DRM 驱动程序开发(VKMS)
前言
距离上一篇《DRM 驱动程序开发(开篇)》已经过去快整整1年了,如果再不更新的话,这个 DRM 系列教程很可能就夭折了。之所以现在才写本文,主要有两个原因:1. 本人工作内容发生变动。2. 始终没找到合适的硬件平台来做示例讲解。其中第2点是我一直拖延的主要原因,因为作为示例教程,我希望它是硬件无关的,这样即使大家没有硬件环境也可以学习 DRM 驱动开发。可惜,最终找来找去也就 QEMU 比较可行,但需要自己开发模拟硬件,还在摸索中。
与其等到 QEMU 硬件开发完成(猴年马月),不如先找个最简单的 DRM 驱动程序讲讲,也不至于让那些关注本教程的人苦苦等待。好了,那就让我们直接上 VKMS 吧!
VKMS 简介
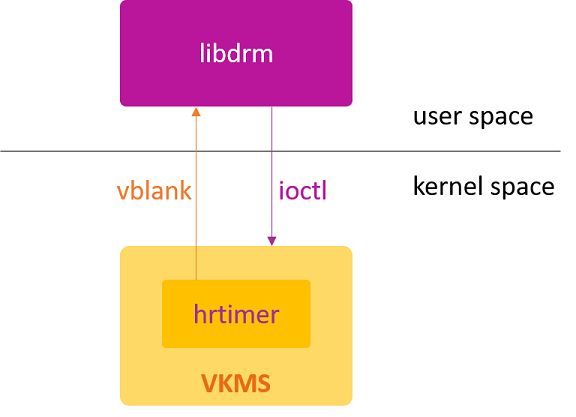
VKMS 是 “Virtual Kernel Mode Setting” 的缩写,它于2018年7月5日被合入到 linux-4.19 主线版本中,并存放在 drivers/gpu/drm/vkms 目录下。之所以称它为 Virtual KMS,是因为该驱动不需要真实的硬件,它完全是一个软件虚拟的“显示”设备,甚至连显示都算不上,因为当它运行时,你看不到任何显示内容。它唯一能提供的,就是一个由高精度 timer 模拟的 VSYNC 中断信号!该驱动存在的目的,主要是为了 DRM 框架自测试,以及方便那些无头显示器设备的调试应用。虽然我们看不到 VKMS 的显示效果,但是在驱动流程上,它实现了 modesetting 该有的基本操作。因其逻辑简单,代码量少,拿来做学习案例讲解再好不过。
随着内核版本的不断升级,添加到 VKMS 的功能也越来越多,截止到目前最新的内核版本 kernel 5.7-rc2,该 VKMS 驱动已经集成了如下功能:
- Atomic Modeset
- VBlank
- Dumb Buffer
- Cursor & Primary Plane
- Framebuffer CRC 校验
- Plane Composition
- GEM Prime Import
linux-4.19-rc1 是 VKMS 的第一个版本,也最为简单,因此本文就以该版本为例,并将其反向移植到 linux-4.14.143 上,同时对代码做了进一步精简,尽量避免细枝末节。下面就跟着我一起来学习,如何从0到1实现一个 VKMS 驱动吧!
示例 1
这是一个最简单的 DRM 驱动代码:
#include static struct drm_device drm;
static struct drm_driver vkms_driver = {
.name = “vkms”,
.desc = “Virtual Kernel Mode Setting”,
.date = “20180514”,
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
你没看错,就这么几行代码!是不是颠覆了你对 DRM Driver 的认识?
我知道你在怀疑什么,让我们来看看这点代码能给我们带来些什么。我们将该驱动以 build-in 方式编译进内核,然后启动内核,如果你在 kernel log 中仔细查找,会发现有如下 drm log:
[drm] Initialized vkms 1.0.0 20180514 for virtual device on minor 0
- 1
这些信息正是从上面的 name、date、major、minor 字段中获取的。除此之外,DRM 框架还为我们做了下面这些事情:
- 创建设备节点:
/dev/dri/card0 - 创建 sysfs 节点:
/sys/class/drm/card0 - 创建 debugfs 节点:
/sys/kernel/debug/dri/0
当然,简单是以牺牲功能为代价的。该驱动目前什么事情也做不了,你唯一能做的就是查看该驱动的名字:
$ cat /sys/kernel/debug/dri/0/name
vkms unique=vkms
- 1
- 2
你甚至都无法对 /dev/dri/card0 进行 open 操作,因为该 vkms driver 都还没有实现 fops 接口!
