【STM32移植机智云】超详细教程#2ESP8266移植机智云教程‘代码移植’
1.引言
本人购买了一个ESP8266的WiFi模块,想做一个物联网控制小灯的demo。
本文记录了基于机智云平台,移植代码,实现物联网小灯详细操作步骤。
并不是移植步骤很麻烦,
只是文章真的写的极其详尽了
如此良心的文章,求个赞吧~~
文章目录
-
-
- 1.引言
- 2.准备材料
-
- 2.1硬件准备
-
- 2.1.1.ESP8266模块
- 2.1.2.单片机及杜邦线等
- 2.2 外设接线说明
-
- 2.2.1.ESP8266接线
- 2.2.2.其他外设接线
- 2.3.软件准备
-
- 2.3.1.STM32软件准备
- 2.3.2.ESP8266固件准备
- 3.源码分享
-
- 3.1.声明
- 3.2.参考代码工程下载:
- 4. 移植详细步骤
-
- 4.1机智云新建项目
-
- 4.1.1.新建项目
- 4.1.2.新建数据点
- 4.1.3.输入数据点的各个属性
- 4.2下载并导入代码包
-
- 4.2.1.下载移植代码包
- 4.2.2.导入移植代码包
- 4.3.配置单片机基础外设
-
- 4.3.1.串口配置
- 4.3.2.定时器配置
- 4.3.2.按键配置
- 4.3.3.LED配置
- 4.4.接入机智云接口
-
- 4.4.1 机智云读取串口3数据
- 4.4.2 机智云发送数据
- 4.4.3 机智云系统时间基准
- 4.4.4 实现系统复位
- 4.4.4 实现配置入网
- 4.4.5.数据下行
- 4.4.6.数据上行
- 4.4.7.主函数代码
- 5.实验结果验证
-
- 5.1.单片机操作
- 5.2.手机APP操作
- 6.常见问题分析
-
2.准备材料
2.1硬件准备
使用自制的STM32F103C8开发板为例,用杜邦线连接ESP8266模组,实现物联网控制小灯。
使用到的单片机外设:
- 定时器,定时1ms
- 串口1,打印调试信息
- 串口3,连接ESP8266
- 按键,用于配网控制
- LED,用于观察实验现象
硬件准备材料包括:
ESP8266模块和STM32F103C8单片机(板载串口1和3,LED)
2.1.1.ESP8266模块
外观:
引脚图:
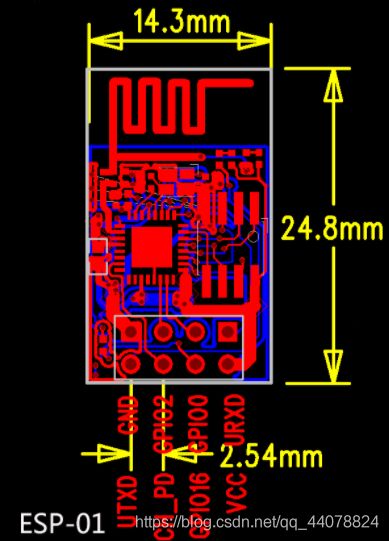
可能不同批次模块的引脚命名会略有不同,但是对应功能应该是相同的。
下面附上我所用模块的引脚功能说明:
| 名称 | 说明 |
|---|---|
| VCC | 电源 |
| GND | 地 |
| UTXD | 异步串口发送端(TTL 电平,可以直接接单片机RXD) |
| URXD | 异步串口接收端(TTL 电平,可以直接接单片机TXD) |
| GPIO16(/RST复位) | 外部复位引脚(默认电平是高电平,低电平有效) |
| GPIO0 | GPIO 0引脚用于区分工作模式:悬空状态,Flash下载模式和工作模式;下拉状态:串口固件烧写模式 |
| CH_PD(EN使能) | EN使能端口(高电平有效,低电平模块不工作) |
| GPIO2 | GPIO 2引脚,默认高电平,上电时禁止下拉 |
2.1.2.单片机及杜邦线等
自制的STM32F103C8单片机,板载串口1和3,LED,按键等外设。
2.2 外设接线说明
2.2.1.ESP8266接线
| ESP8266引脚 | 接口 |
|---|---|
| VCC | 单片机VCC(3.3V) |
| CH_PD(EN使能引脚) | 单片机VCC(3.3V) |
| GND | 单片机GND |
| UTXD | 单片机串口3的RXD引脚(即USART3_RX PB11) |
