_1a_3\\ a_2a_1 & a_2^2 & a_2a_3\\ a_3a_1 & a_3a_2 & a_3^2 \end{bmatrix} z=⎣⎡a1a2a3⎦⎤⟶z∗zT=⎣⎡a12a2a1a3a1a1a2a22a3a2a1a3a2a3a32⎦⎤
发现 z ∗ z T z*z^T z∗zT得到的矩阵是对称并且正定的,符合H矩阵的要求,所以我们可以用外积的形式来迭代得到B矩阵
现在我们的任务就是求出 z k z_k zk。
将(2)代入(1)中可得
( B k + α k z k z k T ) Δ g k = Δ x k B k ∗ Δ g k + α k z k z k T Δ g k = Δ x k . . . ( 3 ) (B_k + \alpha_kz_kz_k^T)\Delta g_k = \Delta x_k\\ B_k* \Delta g_k + \alpha_kz_kz_k^T\Delta g_k = \Delta x_k...(3) (Bk+αkzkzkT)Δgk=ΔxkBk∗Δgk+αkzkzkTΔgk=Δxk...(3)
其中 z k T Δ g k z_k^T\Delta g_k zkTΔgk是一个标量,所以可以得到
z k = 1 α K Δ x k − B k ∗ Δ g k z k T Δ g k ↓ α k z k z k T = α k ( 1 α K z k T Δ g k ) 2 ( Δ x k − B k ∗ Δ g k ) ( Δ x k − B k ∗ Δ g k ) T ( 4 ) z_k =\frac1{\alpha_K}\frac{\Delta x_k - B_k* \Delta g_k}{z_k^T\Delta g_k}\\\downarrow\\\alpha_kz_kz^T_k = \alpha_k(\frac1{\alpha_Kz_k^T\Delta g_k})^2(\Delta x_k - B_k* \Delta g_k)(\Delta x_k - B_k* \Delta g_k)^T\\ (4) zk=αK1zkTΔgkΔxk−Bk∗Δgk↓αkzkzkT=αk(αKzkTΔgk1)2(Δxk−Bk∗Δgk)(Δxk−Bk∗Δgk)T(4)
由上面的(3)等式两边左乘以 Δ g k T \Delta g^T_k ΔgkT可以继续推导
B k ∗ Δ g k + α k z k z k T Δ g k = Δ x k Δ g k T ( B k ∗ Δ g k + α k z k z k T Δ g k ) = Δ g k T Δ x k Δ g k T B k ∗ Δ g k + α k Δ g k T z k z k T Δ g k = Δ g k T Δ x k B_k* \Delta g_k + \alpha_kz_kz_k^T\Delta g_k = \Delta x_k\\ \Delta g^T_k (B_k* \Delta g_k + \alpha_kz_kz_k^T\Delta g_k) =\Delta g^T_k \Delta x_k \\ \Delta g^T_k B_k* \Delta g_k +\alpha_k \Delta g^T_kz_kz_k^T\Delta g_k = \Delta g^T_k \Delta x_k Bk∗Δgk+αkzkzkTΔgk=ΔxkΔgkT(Bk∗Δgk+αkzkzkTΔgk)=ΔgkTΔxkΔgkTBk∗Δgk+αkΔgkTzkzkTΔgk=ΔgkTΔxk
因为 Δ g k T z k 和 z k T Δ g k \Delta g^T_kz_k和z_k^T\Delta g_k ΔgkTzk和zkTΔgk都是标量,所以:
Δ g k T B k ∗ Δ g k + α k ( z k T Δ g k ) 2 = Δ g k T Δ x k α k ( z k T Δ g k ) 2 = Δ g k T Δ x k − Δ g k T B k ∗ Δ g k \Delta g^T_k B_k* \Delta g_k + \alpha_k(z^T_k\Delta g_k)^2 = \Delta g^T_k \Delta x_k\\ \alpha_k(z^T_k\Delta g_k)^2 = \Delta g^T_k \Delta x_k - \Delta g^T_k B_k* \Delta g_k ΔgkTBk∗Δgk+αk(zkTΔgk)2=ΔgkTΔxkαk(zkTΔgk)2=ΔgkTΔxk−ΔgkTBk∗Δgk