即使不添加任何 DRM 驱动,仅仅只是让 DRM Core 代码参与编译,你会发现 DRM 框架已经为我们创建好了如下调试节点:
- /sys/class/drm/
- /sys/kernel/debug/dri/
- /sys/module/drm/parameters/
- /sys/module/drm_kms_helper/parameters/
示例 2
接下来我们给 vkms 添加上 fops 操作接口。
#include static struct drm_device drm;
static const struct file_operations vkms_fops = {
.owner = THIS_MODULE,
.open = drm_open,
.release = drm_release,
.unlocked_ioctl = drm_ioctl,
.poll = drm_poll,
.read = drm_read,
};
static struct drm_driver vkms_driver = {
.fops = &vkms_fops,
.name = "vkms",
.desc = "Virtual Kernel Mode Setting",
.date = "20180514",
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
有了 fops,我们就可以对 card0 进行 open / read 操作了。更重要的是,我们现在可以进行一些简单的 ioctl 操作了!让我们看看现在可以执行哪些 IOCTL:
| IOCTL | Userspace API | 描述 |
|---|---|---|
| DRM_IOCTL_VERSION | drmGetVersion() | 获取 Driver 版本信息,即上面的 name、desc、date、major、minor 字段 |
| DRM_IOCTL_GET_UNIQUE | drmGetBusid() | 获取 Bus ID |
| DRM_IOCTL_GET_MAGIC | drmGetMagic() | 获取 Magic Number,用于 GEM ioctl 权限检查 |
| DRM_IOCTL_AUTH_MAGIC | drmAuthMagic() | 通过当前 Magic Number 获取 GEM ioctl 的权限认证 |
| DRM_IOCTL_GET_CLIENT | drmGetClient() | 获取当前 DRM 设备上的所有 client 进程 |
| DRM_IOCTL_GET_CAP | drmGetCap() | 获取当前 DRM 设备所支持的能力 |
| DRM_IOCTL_SET_CLIENT_CAP | drmSetClientCap() | 告诉 DRM 驱动当前用户进程所支持的能力 |
| DRM_IOCTL_SET_MASTER | drmSetMaster() | 获取 DRM-Master 访问权限 |
| DRM_IOCTL_DROP_MASTER | drmDropMaster() | 放弃 DRM-Master 访问权限 |
到目前为止,凡是和 modesetting 相关的操作,我们还是操作不了。
示例 3
添加 drm mode objects:
#include static struct drm_device drm;
static struct drm_plane primary;
static struct drm_crtc crtc;
static struct drm_encoder encoder;
static struct drm_connector connector;
static const struct drm_plane_funcs vkms_plane_funcs;
static const struct drm_crtc_funcs vkms_crtc_funcs;
static const struct drm_encoder_funcs vkms_encoder_funcs;
static const struct drm_connector_funcs vkms_connector_funcs;
static const u32 vkms_formats[] = {
DRM_FORMAT_XRGB8888,
};
static void vkms_modeset_init(void)
{
drm_mode_config_init(&drm);
drm_universal_plane_init(&drm, &primary, 0, &vkms_plane_funcs,
vkms_formats, ARRAY_SIZE(vkms_formats),
NULL, DRM_PLANE_TYPE_PRIMARY, NULL);
drm_crtc_init_with_planes(&drm, &crtc, &primary, NULL, &vkms_crtc_funcs, NULL);
drm_encoder_init(&drm, &encoder, &vkms_encoder_funcs, DRM_MODE_ENCODER_VIRTUAL, NULL);
drm_connector_init(&drm, &connector, &vkms_connector_funcs, DRM_MODE_CONNECTOR_VIRTUAL);
}
static const struct file_operations vkms_fops = {
.owner = THIS_MODULE,
.open = drm_open,
.release = drm_release,
.unlocked_ioctl = drm_ioctl,
.poll = drm_poll,
.read = drm_read,
};
static struct drm_driver vkms_driver = {
.driver_features = DRIVER_MODESET,
.fops = &vkms_fops,
.name = "vkms",
.desc = "Virtual Kernel Mode Setting",
.date = "20180514",
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
vkms_modeset_init();