| URXD | 单片机串口3的TXD引脚(即USART3_TX PB10) |
| GPIO0 | 悬空 |
| GPIO16(/RST复位) | 外部复位引脚(默认电平是高电平,低电平有效),这里悬空或者接VCC3.3V |
| GPIO2 | 悬空 |
2.2.2.其他外设接线
| 外设 | 引脚 |
|---|---|
| 按键 | PA0 |
| LED0 | PA8 |
| 串口1 | PA9,PA10 |
2.3.软件准备
2.3.1.STM32软件准备
忠言相劝:
本博客经过本人21年多次移植验证的,是可行的。
编写代码要一步一步来调试,没有问题了再进行下一步。
别直接一股脑的移植代码,不少小伙伴直接移植也不管前面外设是否正确,出了问题我也无法快速找到。
这时候 “认为辣鸡博客,浪费时间”,这个锅实在不应该我来背 。
回到正题,
请先确保按键、定时器、串口、LED都是可以正常工作的,
再进行机智云的代码移植。
比如:先验证按键可以控制LED,串口可以正常收发,定时器定时打印输出等。
2.3.2.ESP8266固件准备
ESP8266要先烧录了机智云的固件。
教程参见:烧录机智云固件详细教程
烧录程序工具包下载:烧录固件工具包下载
3.源码分享
3.1.声明
本博客及代码只做学习交流,不做商业用途。
旨在帮助大家,在移植时少走点弯路。
纯粹用爱发电,简洁无套路,有帮助的话,麻烦点赞评论收藏支持一下。
可以的话,求个关注。
3.2.参考代码工程下载:
方式一:代码工程打包下载
财力雄厚,麻烦支持一下。感谢。
方式二:见评论区置顶的那条。(括号是防止和谐,若失效了,评论或私聊)
4. 移植详细步骤
4.1机智云新建项目
4.1.1.新建项目
百度进入机智云官网,登录机智云(没有账号就先注册)。
在开发者中心新建项目,这里产品名称,我暂定命名为test

4.1.2.新建数据点

4.1.3.输入数据点的各个属性
如想控制LED亮灭。各个属性填写如下图。不懂的,点问号有提示。
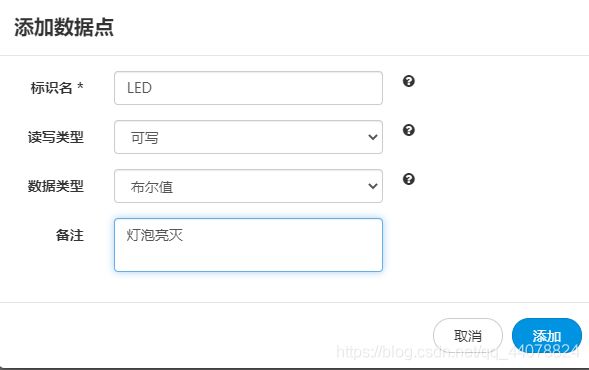
下面简单解释一下。
- 标识名:与单片机代码中的变量名称相关。不要用中文,只可以用字母数字下划线。
- 读写类型:这里我需要控制点亮或者熄灭led。故选可写。
- 数据类型:只有点亮或者熄灭led两个状态,故选bool值。
- 备注:这个给人看的,就写一些自己可以看懂的注释信息即可。
然后,应用修改。

4.2下载并导入代码包
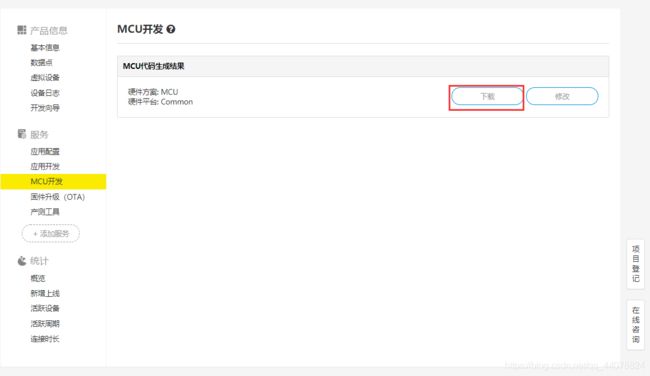
4.2.1.下载移植代码包
复制秘钥,因为下载需要填写。
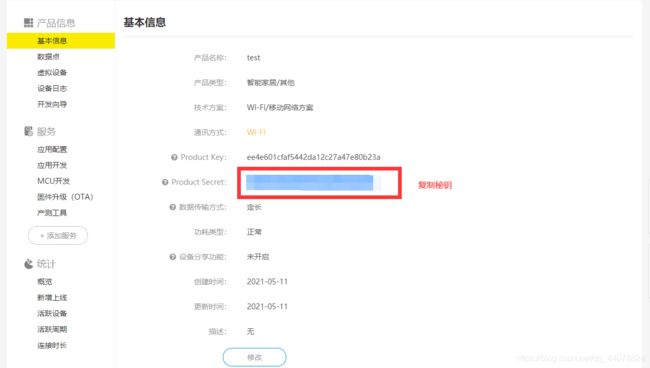
如下图生成代码包。

下载代码包:
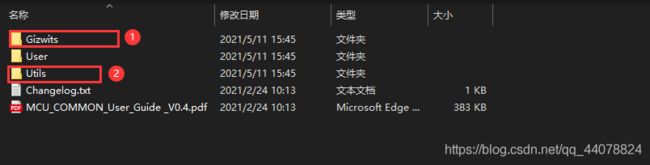
4.2.2.导入移植代码包
下载后解压,将下图俩个复制到自己的工程。
导入代码包到STM32工程。
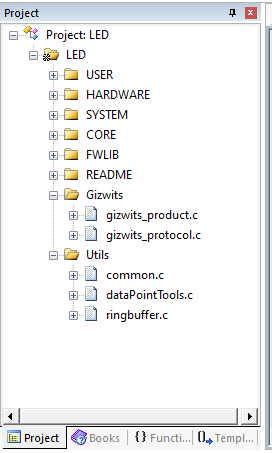
记得包含头文件位置。
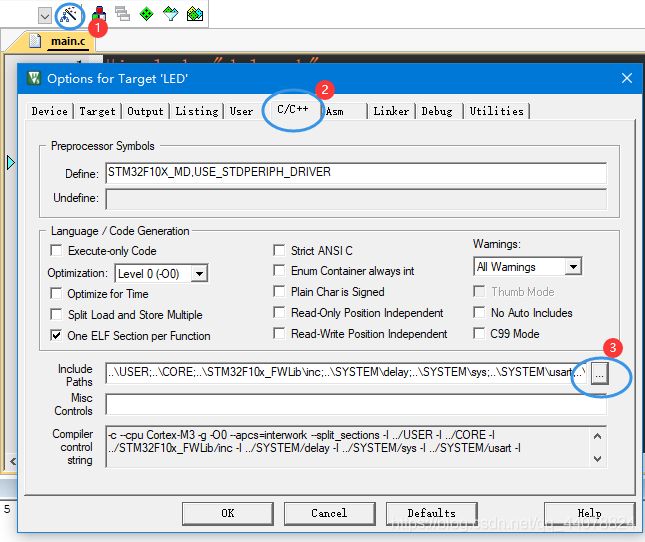
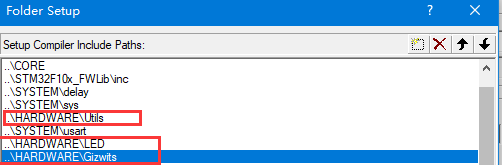
注意:路径地址因人而异。
4.3.配置单片机基础外设
再次强调,
请先确保按键、定时器、串口、LED 等基础外设都是可以正常工作的,并进行简单验证后,再进行机智云代码接口的接入。
“4.3.配置单片机基础外设”均作为外设配置的参考。
4.3.1.串口配置
- 串口1(用于printf打印调试信息)
感谢用户_tony_jia的反馈,让我更加完善博客的分享。