将得到的式子代入(4)中,可以得到
B k + 1 = B k + ( Δ x k − B k ∗ Δ g k ) ( Δ x k − B k ∗ Δ g k ) T Δ g k T Δ x k − Δ g k T B k ∗ Δ g k B_{k+1} =B_k + \frac{(\Delta x_k - B_k* \Delta g_k)(\Delta x_k - B_k* \Delta g_k)^T}{\Delta g^T_k \Delta x_k - \Delta g^T_k B_k* \Delta g_k} Bk+1=Bk+ΔgkTΔxk−ΔgkTBk∗Δgk(Δxk−Bk∗Δgk)(Δxk−Bk∗Δgk)T
得到的这个式子就是B最后的迭代式啦,这个式子主需要计算一些矩阵和向量相乘,以及一些向量的外积,不用求黑塞矩阵,也不用求逆,计算量并不是很大。
秩1近似的迭代流程
-
初始点:B0 = I(单位矩阵)
-
迭代关系
d k = − H − 1 g = − B k g k α k = a r g m i n Φ ( α ) ( 一 维 线 性 搜 索 ) x k + 1 = x k + α k d k B k + 1 = B k + ( Δ x k − B k ∗ Δ g k ) ( Δ x k − B k ∗ Δ g k ) T Δ g k T Δ x k − Δ g k T B k ∗ Δ g k d_k = -H^{-1}g = -B_kg_k\\ \alpha_k = argmin\Phi(\alpha)(一维线性搜索)\\ x_{k+1} = x_k + \alpha_kd_k\\ B_{k+1} =B_k + \frac{(\Delta x_k - B_k* \Delta g_k)(\Delta x_k - B_k* \Delta g_k)^T}{\Delta g^T_k \Delta x_k - \Delta g^T_k B_k* \Delta g_k} dk=−H−1g=−Bkgkαk=argminΦ(α)(一维线性搜索)xk+1=xk+αkdkBk+1=Bk+ΔgkTΔxk−ΔgkTBk∗Δgk(Δxk−Bk∗Δgk)(Δxk−Bk∗Δgk)T
SR1算法的优缺点
- 优点:可以避免大量的计算
- 缺点:
- 迭代过程B不一定都是正定的
- 除0问题:分母可能接近0
秩2算法(DFP)
针对上面秩1矩阵的缺点,对秩1矩阵进行了改进。
B k + 1 = B k + Δ x k Δ x k T Δ g k T Δ x k − ( B k Δ g K ) ( B k Δ g K ) T Δ g k T B k Δ g k B_{k+1} = B_k + \frac{\Delta x_k \Delta x_k^T}{\Delta g_k^T\Delta x_k} -\frac{(B_k\Delta g_K)(B_k\Delta g_K)^T}{\Delta g_k^TB_k\Delta g_k} Bk+1=Bk+ΔgkTΔxkΔxkΔxkT−ΔgkTBkΔgk(BkΔgK)(BkΔgK)T
DFP算法的性质
-
DFP也是一个拟牛顿算法
证明:
-
DFP也是共轭方向法,即DFP找到的方向是共轭的
优缺点:
- 优点:迭代过程保持正定
- 缺点:不能避免奇异矩阵情形,如果出现奇异矩阵,导致算法无法继续前进
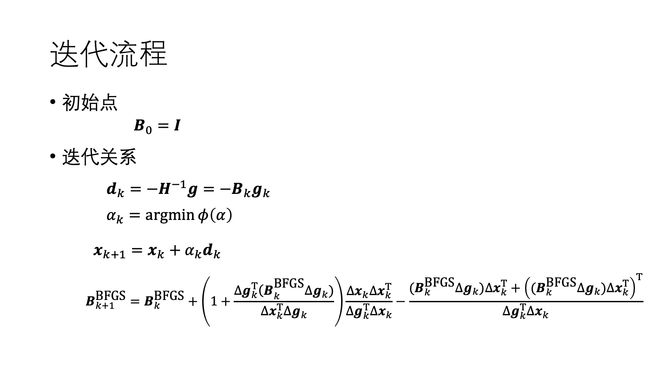
BFGS算法