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
重点:
- 给 driver_features 添加上
DRIVER_MODESET标志位,告诉 DRM Core 当前驱动支持 modesetting 操作; drm_mode_config_init()初始化一些全局的数据结构。注意,那些 Standard Properties 就是在这里创建的。drm_xxx_init()则分别用于创建 plane、crtc、encoder、connector 这4个 drm_mode_object。
由于上面4个 objects 在创建时,它们的 callback funcs 没有赋初值,所以真正的 modeset 操作目前还无法正常执行,不过我们至少可以使用下面这些只读的 modeset IOCTL 了:
| IOCTL | Userspace API | 描述 |
|---|---|---|
| DRM_IOCTL_MODE_GETRESOURCES | drmModeGetResources() | 获取 fb、crtc、connector、encoder 资源列表, |
| DRM_IOCTL_MODE_GETPLANERESOURCES | drmModeGetPlaneResources() | 获取 Plane 资源列表 |
| DRM_IOCTL_MODE_GETCRTC | drmModeGetCrtc() | 获取 CRTC 当前的状态信息 |
| DRM_IOCTL_MODE_GETPLANE | drmModeGetPlane() | 获取 Plane 当前的状态信息 |
| DRM_IOCTL_MODE_GETENCODER | drmModeGetEncoder() | 获取 Encoder 当前的状态信息 |
| DRM_IOCTL_MODE_GETCONNECTOR | drmModeGetConnector() | 获取 Connector 的当前状态信息 |
| DRM_IOCTL_MODE_GETPROPBLOB | drmModeGetPropertyBlob() | 获取1个 Property Blob 对象 |
| DRM_IOCTL_MODE_CREATEPROPBLOB | drmModeCreatePropertyBlob() | 创建1个 Property Blob 对象 |
| DRM_IOCTL_MODE_DESTROYPROPBLOB | drmModeDestroyPropertyBlob() | 销毁1个 Property Blob 对象 |
示例 4
添加 FB 和 GEM 支持:
#include static struct drm_device drm;
static struct drm_plane primary;
static struct drm_crtc crtc;
static struct drm_encoder encoder;
static struct drm_connector connector;
static const struct drm_plane_funcs vkms_plane_funcs;
static const struct drm_crtc_funcs vkms_crtc_funcs;
static const struct drm_encoder_funcs vkms_encoder_funcs;
static const struct drm_connector_funcs vkms_connector_funcs;
/* add here */
static const struct drm_mode_config_funcs vkms_mode_funcs = {
.fb_create = drm_fb_cma_create,
};
static const u32 vkms_formats[] = {
DRM_FORMAT_XRGB8888,
};
static void vkms_modeset_init(void)
{
drm_mode_config_init(&drm);
drm.mode_config.max_width = 8192;
drm.mode_config.max_height = 8192;
/* add here */
drm.mode_config.funcs = &vkms_mode_funcs;
drm_universal_plane_init(&drm, &primary, 0, &vkms_plane_funcs,
vkms_formats, ARRAY_SIZE(vkms_formats),
NULL, DRM_PLANE_TYPE_PRIMARY, NULL);
drm_crtc_init_with_planes(&drm, &crtc, &primary, NULL, &vkms_crtc_funcs, NULL);
drm_encoder_init(&drm, &encoder, &vkms_encoder_funcs, DRM_MODE_ENCODER_VIRTUAL, NULL);
drm_connector_init(&drm, &connector, &vkms_connector_funcs, DRM_MODE_CONNECTOR_VIRTUAL);
}
static const struct file_operations vkms_fops = {
.owner = THIS_MODULE,
.open = drm_open,
.release = drm_release,
.unlocked_ioctl = drm_ioctl,
.poll = drm_poll,
.read = drm_read,
/* add here */
.mmap = drm_gem_cma_mmap,
};
static struct drm_driver vkms_driver = {
.driver_features = DRIVER_MODESET | DRIVER_GEM,
.fops = &vkms_fops,
/* add here */
.dumb_create = drm_gem_cma_dumb_create,
.gem_vm_ops = &drm_gem_cma_vm_ops,
.gem_free_object_unlocked = drm_gem_cma_free_object,
.name = "vkms",
.desc = "Virtual Kernel Mode Setting",