这里贴出串口的所有代码。
uart.c的代码如下:
#include "sys.h"
#include "usart.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
//
//此段代码参考自正点原子@ALIENTEK
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
/*使用microLib的方法*/
/*
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {}
return ch;
}
int GetKey (void) {
while (!(USART1->SR & USART_FLAG_RXNE));
return ((int)(USART1->DR & 0x1FF));
}
*/
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
#endif
uart.h代码:
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
#include "sys.h"
#define USART_REC_LEN 200 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
extern u16 USART_RX_STA; //接收状态标记
//如果想串口中断接收,请不要注释以下宏定义
void uart_init(u32 bound);
#endif
- 串口3(用于和esp模块通信)
本文中,将esp模块连接在串口3,故需要配置串口3。
初始化串口3参考代码:
//初始化IO 串口3
//与ESP8266模块通信波特率:9600
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void usart3_init(u32 bound)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能
USART_DeInit(USART3); //复位串口3
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 PB11
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3
USART_Cmd(USART3, ENABLE); //使能串口
//使能接收中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
//设置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART3_RX_STA=0; //清零
}
4.3.2.定时器配置
定时器用于和给esp模块提供基准时钟。
本文采用定时器3,需要配置1ms的定时。
参考代码:
// 定时器3,定时1ms
void TIMER3_Init()
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//初始化
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
// 72MHz
TIM_TimeBaseInitStruct.TIM_Period=10-1;
TIM_TimeBaseInitStruct.TIM_Prescaler=7200-1;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
