HashMap面试题-------深入理解HashMap集合(负载因子、哈希冲突、与HashTable的区别)
“有一天清晨,我扔掉了所有的昨天,从此我的脚步便轻盈了。”
文章目录
-
- JDK1.7和JDK1.8中的HashMap有什么区别?
- JDK1.8中,为什么引入了红黑树?
- HashMap如何解决哈希冲突?
- 什么是负载因子?为什么负载因子设置为0.75?
- HashMap为什么线程不安全?
-
- 扩容引发的死循环及数据丢失
- 数据覆盖
- HashMap、HashTable和ConcurrentHashMap三者的区别?
.
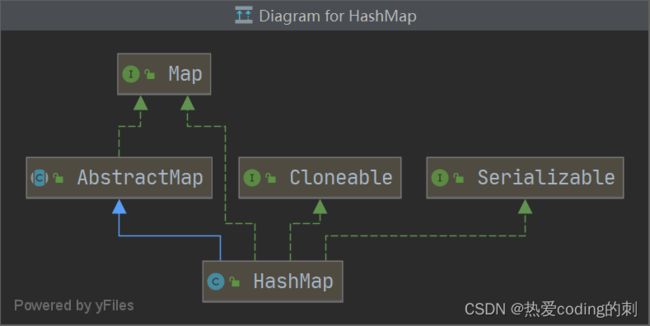
HashMap的类结构图
JDK1.7和JDK1.8中的HashMap有什么区别?
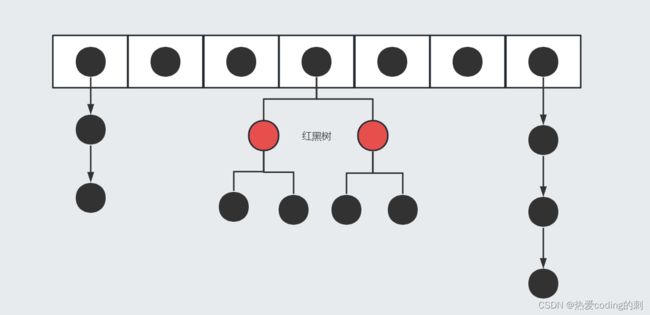
JDK1.7中,hashmap的底层数据结构是数组和链表;JDK1.8中,hashmap的底层数据结构是数组、链表以及红黑树。
JDK1.8中,为什么引入了红黑树?
即使哈希函数取得再好,也很难达到元素百分百均匀分布。在JDK1.7中,哈希冲突的解决办法是链表,即在索引处引入一个单链表,这样的话,如果发生哈希冲突的元素比较多,那么链表就会很长,并且遍历的时间复杂度是O(n),hashmap就失去了优势;但是引入红黑树之后,红黑树遍历的时间复杂度是O(logn),这样效率比较高
HashMap如何解决哈希冲突?
哈希冲突:不同的值元素,由哈希函数计算出的哈希值(hashcode)相同
解决方案:
JDK1.7中,在发生哈希冲突的索引处使用链表存放数据JDK1.8中,当链表长度大于阈值(默认为8)并且当前数组的长度大于64时,此时此索引位置上的所有数据改为使用红黑树存储
只有当链表长度大于阈值且数组的长度大于64时才会变为红黑树是因为,红黑树中有一些操作比如左旋,右旋,变色等来保持平衡,当数组很小并且阈值也很小的时候,基于这些平衡操作,红黑树的效率并不高;但是当数组长度大于64时,引入红黑树之后,效率就变高了。
什么是负载因子?为什么负载因子设置为0.75?
loadFactor:即我们常说的负载因子,它表示HashMap的疏密程度。
负载因子主要与HashMap的扩容有关,先来说说扩容。
当我们初始化一个HashMap时,数组的大小默认是16,HashMap中还有一个临界值值,临界值 = 数组大小 * 负载因子,当数组大小为16的时候,临界值 = 16 * 0.75 = 12,临界值的作用就是告诉HashMap何时扩容。也就是说,当加入HashMap的元素个数等于12的时候,HashMap会进行扩容,变成原来的两倍,即32。下一次发生扩容的时候,临界值等于32*0.75=24。
所以,你应该明白了吧,0.75的含义就是当加入的元素超过数组大小的75%时,HashMap就应该扩容了。
那么,为什么要当加入的元素超过数组大小的75%时才进行扩容呢?为什么不早点或者不晚点扩容呢?
这是因为,0.75实际上是一个"临界值",这个值大小适中。如果设置的太小,那么就会过早发生扩容;如果设置的太大,就会过晚发生扩容。而过早发生扩容,数组的利用率就会很低,因为这时候数组中加入的元素还不多;而过晚发生扩容,此时数组中的元素已经变得比较拥挤了,查找的时候效率已经比较低了。
HashMap为什么线程不安全?
首先,HashMap的线程不安全体现在三个方面:多线程下扩容造成的死循环、多线程下扩容造成的数据丢失、数据覆盖。其中,前两个问题在JDK1.8中已经得到解决。
扩容引发的死循环及数据丢失
原因主要存在于transfer函数中。
在JDK1.7中:
void transfer(Entry[] newTable, boolean rehash) {
int newCapacity = newTable.length;
for (Entry<K,V> e : table) {
while(null != e) {
Entry<K,V> next = e.next;
if (rehash) {
e.hash = null == e.key ? 0 : hash(e.key);
}
int i = indexFor(e.hash, newCapacity);
e.next = newTable[i];
newTable[i] = e;
e = next;
}
}
}
原因就是HashMap在扩容时,采用的是头插法,头插法会将链表的顺序翻转,这是形成死循环关键的地方。