.date = "20180514",
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
vkms_modeset_init();
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
重点:
- 给 driver_features 添加上
DRIVER_GEM标志位,告诉 DRM Core 该驱动支持 GEM 操作; dumb_create回调接口用于创建 gem object,并分配物理 buffer。这里直接使用 CMA helper 函数来实现;fb_create回调接口用于创建 framebuffer object,并绑定 gem objects。这里直接使用 CMA helper 函数实现。- fops 中的
mmap接口,用于将 dumb buffer 映射到 userspace,它依赖 drm driver 中的gem_vm_ops实现。这里也直接使用 CMA helper 函数来实现。
现在,我们可以使用如下 IOCTL 来进行一些标准的 GEM 和 FB 操作了!
| IOCTL | Userspace API | 描述 |
|---|---|---|
| DRM_IOCTL_MODE_CREATE_DUMB | dumb_bo_create() | 创建一个 dumb buffer 对象 |
| DRM_IOCTL_MODE_MAP_DUMB | dumb_bo_map() | 将 dumb buffer 映射到用户空间 |
| DRM_IOCTL_MODE_DESTROY_DUMB | dumb_bo_destroy() | 销毁一个 dumb buffer 对象 |
| DRM_IOCTL_MODE_ADDFB | drmModeAddFB() | 向 DRM 驱动注册一个 framebuffer object |
| DRM_IOCTL_MODE_ADDFB2 | drmModeAddFB2() | drmModeAddFB() 的升级版 |
| DRM_IOCTL_MODE_GETFB | drmModeGetFB() | 获取指定 ID 的 framebuffer object |
| DRM_IOCTL_MODE_RMFB | drmModeRmFB() | 销毁指定的 framebuffer object |
示例 5
实现 callback funcs,添加 Legacy Modeset 支持(代码量较大):
#include static struct drm_device drm;
static struct drm_plane primary;
static struct drm_crtc crtc;
static struct drm_encoder encoder;
static struct drm_connector connector;
static void vkms_crtc_dpms(struct drm_crtc *crtc, int mode)
{
}
static int vkms_crtc_mode_set(struct drm_crtc crtc,
struct drm_display_mode mode,
struct drm_display_mode adjusted_mode,
int x, int y, struct drm_framebuffer old_fb)
{
return 0;
}
static void vkms_crtc_prepare(struct drm_crtc *crtc)
{
}
static void vkms_crtc_commit(struct drm_crtc *crtc)
{
}
static int vkms_crtc_page_flip(struct drm_crtc crtc,
struct drm_framebuffer fb,
struct drm_pending_vblank_event event,
uint32_t page_flip_flags,
struct drm_modeset_acquire_ctx ctx)
{
unsigned long flags;
crtc->primary->fb = fb;
if (event) {
spin_lock_irqsave(&crtc->dev->event_lock, flags);
drm_crtc_send_vblank_event(crtc, event);
spin_unlock_irqrestore(&crtc->dev->event_lock, flags);
}
return 0;
}
static const struct drm_crtc_helper_funcs vkms_crtc_helper_funcs = {
.dpms = vkms_crtc_dpms,
.mode_set = vkms_crtc_mode_set,
.prepare = vkms_crtc_prepare,
.commit = vkms_crtc_commit,
};
static const struct drm_crtc_funcs vkms_crtc_funcs = {
.set_config = drm_crtc_helper_set_config,
.page_flip = vkms_crtc_page_flip,
.destroy = drm_crtc_cleanup,
};
static const struct drm_plane_funcs vkms_plane_funcs = {
.update_plane = drm_primary_helper_update,
.disable_plane = drm_primary_helper_disable,
.destroy = drm_plane_cleanup,
};
static int vkms_connector_get_modes(struct drm_connector *connector)
{
int count;
count = drm_add_modes_noedid(connector, 8192, 8192);
drm_set_preferred_mode(connector, 1024, 768);
return count;
}
static struct drm_encoder vkms_connector_best_encoder(struct drm_connector connector)