B k + 1 = B k + Δ x k Δ x k T Δ g k T Δ x k − ( B k Δ g K ) ( B k Δ g K ) T Δ g k T B k Δ g k B_{k+1} = B_k + \frac{\Delta x_k \Delta x_k^T}{\Delta g_k^T\Delta x_k} -\frac{(B_k\Delta g_K)(B_k\Delta g_K)^T}{\Delta g_k^TB_k\Delta g_k} Bk+1=Bk+ΔgkTΔxkΔxkΔxkT−ΔgkTBkΔgk(BkΔgK)(BkΔgK)T
根据对偶定理可得
F k + 1 = F k + Δ g k Δ g k T Δ x k T Δ g k − ( F k Δ x K ) ( F k Δ x K ) T Δ x k T F k Δ x k . . . ( 5 ) F_{k+1} = F_k + \frac{\Delta g_k \Delta g_k^T}{\Delta x_k^T\Delta g_k} -\frac{(F_k\Delta x_K)(F_k\Delta x_K)^T}{\Delta x_k^TF_k\Delta x_k}...(5) Fk+1=Fk+ΔxkTΔgkΔgkΔgkT−ΔxkTFkΔxk(FkΔxK)(FkΔxK)T...(5)
其中 F = B − 1 F = B^{-1} F=B−1
Sherman-Morrison Formula公式
这是一个
( A + u v T ) − 1 = A − 1 − ( A − 1 u ) ( v T A − 1 ) 1 + v T A − 1 u (A + uv^T)^{-1} = A^{-1} - \frac{(A^{-1}u)(v^TA^{-1})}{1+v^TA^{-1}u} (A+uvT)−1=A−1−1+vTA−1u(A−1u)(vTA−1)
将Sherman-Morrison Formula公式应用到(5)中,可以得到

迭代过程
BFGS的性质
- 也是一个拟牛顿法
- 也是共轭方向法,寻找到的方向相互共轭
优缺点
- 优点:
- 无需计算精确的黑塞矩阵
- 逆牛顿法
- 符合共轭方向法
- B保持正定
- 步长计算精度不高时仍然稳健
- 无需计算精确的黑塞矩阵
代码示例
代码总览
using LinearAlgebra
using Gadfly
## 划界法
function inexact_alpha(f,g,xk,fk,gk,d;
α0 =1,ϵ=0.1,τ =0.5,
η = 0.5,ζ=2.0)
α = α0
Φ0 = d' * gk
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
# Armijo 不太大条件
while fn > fk + ϵ*α*Φ0
α = τ * α
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
end
# Wolfe 不太小条件
while d' *gn < η * Φ0
α = ζ*α
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
end
return α,δ,xn,fn,gn
end
##割线法搜索步长
function aecant_alpha(f,g,xk,fk,gk,d;α0=1,accuracy=0.001,maxIter = 128)
# _l是当前点,k-1
# _u是下一个点,k
αl = α0
αu = α0*1.1
xl = xk .+ αl .* d
xu = xk .+ αu .* d
gl = g(xl...)
gu = g(xu...)
Φl = d' * gl
Φu = d' * gu
for i in 1:maxIter
Δ = Φu - Φl
# 防止出现分母为0的数学错误
if Δ == 0.0
println("error:出现分母为0的数学错误")
return αu,αu.*d,xu,f(xu...),gu
else
Δ = Φu * (αu - αl)/ Δ
end
if abs(Δ) <= accuracy
return αu,αu.*d,xu,f(xu...),gu
end
αl = αu
xl = xu
gl = gu
Φl = Φu
αu = αu - Δ
xu = xk .+ αu .* d
gu = g(xu...)