TIM_ClearFlag(TIM3, TIM_IT_Update);
TIM_ITConfig(TIM3, TIM_IT_Update,ENABLE);
NVIC_InitStruct.NVIC_IRQChannel=TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&NVIC_InitStruct);
TIM_Cmd(TIM3,ENABLE);
}
4.3.2.按键配置
按键用于机智云配网。
本文采用外部中断方式实现按键控制配网。
按键PA0,当按下时,接地。故配置上拉、下降沿。
参考代码:
//外部中断0服务程序
void KEY_EXTIX_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能
//初始化 WK_UP-->GPIOA.0 上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //PA0设置成上拉输入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
//GPIOA.0 中断线以及中断初始化配置 下升沿触发 PA0 WK_UP
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line=EXTI_Line0;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;//选择外部中断而不是外部事件
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;//下降沿产生中断
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键WK_UP所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00; //抢占优先级0,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
4.3.3.LED配置
LED的IO初始化。
//LED IO初始化
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //LED0-->PA.8 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA.8
GPIO_SetBits(GPIOA,GPIO_Pin_8); //PA.8 输出高
}
4.4.接入机智云接口
注:以下步骤,执行一步就编译一下。
若现在找不到XX函数,则包含对应的头文件或者声明函数。
注意要清除所有的警告。
4.4.1 机智云读取串口3数据
接口函数:gizPutData(&value, 1)
参考调用代码:
void USART3_IRQHandler(void)
{
u8 value = 0;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)//接收到数据
{
value = USART_ReceiveData(USART3); //读取接收到的数据
gizPutData(&value, 1);
// USART_SendData(USART3,value);
}
}
4.4.2 机智云发送数据
补充完整接口函数:int32_t uartWrite(uint8_t *buf, uint32_t len)
位置:gizwits_product.c
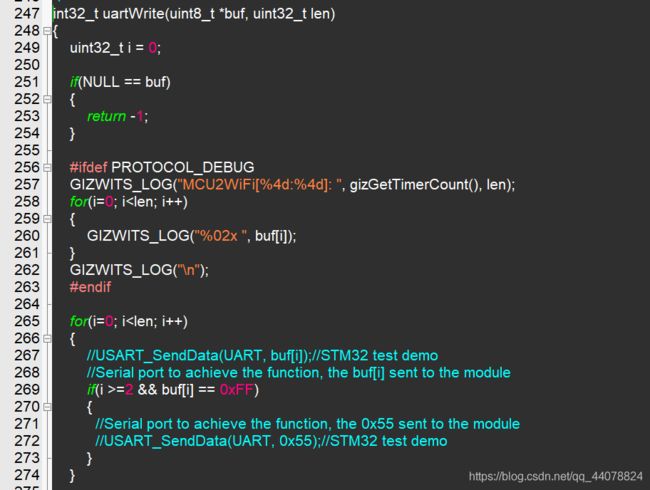
