《动手学ROS2》4.3ROS2话题通信(C++)
本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

4.2.2 ROS2话题通信(C++实现)
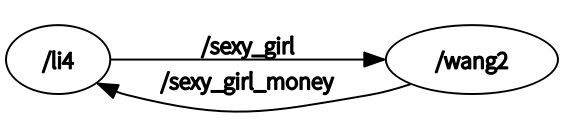
本节小鱼将带你一起实现C++版本话题通信功能,帮助单身汉王二拿到他最想看的艳娘传奇,并通过话题支付稿费给李四。最终实现像下图这样的计算图。

1.订阅话题
1.1 如何编写
在C++中如何实现话题的订阅呢?其实做法和Python中差不多。还记得第三章中我们新建的SingleDogNode类的定义吗?
class SingleDogNode : public rclcpp::Node
SingleDogNode继承了Node节点,其实Node可以理解为一个类,SingleDogNode继承了Node后就会拥有Node类所具备的能力和知识。
和python中WriterNode继承的Node类一样,本节中会使用SingleDogNode继承而来的三种能力:
-
创建一个话题订阅者的能力,用于拿到艳娘传奇的数据
rclcpp::Subscription -
创建一个话题发布者的能力,用于给李四送稿费
rclcpp::Publisher -
获取日志打印器的能力
// 打印一句自我介绍 RCLCPP_INFO(this->get_logger(), "大家好,我是单身汉王二.");
更多的能力可以参考rclcpp的API:https://docs.ros2.org/foxy/api/rclcpp/index.html
1.2 代码实现
创建话题订阅者的一般流程:
- 导入订阅的话题接口类型
- 创建订阅回调函数
- 声明并创建订阅者
- 编写订阅回调处理逻辑
用VsCode打开上一章中town_ws工作空间,并打开wang2.cpp。我们在其中添加代码即可。
添加完成后SingleDogNode类中代码如下:
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include "std_msgs/msg/u_int32.hpp"
using std::placeholders::_1;
using std::placeholders::_2;
/*
创建一个类节点,名字叫做SingleDogNode,继承自Node.
*/
class SingleDogNode : public rclcpp::Node
{
public:
// 构造函数,有一个参数为节点名称
SingleDogNode(std::string name) : Node(name)
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是单身狗%s.", name.c_str());
// 创建一个订阅者来订阅李四写的小说,通过名字sexy_girl
sub_novel = this->create_subscription("sexy_girl", 10, std::bind(&SingleDogNode::topic_callback, this, _1));
}
private:
// 声明一个订阅者(成员变量),用于订阅小说
rclcpp::Subscription::SharedPtr sub_novel;
// 收到话题数据的回调函数
void topic_callback(const std_msgs::msg::String::SharedPtr msg)
{
RCLCPP_INFO(this->get_logger(), "朕已阅:'%s'", msg->data.c_str());
};
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个Wang2的节点*/
auto node = std::make_shared("wang2");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
1.3代码讲解
对比python,我们使用C++订阅话题,步骤基本相同,需要添加对应的消息类型头文件:
#include "std_msgs/msg/string.hpp"
#include "std_msgs/msg/u_int32.hpp"
创建订阅者和发布者时依然使用this->create_subscription和this->create_publisher方法。
C++中创建一个订阅者,需要传入话题类型、话题名称、所要绑定的回调函数,以及通信Qos(这里我们写10即可,后面小鱼会给大家讲解)。
std::bind()
C++的类成员函数不能像普通函数那样用于回调,因为每个成员函数都需要有一个对象实例去调用它。
通常情况下,要实现成员函数作为回调函数:一种过去常用的方法就是把该成员函数设计为静态成员函数(因为类的成员函数需要隐含的this指针 而回调函数没有办法提供),但这样做有一个缺点,就是会破坏类的结构性,因为静态成员函数只能访问该类的静态成员变量和静态成员函数,不能访问非静态的,要解决这个问题,可以把对象实例的指针或引用做为参数传给它。
后面就可以靠这个对象实例的指针或引用访问非静态成员函数。另一种办法就是使用std::bind和std::function结合实现回调技术。
2.订阅测试
完成上面的代码后,我们就可以进行测试了。
2.1 编译运行
colcon build --packages-select village_wang

source运行
source install/setup.bash
ros2 run village_wang wang2_node

2.2 运行李四节点
使用Ctrl+Shift+5切分一个终端出来,输入下面命令:
source install/setup.bash
ros2 run village_li li4_node
运行结果

3.发布(支付)稿费
李四也要过日子的,过日子就需要money。王二也不能白看,所以王二需要支付稿费。我们上一节中已经给李四新建了订阅者订阅话题sexy_girl_money来收取稿费了。现在我们要给王二写一个发布者,来送稿费给李四,鼓励一下李四继续创作。
3.1 如何发布
C++中创建一个发布者也比较简单,使用this->create_publisher即可创建一个发布者。
pub_ = this->create_publisher("sexy_girl_money",10);
这里提供了三个参数,分别是该发布者要发布的话题名称(sexy_girl_money)、发布者要发布的话题类型(std_msgs::msg::UInt32)、Qos(10)
3.2 代码编写
我们来看一下增加发布者之后的完整代码
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include "std_msgs/msg/u_int32.hpp"
using std::placeholders::_1;
using std::placeholders::_2;
/*
创建一个类节点,名字叫做SingleDogNode,继承自Node.
*/
class SingleDogNode : public rclcpp::Node
{
public:
// 构造函数,有一个参数为节点名称
SingleDogNode(std::string name) : Node(name)
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是单身狗%s.", name.c_str());
// 创建一个订阅者来订阅李四写的小说,通过名字sexy_girl
sub_novel = this->create_subscription("sexy_girl", 10, std::bind(&SingleDogNode::topic_callback, this, _1));
// 创建发布者
pub_money = this->create_publisher("sexy_girl_money", 10);
}
private:
// 声明一个订阅者(成员变量),用于订阅小说
rclcpp::Subscription::SharedPtr sub_novel;
// 声明一个发布者(成员变量),用于给李四钱
rclcpp::Publisher::SharedPtr pub_money;
// 收到话题数据的回调函数
void topic_callback(const std_msgs::msg::String::SharedPtr msg)
{
// 新建一张人民币
std_msgs::msg::UInt32 money;
money.data = 10;
// 发送人民币给李四
pub_money->publish(money);
RCLCPP_INFO(this->get_logger(), "朕已阅:'%s',打赏李四:%d 元的稿费", msg->data.c_str(), money.data);
};
};
程序主要将回调函数修改了一下,每次收到了小说之后,王二就会发10块钱到sexy_girl_money话题上。
4.发布测试
4.1 编译运行王二
colcon build --packages-select village_wang
source运行
source install/setup.bash
ros2 run village_wang wang2_node
4.2运行李四节点
source install/setup.bash
ros2 run village_li li4_node
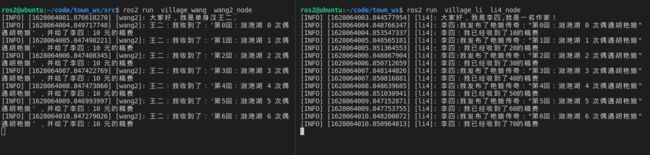
4.3 查看计算图
运行过程中,我们打开新的终端,输入rqt_graph。这时可以看到李四和王二之间的所有关系。
rqt_graph
5.总结
通过本节的学习,我们学会如何使用C++来发布或者订阅一个话题的数据了。下一节小鱼会提供一个练习示例,快来动手尝试吧。
作者介绍:
我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚
初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金)
目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人