Φu = d' * gu
end
return αu,αu.*d,xu,f(xu...),gu
end
## B矩阵迭代函数
function SR1(B,δ,z,δg)
B = B + (δ - z)*(δ - z)' ./ (δg' * δ - δg' * (B * δg))
return B
end
function DFR(B,δ,z,δg)
B = B + (δ * δ') ./ (δg' * δ) - (B*δg)*(B*δg)' ./ (δg' * (B * δg ))
return B
end
function BFGS(B,δ,z,δg)
## 算法会出现 δ * δg接近无限大的情况,算出来的de接近无线小
## 迭代结果就会变成NaN,所以加一个判断
# a = δg' * δ
# # println(a)
# if a > 10e200
# println("-----------WARN:B迭代中出现分母接近无限大情况,已经强制停止迭代---------")
# return "error"
# end
de = 1/(δg' * δ)
# println(de)
z2 = z * δ'
B = B .+ (1 + δg' * z * de) .* δ*δ' .* de .- (z2 + z2') .* de
return B
end
function QuasiNewton(f,
g,
x0;
B0 = I,
fα = aecant_alpha,
fB = SR1,
α0 = 4.0,
ϵ = 0.001,
ϵx = ϵ,
ϵf = ϵ,
ϵg = ϵ,
convergence_rule = x -> x[3],
convergence_abs = true,
iterations = 128,
debug = false,
plotStep = true)
# 检查输入是否符合要求
try
f(x0...)
g(x0...)
catch
println("error:请输入正确的x0")
end
## 初始步
xk = x0
fk = f(xk...)
gk = g(xk...)
## 实例化初始B矩阵
n = length(xk)
B = zeros(n,n) + B0
pts = []
push!(pts,xk)
for i in 1:iterations
d = -B * gk
α,δ,xn,fn,gn = fα(f,g,xk,fk,gk,d)
if plotStep
push!(pts,xn)
end
if debug
println(i,"\tx:",xn,"\tf:",fn,"\ng:",gn,"\tα:",α,"\tδ:",δ,"\tnorm(δ):",norm(δ))
end
## 判断结束条件
conditions = [norm(δ),abs(fn-fk),norm(gn)]
denominator = [max(1,norm(xk), max(1,fk), 1)]
if !convergence_abs
conditions = conditions ./ denominator
end
if convergence_rule(conditions .< [ϵx,ϵf,ϵg])
println("---------------达到迭代结束条件,迭代结束-------")
println("number of steps:",i)
println("norm of the last step size:",norm(δ))
println("norm of the last gradient:",norm(gn))
println("最后一步的f差值:",abs(fn-fk))
return xn, fn ,gn,pts
end
##updata
xn = xk + α .* d
δg = gn - gk
z = B * δg
B = fB(B,δ,z,δg)
if B == "error"
println("number of steps:",i)
println("norm of the last step size:",norm(δ))
println("norm of the last gradient:",norm(gn))
println("最后一步的f差值:",abs(fn-fk))
return xn, fn ,gn,pts
end
# println(i,"\t",δg' * δ)
xk = xn
fk = fn
gk = gn
end
println("---------------达到最大迭代步数,迭代结束-------")
return xn, fn ,gn,pts
end
## 测试用例
# 普通2次函数
f = (x1, x2) -> 2.5*x1^2 + 0.5*x2^2 +2*x1*x2-3*x1-x2
g = (x1,x2) -> [5x1 + 2x2-3,x2+2x1-1]