{
return &encoder;
}
static const struct drm_connector_helper_funcs vkms_conn_helper_funcs = {
.get_modes = vkms_connector_get_modes,
.best_encoder = vkms_connector_best_encoder,
};
static const struct drm_connector_funcs vkms_connector_funcs = {
.dpms = drm_helper_connector_dpms,
.fill_modes = drm_helper_probe_single_connector_modes,
.destroy = drm_connector_cleanup,
};
static const struct drm_encoder_funcs vkms_encoder_funcs = {
.destroy = drm_encoder_cleanup,
};
static const struct drm_mode_config_funcs vkms_mode_funcs = {
.fb_create = drm_fb_cma_create,
};
static const u32 vkms_formats[] = {
DRM_FORMAT_XRGB8888,
};
static void vkms_modeset_init(void)
{
drm_mode_config_init(&drm);
drm.mode_config.max_width = 8192;
drm.mode_config.max_height = 8192;
drm.mode_config.funcs = &vkms_mode_funcs;
drm_universal_plane_init(&drm, &primary, 0, &vkms_plane_funcs,
vkms_formats, ARRAY_SIZE(vkms_formats),
NULL, DRM_PLANE_TYPE_PRIMARY, NULL);
drm_crtc_init_with_planes(&drm, &crtc, &primary, NULL, &vkms_crtc_funcs, NULL);
drm_crtc_helper_add(&crtc, &vkms_crtc_helper_funcs);
drm_encoder_init(&drm, &encoder, &vkms_encoder_funcs, DRM_MODE_ENCODER_VIRTUAL, NULL);
drm_connector_init(&drm, &connector, &vkms_connector_funcs, DRM_MODE_CONNECTOR_VIRTUAL);
drm_connector_helper_add(&connector, &vkms_conn_helper_funcs);
drm_mode_connector_attach_encoder(&connector, &encoder);
}
static const struct file_operations vkms_fops = {
.owner = THIS_MODULE,
.open = drm_open,
.release = drm_release,
.unlocked_ioctl = drm_ioctl,
.poll = drm_poll,
.read = drm_read,
.mmap = drm_gem_cma_mmap,
};
static struct drm_driver vkms_driver = {
.driver_features = DRIVER_MODESET | DRIVER_GEM,
.fops = &vkms_fops,
.dumb_create = drm_gem_cma_dumb_create,
.gem_vm_ops = &drm_gem_cma_vm_ops,
.gem_free_object_unlocked = drm_gem_cma_free_object,
.name = "vkms",
.desc = "Virtual Kernel Mode Setting",
.date = "20180514",
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
vkms_modeset_init();
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
重点:
- xxx_funcs 必须有,xxx_helper_funcs 可以没有。
- drm_xxx_init() 必须有,drm_xxx_helper_add() 可以没有。
- 只有当 xxx_funcs 采用 DRM 标准的 helper 函数实现时,才有可能 需要定义 xxx_helper_funcs 接口。
drmModeSetCrtc()===> crtc_funcs.set_config()
drmModePageFlip()===> crtc_funcs.page_flip()
drmModeSetPlane()===> plane_funcs.update_plane()
drmModeGetConnector()===> connector_funcs.fill_modes()- xxx_funcs.
destroy()接口必须实现。
提示:本示例中的 funcs 和 helper funcs 接口无法再精简,否则运行时将出现 kernel crash!
helper 函数的作用:
drm_xxx_funcs 是 drm ioctl 操作的最终入口,但是对于大多数 SoC 厂商来说,它们的 drm_xxx_funcs 操作流程基本相同(你抄我,我抄你),只是在寄存器配置上存在差异,因此开发者们将那些 common 的操作流程做成了 helper 函数,而将那些厂商差异化的代码放到了 drm_xxx_helper_funcs 中去,由 SoC 厂商自己实现。
有了各种 funcs 和 helper funcs,我们现在终于可以执行真正的 modeset 操作了,不过目前只支持 legacy modeset,赶紧使用《最简单的DRM应用程序 (single-buffer)》 来验证一下吧!