让其调用串口3的发送。
补充后参考代码:
int32_t uartWrite(uint8_t *buf, uint32_t len)
{
uint32_t i = 0;
if(NULL == buf)
{
return -1;
}
#ifdef PROTOCOL_DEBUG
GIZWITS_LOG("MCU2WiFi[%4d:%4d]: ", gizGetTimerCount(), len);
for(i=0; i<len; i++)
{
GIZWITS_LOG("%02x ", buf[i]);
}
GIZWITS_LOG("\n");
#endif
for(i=0; i<len; i++)
{
//USART_SendData(UART, buf[i]);//STM32 test demo
//Serial port to achieve the function, the buf[i] sent to the module
USART_SendData(USART3, buf[i]);
while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
if(i >=2 && buf[i] == 0xFF)
{
//Serial port to achieve the function, the 0x55 sent to the module
//USART_SendData(UART, 0x55);//STM32 test demo
USART_SendData(USART3, 0x55);
while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET);
}
}
return len;
}
4.4.3 机智云系统时间基准
在前面配置的定时器3(注意是:1ms定时),
中断服务函数中调用接口gizTimerMs()
参考代码:
void TIM3_IRQHandler()
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update))
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
gizTimerMs();
}
}
4.4.4 实现系统复位
补充接口:mcuRestart
实现系统复位功能。
位置:如图

参考代码:
/**
* @brief mcuRestart
* MCU Reset function
* @param none
* @return none
*/
void mcuRestart(void)
{
__set_FAULTMASK(1);
NVIC_SystemReset();
}
4.4.4 实现配置入网
支持 SoftAp 和 AirLink 两种方式配置入网,相应接口为 gizwitsSetMode()。
这里我希望ESP8266和手机连接同一WiFi,AirLink 更方便,本设计采用外部中断按键调用的方式。
参考代码:
//外部中断0服务程序
void EXTI0_IRQHandler(void)
{
delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0)==0) //下降沿触发
{
gizwitsSetMode(WIFI_AIRLINK_MODE);
printf("\r\nWIFI_AIRLINK_MODE\r\n") ; // 打印调试信息
}
EXTI_ClearITPendingBit(EXTI_Line0); //清除LINE0上的中断标志位
}
至此,stm32已经可以联网了。
4.4.5.数据下行