依旧假设此时有两个线程,线程A和线程B。
当线程A执行到newTable[i] = e;时,时间片用完,轮到线程B执行。
此时,线程A中的数据是这样的:
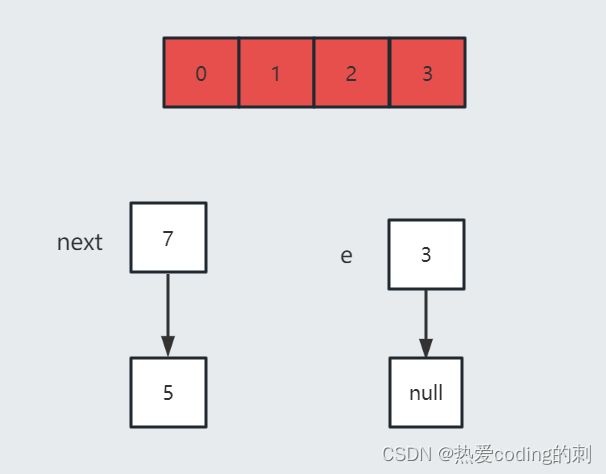
next = 7,e = 3,e.next = null
当线程B执行之后,数据已经成了扩容之后的样子。(见上图)
然后A得到时间片开始执行newTable[i] = e,执行完之后是这样

然后再继续执行,采用头插法:

按照源码继续走,结果如下:

很明显当线程A执行完后,HashMap中出现了环形结构,并且数据5莫名其妙的丢失了。
数据覆盖
死循环以及数据丢失只发生在JDK1.7中,在JDK1.8中已经得到解决。但是在JDK1.8中,多线程情境下会发生数据覆盖的问题。
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
if ((p = tab[i = (n - 1) & hash]) == null)//用来判断是否存在hash冲突,如果没有则直接插入
tab[i] = newNode(hash, key, value, null);
else {
Node<K,V> e; K k;
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
else {
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}
假设此时有两个线程,线程A和线程B,它们两个在经过哈希函数计算之后得到的插入下标是相同的,线程A先进行判断(此时线程B还没有插入),但是恰好当线程A在插入数据的前一刻时间片用完,那么线程A就停止运行了;然后线程B得到时间片,在此处插入数据。当线程B插入完成之后,线程A继续运行,由于之前已经判断过了,所以就不会再进行判断了,所以线程A会直接插入。由此所造成的结果就是,线程A后插入的数据覆盖了线程B之前插入的数据。
HashMap、HashTable和ConcurrentHashMap三者的区别?
经过以上分析,我们已经知道HashMap是线程不安全的。
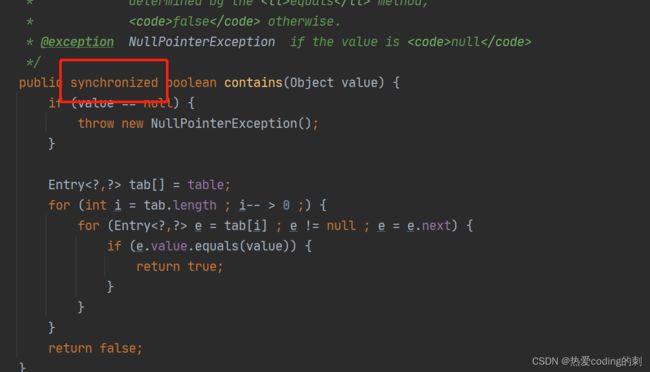
而HashTable是线程安全的,如果看过源码的小伙伴,就知道HashTable中的方法基本上都加了锁。由此所引发的问题就是,HashTable虽然保证了线程安全,但是HashTable在多线程下效率比较低。
concurrenthashmap使用了锁分段技术,容器里有多把锁,每一把锁只锁一部分数据,那么当多线程访问容器里不同数据时,线程间就不存在竞争,可以提高并发访问的效率

整理面经不易,觉得有帮助的小伙伴点个赞吧~感谢收看!