x0 =[100]
## 画图的范围,记得用小数
low = -100.0
up = 100.0
## Rosenbrock函数
# f = (x1,x2) -> (1-x1)^2 + 100*(x2-x1^2)^2
# g = (x1,x2) -> [-2*(1-x1) - 400*x1*(x2-x1^2), 200*(x2-x1^2)]
# x0 =[0,0]
#
# ## 画图的范围,记得用小数
# low = -1.0
# up = 2.0
## Powell
# f = (x1,x2,x3,x4) -> (x1 + 10*x2)^2 + 5(x3-x4)^2+(x2-2*x3)^4 +10*(x1-x4)^4
# g = (x1,x2,x3,x4) -> [2(x1+10x2)+40(x1-x4)^3,
# 20(x1+10x2) + 4(x2-2x3)^3,
# 10(x3-x4) - 8(x2-2x3)^3,
# -10(x3-x4)-40(x1-x4)^3]
# x0 = [3,-1,0,1]
xn, fn ,gn,pts = QuasiNewton(f,g,
x0,
debug = false,
fB = BFGS,
fα = inexact_alpha)
# println(pts)
# 画图
n = length(pts)
rosen = layer(f,low,up,low,up,Geom.contour())
steps = layer(
## convert()函数将数据转化成了浮点型,这样子才不会报错
## 最后一点不作为起点
x = convert(Vector{Float64},[pts[i][1] for i in 1:n-1]),
y = convert(Vector{Float64},[pts[i][2] for i in 1:n-1]),
## 第一点不作为终点
xend = convert(Vector{Float64},[pts[i][1] for i in 2:n]),
yend = convert(Vector{Float64},[pts[i][2] for i in 2:n]),
Geom.point,Geom.vector(filled = true))
plot(rosen,steps,Scale.x_continuous(minvalue = low,maxvalue = up),
Scale.y_continuous(maxvalue=up,minvalue=low))
写了这么多次代码可以发现,最优化算法的代码几乎都是一样的,不同的只是搜索方向的方法不同。最优化算法存在一定的套路,固定的流程永远是:确定步长-确定搜索方向-迭代到下一点-判断是否达到结束条件-下一次循环。
确定步长算法
这里确定步长的算法依旧是划界法或者非精确搜索算法
function inexact_alpha(f,g,xk,fk,gk,d;
α0 =1,ϵ=0.1,τ =0.5,
η = 0.5,ζ=2.0)
α = α0
Φ0 = d' * gk
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
# Armijo 不太大条件
while fn > fk + ϵ*α*Φ0
α = τ * α
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
end
# Wolfe 不太小条件
while d' *gn < η * Φ0
α = ζ*α
δ = α .* d
xn = xk .+ δ
fn = f(xn...)
gn = g(xn...)
end
return α,δ,xn,fn,gn
end
##划界法搜索步长
function aecant_alpha(f,g,xk,fk,gk,d;α0=1,accuracy=0.001,maxIter = 128)
# _l是当前点,k-1
# _u是下一个点,k
αl = α0
αu = α0*1.1
xl = xk .+ αl .* d
xu = xk .+ αu .* d
gl = g(xl...)
gu = g(xu...)
Φl = d' * gl
Φu = d' * gu
for i in 1:maxIter
Δ = Φu - Φl
# 防止出现分母为0的数学错误
if Δ == 0.0
println("error:出现分母为0的数学错误")
return αu,αu.*d,xu,f(xu...),gu
else
Δ = Φu * (αu - αl)/ Δ
end
if abs(Δ) <= accuracy
return αu,αu.*d,xu,f(xu...),gu
end
αl = αu
xl = xu
gl = gu
Φl = Φu
αu = αu - Δ
xu = xk .+ αu .* d
gu = g(xu...)