当前支持的 modeset IOCTL:
| IOCTL | Userspace API | 描述 |
|---|---|---|
| DRM_IOCTL_MODE_SETCRTC | drmModeSetCrtc() | 初始化整个硬件 pipeline 并显示图像 |
| DRM_IOCTL_MODE_SETPLANE | drmModeSetPlane() | 设置单个 Plane 的显示参数 |
| DRM_IOCTL_MODE_PAGE_FLIP | drmModePageFlip() | 基于 VSYNC 同步机制的显示刷新 |
| DRM_IOCTL_MODE_GETPROPERTY | drmModeGetProperty() | 根据 Property ID 获取对应 Property 的值 |
| DRM_IOCTL_MODE_SETPROPERTY | drmModeConnectorSetProperty() | 根据 Property ID 设置对应 Property 的值,目前仅用于 Connector 对象 |
示例 6
将上面的 Legacy code 转换为 Atomic 版本:
#include static struct drm_device drm;
static struct drm_plane primary;
static struct drm_crtc crtc;
static struct drm_encoder encoder;
static struct drm_connector connector;
static struct hrtimer vblank_hrtimer;
static enum hrtimer_restart vkms_vblank_simulate(struct hrtimer *timer)
{
drm_crtc_handle_vblank(&crtc);
hrtimer_forward_now(&vblank_hrtimer, 16666667);
return HRTIMER_RESTART;
}
static void vkms_crtc_atomic_enable(struct drm_crtc crtc,
struct drm_crtc_state old_state)
{
hrtimer_init(&vblank_hrtimer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
vblank_hrtimer.function = &vkms_vblank_simulate;
hrtimer_start(&vblank_hrtimer, 16666667, HRTIMER_MODE_REL);
}
static void vkms_crtc_atomic_disable(struct drm_crtc crtc,
struct drm_crtc_state old_state)
{
hrtimer_cancel(&vblank_hrtimer);
}
static void vkms_crtc_atomic_flush(struct drm_crtc crtc,
struct drm_crtc_state old_crtc_state)
{
unsigned long flags;
if (crtc->state->event) {
spin_lock_irqsave(&crtc->dev->event_lock, flags);
drm_crtc_send_vblank_event(crtc, crtc->state->event);
spin_unlock_irqrestore(&crtc->dev->event_lock, flags);
crtc->state->event = NULL;
}
}
static const struct drm_crtc_helper_funcs vkms_crtc_helper_funcs = {
.atomic_enable = vkms_crtc_atomic_enable,
.atomic_disable = vkms_crtc_atomic_disable,
.atomic_flush = vkms_crtc_atomic_flush,
};
static const struct drm_crtc_funcs vkms_crtc_funcs = {
.set_config = drm_atomic_helper_set_config,
.page_flip = drm_atomic_helper_page_flip,
.destroy = drm_crtc_cleanup,
.reset = drm_atomic_helper_crtc_reset,
.atomic_duplicate_state = drm_atomic_helper_crtc_duplicate_state,
.atomic_destroy_state = drm_atomic_helper_crtc_destroy_state,
};
static void vkms_plane_atomic_update(struct drm_plane plane,
struct drm_plane_state old_state)
{
}
static const struct drm_plane_helper_funcs vkms_plane_helper_funcs = {
.atomic_update = vkms_plane_atomic_update,
};
static const struct drm_plane_funcs vkms_plane_funcs = {
.update_plane = drm_atomic_helper_update_plane,
.disable_plane = drm_atomic_helper_disable_plane,
.destroy = drm_plane_cleanup,
.reset = drm_atomic_helper_plane_reset,
.atomic_duplicate_state = drm_atomic_helper_plane_duplicate_state,
.atomic_destroy_state = drm_atomic_helper_plane_destroy_state,