本文以控制LED0点亮、熄灭为例。
在下图位置添加控制代码。
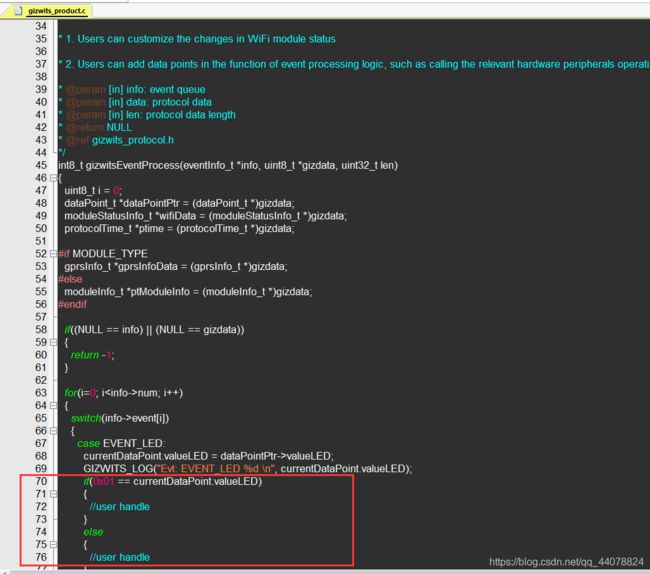
参考代码:这里使用LED0 = 1或0控制亮灭。
int8_t gizwitsEventProcess(eventInfo_t *info, uint8_t *gizdata, uint32_t len)
{
uint8_t i = 0;
dataPoint_t *dataPointPtr = (dataPoint_t *)gizdata;
moduleStatusInfo_t *wifiData = (moduleStatusInfo_t *)gizdata;
protocolTime_t *ptime = (protocolTime_t *)gizdata;
#if MODULE_TYPE
gprsInfo_t *gprsInfoData = (gprsInfo_t *)gizdata;
#else
moduleInfo_t *ptModuleInfo = (moduleInfo_t *)gizdata;
#endif
if((NULL == info) || (NULL == gizdata))
{
return -1;
}
for(i=0; i<info->num; i++)
{
switch(info->event[i])
{
case EVENT_LED:
currentDataPoint.valueLED = dataPointPtr->valueLED;
GIZWITS_LOG("Evt: EVENT_LED %d \n", currentDataPoint.valueLED);
if(0x01 == currentDataPoint.valueLED)
{
//user handle
LED0 = 0;// 低电平点亮
}
else
{
//user handle
LED0 = 1; // 高电平熄灭
}
break;
case WIFI_SOFTAP:
break;
case WIFI_AIRLINK:
break;
case WIFI_STATION:
break;
case WIFI_CON_ROUTER:
break;
case WIFI_DISCON_ROUTER:
break;
case WIFI_CON_M2M:
break;
case WIFI_DISCON_M2M:
break;
case WIFI_RSSI:
GIZWITS_LOG("RSSI %d\n", wifiData->rssi);
break;
case TRANSPARENT_DATA:
GIZWITS_LOG("TRANSPARENT_DATA \n");
//user handle , Fetch data from [data] , size is [len]
break;
case WIFI_NTP:
GIZWITS_LOG("WIFI_NTP : [%d-%d-%d %02d:%02d:%02d][%d] \n",ptime->year,ptime->month,ptime->day,ptime->hour,ptime->minute,ptime->second,ptime->ntp);
break;
case MODULE_INFO:
GIZWITS_LOG("MODULE INFO ...\n");
#if MODULE_TYPE
GIZWITS_LOG("GPRS MODULE ...\n");
//Format By gprsInfo_t
#else
GIZWITS_LOG("WIF MODULE ...\n");
//Format By moduleInfo_t
