SPI驱动和协议(一)-SPI协议简介
参考:
https://www.cnblogs.com/aaronLinux/p/6219146.html
https://www.cnblogs.com/reality-soul/p/6170879.html
https://blog.csdn.net/yaolanshu_june/article/details/52356138
1. 标准SPI,Dual SPI和Qual SPI
1.1 标准SPI标准SPI通常就称SPI,它是一种串行外设接口规范,有4根引脚信号:clk , cs, mosi, miso
1.2 Dual SPI
它只是针对SPI Flash而言,不是针对所有SPI外设。对于SPI Flash,全双工并不常用,因此扩展了mosi和miso的用法,让它们工作在半双工,用以加倍数据传输。
也就是对于Dual SPI Flash,可以发送一个命令字节进入dual mode,这样mosi变成SIO0(serial io 0),mosi变成SIO1(serial io 1),这样一个时钟周期内就能传输2个bit数据,加倍了数据传输。
1.3 Qual SPI
与Dual SPI类似,也是针对SPI Flash,Qual SPI Flash在Dual SPI基础上增加了两根I/O线(SIO2,SIO3),目的是一个时钟内传输4个bit所以对于SPI Flash,有标准spi flash,dual spi , qual spi 三种类型,分别对应3-wire(因为mosi和miso单工), 4-wire, 6-wire,在相同clock下,线数越多,传输速率越高。
btw:spi flash一般为NOR Flash
1.SPI协议简介
1.1.SPI协议概括
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的串行通信总线,,在主器件的移位脉冲下,数据按位传输,高位在前,低位在后. 并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200.
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。
- SDO – 主设备数据输出,从设备数据输入
- SDI – 主设备数据输入,从设备数据输出
- SCLK – 时钟信号,由主设备产生
- CS – 从设备使能信号,由主设备控制
CS: 其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效,这就允许在同一总线上连接多个SPI设备成为可能。
SDI/SDO/SCLK: 通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。
要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI的设备中,至少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据,也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。
1.SCLK只能被主端控制,从端接收。
2.可以同时发出和接收串行数据;
3.可以当作主机或从机工作;
4.提供频率可编程时钟;
5.发送结束 中断标志;
6.写冲突保护;
7.总线竞争保护等最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
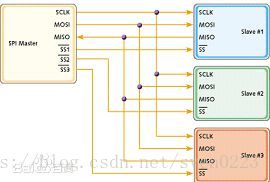
SPICLK、MOSI、MISO及 /SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。在一个SPI通信系统中,必须有主机。SPI总线可以配置成单主单从,单主多从,互为主从。
SPI四种工作模式:
SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
• 如果 CPOL=0,串行同步时钟的空闲状态为低电平;
• 如果CPOL=1,串行同步时钟的空闲状态为高电平。
• 时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
• 如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;
• 如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
• SPI主模块和与之通信的外设备时钟相位和极性应该一致。