};
static int vkms_conn_get_modes(struct drm_connector *connector)
{
int count;
count = drm_add_modes_noedid(connector, 8192, 8192);
drm_set_preferred_mode(connector, 1024, 768);
return count;
}
static const struct drm_connector_helper_funcs vkms_conn_helper_funcs = {
.get_modes = vkms_conn_get_modes,
};
static const struct drm_connector_funcs vkms_connector_funcs = {
.fill_modes = drm_helper_probe_single_connector_modes,
.destroy = drm_connector_cleanup,
.reset = drm_atomic_helper_connector_reset,
.atomic_duplicate_state = drm_atomic_helper_connector_duplicate_state,
.atomic_destroy_state = drm_atomic_helper_connector_destroy_state,
};
static const struct drm_encoder_funcs vkms_encoder_funcs = {
.destroy = drm_encoder_cleanup,
};
static const struct drm_mode_config_funcs vkms_mode_funcs = {
.fb_create = drm_fb_cma_create,
.atomic_check = drm_atomic_helper_check,
.atomic_commit = drm_atomic_helper_commit,
};
static const u32 vkms_formats[] = {
DRM_FORMAT_XRGB8888,
};
static void vkms_modeset_init(void)
{
drm_mode_config_init(&drm);
drm.mode_config.max_width = 8192;
drm.mode_config.max_height = 8192;
drm.mode_config.funcs = &vkms_mode_funcs;
drm_universal_plane_init(&drm, &primary, 0, &vkms_plane_funcs,
vkms_formats, ARRAY_SIZE(vkms_formats),
NULL, DRM_PLANE_TYPE_PRIMARY, NULL);
drm_plane_helper_add(&primary, &vkms_plane_helper_funcs);
drm_crtc_init_with_planes(&drm, &crtc, &primary, NULL, &vkms_crtc_funcs, NULL);
drm_crtc_helper_add(&crtc, &vkms_crtc_helper_funcs);
drm_encoder_init(&drm, &encoder, &vkms_encoder_funcs, DRM_MODE_ENCODER_VIRTUAL, NULL);
drm_connector_init(&drm, &connector, &vkms_connector_funcs, DRM_MODE_CONNECTOR_VIRTUAL);
drm_connector_helper_add(&connector, &vkms_conn_helper_funcs);
drm_mode_connector_attach_encoder(&connector, &encoder);
drm_mode_config_reset(&drm);
}
static const struct file_operations vkms_fops = {
.owner = THIS_MODULE,
.open = drm_open,
.release = drm_release,
.unlocked_ioctl = drm_ioctl,
.poll = drm_poll,
.read = drm_read,
.mmap = drm_gem_cma_mmap,
};
static struct drm_driver vkms_driver = {
.driver_features = DRIVER_MODESET | DRIVER_GEM | DRIVER_ATOMIC,
.fops = &vkms_fops,
.dumb_create = drm_gem_cma_dumb_create,
.gem_vm_ops = &drm_gem_cma_vm_ops,
.gem_free_object_unlocked = drm_gem_cma_free_object,
.name = "vkms",
.desc = "Virtual Kernel Mode Setting",
.date = "20180514",
.major = 1,
.minor = 0,
};
static int __init vkms_init(void)
{
drm_dev_init(&drm, &vkms_driver, NULL);
vkms_modeset_init();
drm_vblank_init(&drm, 1);
drm.irq_enabled = true;
drm_dev_register(&drm, 0);
return 0;
}
module_init(vkms_init);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
重点:
- 给 driver_features 添加上
DRIVER_ATOMIC标志位,告诉 DRM Core 该驱动支持 Atomic 操作。 - drm_mode_config_funcs.