Φu = d' * gu
end
return αu,αu.*d,xu,f(xu...),gu
end
迭代B算法(三种拟牛顿法)
这里是定义分别实现SR1,DFP,BFGS算法的函数
## B矩阵迭代函数
function SR1(B,δ,z,δg)
B = B + (δ - z)*(δ - z)' ./ (δg' * δ - δg' * (B * δg))
return B
end
function DFR(B,δ,z,δg)
B = B + (δ * δ') ./ (δg' * δ) - (B*δg)*(B*δg)' ./ (δg' * (B * δg ))
return B
end
function BFGS(B,δ,z,δg)
## 算法会出现 δ * δg接近无限大的情况,算出来的de接近无线小
## 迭代结果就会变成NaN,所以加一个判断
# a = δg' * δ
# # println(a)
# if a > 10e200
# println("-----------WARN:B迭代中出现分母接近无限大情况,已经强制停止迭代---------")
# return "error"
# end
de = 1/(δg' * δ)
# println(de)
z2 = z * δ'
B = B .+ (1 + δg' * z * de) .* δ*δ' .* de .- (z2 + z2') .* de
return B
end
其中BFGS中的注释出现无限的情况我后来发现是我的迭代公式写错了导致的,但是觉得这个处理错误的方法还可以,值得暂时保留着,防止下次还碰上这种情况。
顺便一提,这个BFGS的公式真的特别长,特别容易抄错,如果程序报错在这一行,也不要盯着自己写的代码看了,大概率看不出错误在哪,直接重新抄一遍公式得了
检查输入
# 检查输入是否符合要求
try
f(x0...)
g(x0...)
catch
println("error:请输入正确的x0")
end
使用的是try…catch函数,如果try里面的程序块报错,就会实行catch中的程序块,这里如果输入的x0和f或者g的长度不符合,就会输出:error:请输入正确的x0。
虽然后面的程序依旧会因为x0的格式不对,但是起码能第一时间提醒自己是x0的输入出了错误。
测试用例
## 测试用例
# 普通2次函数
f = (x1, x2) -> 2.5*x1^2 + 0.5*x2^2 +2*x1*x2-3*x1-x2
g = (x1,x2) -> [5x1 + 2x2-3,x2+2x1-1]
x0 =[100,100]
## 画图的范围,记得用小数
low = -100.0
up = 100.0
## Rosenbrock函数
# f = (x1,x2) -> (1-x1)^2 + 100*(x2-x1^2)^2
# g = (x1,x2) -> [-2*(1-x1) - 400*x1*(x2-x1^2), 200*(x2-x1^2)]
# x0 =[0,0]
#
# ## 画图的范围,记得用小数
# low = -1.0
# up = 2.0
## Powell,这个函数不能画图,记得把画图的代码注释掉
# f = (x1,x2,x3,x4) -> (x1 + 10*x2)^2 + 5(x3-x4)^2+(x2-2*x3)^4 +10*(x1-x4)^4
# g = (x1,x2,x3,x4) -> [2(x1+10x2)+40(x1-x4)^3,
# 20(x1+10x2) + 4(x2-2x3)^3,
# 10(x3-x4) - 8(x2-2x3)^3,
# -10(x3-x4)-40(x1-x4)^3]
# x0 = [3,-1,0,1]
xn, fn ,gn,pts = QuasiNewton(f,g,
x0,
debug = false,
fB = BFGS,
fα = inexact_alpha)
# println(pts)
# 画图
n = length(pts)
rosen = layer(f,low,up,low,up,Geom.contour())
steps = layer(
## convert()函数将数据转化成了浮点型,这样子才不会报错
## 最后一点不作为起点
x = convert(Vector{Float64},[pts[i][1] for i in 1:n-1]),
y = convert(Vector{Float64},[pts[i][2] for i in 1:n-1]),
## 第一点不作为终点
xend = convert(Vector{Float64},[pts[i][1] for i in 2:n]),
yend = convert(Vector{Float64},[pts[i][2] for i in 2:n]),
Geom.point,Geom.vector(filled = true))
plot(rosen,steps,Scale.x_continuous(minvalue = low,maxvalue = up),
Scale.y_continuous(maxvalue=up,minvalue=low))
其他地方和共轭梯度法的算法其实没有太大的区别,如果对其他代码有什么疑问,可以看我写的共轭梯度法
声明
这个博客是博主根据博主的老师上传的视频整理得到的,仅供参考和学习,也欢迎大家和我交流讨论。
参考
SR1法
DFP法
BFGS法