GIZWITS_LOG("moduleType : [%d] \n",ptModuleInfo->moduleType);
#endif
break;
default:
break;
}
}
return 0;
}
4.4.6.数据上行
函数接口:void userHandle(void)
添加方法如图:
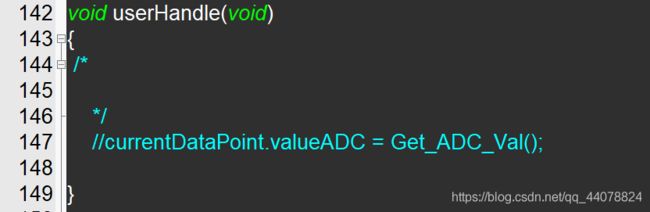
本教程没有建立上行数据点。故没有代码。
4.4.7.主函数代码
参考代码:
注意波特率为9600
//机智云初始化
void MyGizwistInit(void)
{
TIMER3_Init();//1ms
usart3_init(9600);//gizPutData((uint8_t *)&aRxBuffer,1);
userInit();//用户信息初始化,目前只是把结构体信息复位
gizwitsInit();//机智云的初始化
printf("gizwitsInit智能云初始化\r\n");
}
// 主函数
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//1设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init(115200); // 串口1初始化
LED_Init(); // 初始化LED
KEY_EXTIX_Init(); // 初始化KEY
MyGizwistInit();
while(1)
{
userHandle();//数据上行
gizwitsHandle((dataPoint_t *)¤tDataPoint);
}
}
5.实验结果验证
5.1.单片机操作
编译烧录程序,连接串口,打开调试助手。
5.2.手机APP操作
在机智云官网下载安装对应的app。
参考连接:https://download.gizwits.com/zh-cn/p/98/99
打开手机app,依次进行操作:
这里选择工作WiFi,需要自己手动选择WiFi并输入密码。
确保WiFi和密码正确,且手机和ESP8266能连接上同一个WiFi。

单片机按下按键,进入配网。 等待配网完成
注意:
如果进度走完,还没有连接成功,会显示连接超时,大概率是配置有问题。
请检查:
- 1.挨个步骤检查移植配置:外设、机智云接口接入等(建议消除所有警告)
- 2.确保手机与ESP可以连接同一WiFi,且能正常访问互联网
- 3.WiFi不能是5gHz的频段(若WiFi是另外一台手机的热点,不要限制连接个数,也不要将ESP拉黑,ESP无法连接wifi会导致配网超时)
正常连接的串口打印调试信息,如下。

手机界面会出现设备。
点击连接"test"(前面输入的产品名称)。


点击开启,即可以点亮LED了。
步骤操作到这里,就恭喜大家成功联网控制。
谢谢大家的阅读。
有问题欢迎评论交流。
码字不易,麻烦点赞评论收藏支持一下
6.常见问题分析
形如串口打印如下错误:
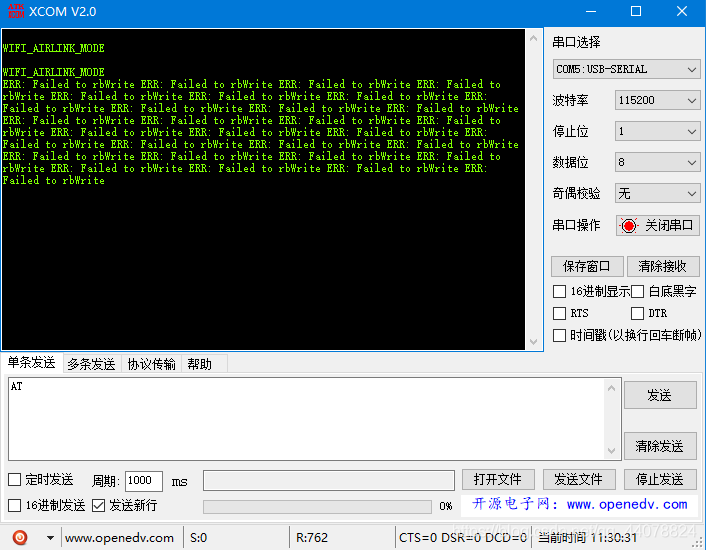
检查原因:
1.串口波特率错误,esp通信波特率9600.
2.串口配置引脚错误。rx与tx要反接,引脚、端口不要写错。
注意esp接了别的串口,对应的串口的代码都要改过来。
其他情况:
3.定时器计算错误,定时器应该为1ms。
4.按键配置出错,配置打印调试,确保按键有效。
5.玄学问题–接触不良,或者接错线,,,,,
6.使用问题,比如gizwitsHandle()要多调用,上面的代码是放在了主循环。注释了这个函数可能直接导致联网失败。。。
7.编译警告。某些警告会导致移植失败,建议规范编程,清除掉所有警告。。。