atomic_commit()接口是 atomic 操作的主要入口函数,必须实现。这里直接使用drm_atomic_helper_commit()函数实现。 - Atomic 操作依赖 VSYNC 中断(即 VBLANK 事件),因此需要使用 hrtimer 来提供软件中断信号。在驱动初始化时调用
drm_vblank_init(),在 VSYNC 中断处理函数中调用drm_handle_vblank()。 - 在 plane/crtc/encoder/connector objects 初始化完成之后,一定要调用
drm_mode_config_reset()来动态创建各个 pipeline 的软件状态(即 drm_xxx_state)。 - 与 Legacy 相比,Atomic 的 xxx_funcs 必须 实现如下接口:
reset()
atomic_duplicate_state()
atomic_destroy_state(),
它们主要用于维护 drm_xxx_state 数据结构,不能省略! drm_plane_helper_funcs.atomic_update()必须实现!
终于,我们可以使用 drmModeAtomicCommit() 了,赶紧使用前面的《DRM应用程序进阶 (atomic-plane)》 示例程序测试一下吧!
| IOCTL | Userspace API | 描述 |
|---|---|---|
| DRM_IOCTL_MODE_ATOMIC | drmModeAtomicCommit() | 不解释 |
| DRM_IOCTL_MODE_OBJ_GETPROPERTIES | drmModeObjectGetProperties() | 根据 drm mode object 的 ID,获取该 object 所拥有的所有 Property 对象 |
| DRM_IOCTL_MODE_OBJ_SETPROPERTY | drmModeObjectSetProperty() | 根据 drm mode object 的 ID,设置该 object 某个具体的 Property 对象的值 |
到这里,一个 “最简单” 的 Atomic 驱动程序也就完成了,虽然最终看起来并不那么简单。。。
总结
要实现一个 DRM KMS 驱动,通常需要实现如下代码:
fops、drm_driverdumb_create、fb_create、atomic_commitdrm_xxx_funcs、drm_xxx_helper_funcsdrm_xxx_init()、drm_xxx_helper_add()drm_dev_init()、drm_dev_register()
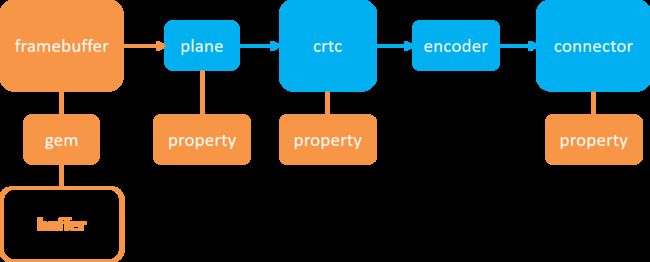
但这都只是表象,核心仍然是上一篇《DRM 驱动程序开发(开篇)》中介绍的7个 objects,一切都围绕着这几个 objects 展开:
- 为了创建 crtc/plane/encoder/connector objects,需要调用
drm_xxx_init()。 - 为了创建 framebuffer object,需要实现
fb_create()callback。 - 为了创建 gem object,需要实现
dumb_create()callback。 - 为了创建 property objects,需要调用
drm_mode_config_init()。 - 为了让这些 objects 动起来,需要实现各种 funcs 和 helper funcs。
- 为了支持 atomic 操作,需要实现
atomic_commit()callback。
结语
DRM Driver 是内核中一个较为复杂的子系统,在内核社区的更新也十分活跃,但因其涉及到的知识点较多,教程写起来难度也比较大,我想这也是为什么国内熟悉 DRM 驱动的人不在少数,却很少有人能输出 系统性 的 DRM 学习文档,毕竟要写好真的很难,而且大牛们真的都很忙。
希望我的文章,能为那些还在 DRM 学习路上的小伙伴们提供帮助,解答他们心中的疑惑。下一篇,我将介绍 DRM GEM 相关的知识,敬请期待!
最后,送上 VKMS 社区简化版(相比本文的示例,更接近于 kernel 4.19 版本):vkms_drv.c
源码下载
我的码云:vkms
参考资料
- kernel doc: drm/vkms Virtual Kernel Modesetting
- drm/vkms: Introduce basic VKMS driver
文章汇总: DRM (Direct Rendering Manager) 学习简介