ADRC自抗扰控制,有手就行
ADRC自抗扰控制,有手就行
关于ADRC的优点本人不会赘述,毕竟作为一个ADRC算法都推导不出来的应用工程师,最希望看到的就是有手就行的操作方法。ARC的缺点就显而易见,就是参数多,一环ADRC大概就有11个参数,但一个粗略的效果很快就出来。本文所有的言论仅以我最近的一次速度闭环控制经验之谈,并没有经过大量的实验验证其绝对正确性,慎用(注:文中公式来自于csdn用户:遥远的乌托邦,有稍作修改)。
ADRC说白了就是PID的升级版,保留了PID的优点,改良了PID的缺点,其结构和PID一样,ADRC可以被看作三个作用效果的结合,分别是TD(跟踪微分器)、ESO(扩张状态观测器)、NLSEF(非线性控制律)。TD是为了防止目标值突变而安排的过渡过程;ADRC的灵魂就在于ESO,其作用下文给客官细细道来;NLSEF是为了改良PID直接线性加权(输出=比例+积分+微分)的缺点而引进的非线性控制律,其更符合非线性系统。
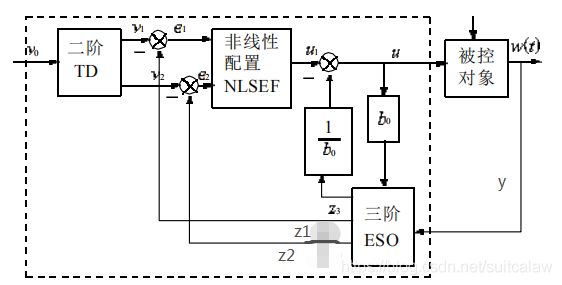
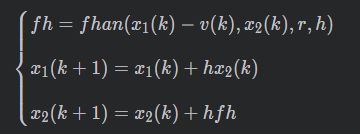
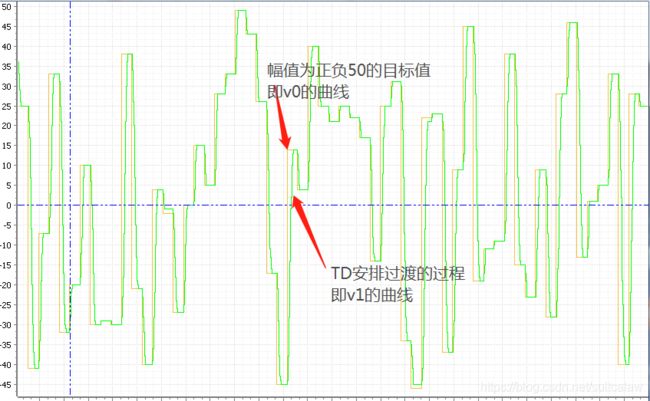
从上图看到TD只有输入v0(系统的目标值),其输出的v1为v0的过渡过程,例如v0原先是0,突然将v0改成10,那么v0就有个突变,而v1不会随v0突变,而是慢慢的爬升到v0,不会有静差也不会有超调,v1的爬升时间取决于TD参数(具体TD参数在下文给出并做解析)调整,也可以调整成跟随v0突变。v2是v1的导数,即v1的微分。
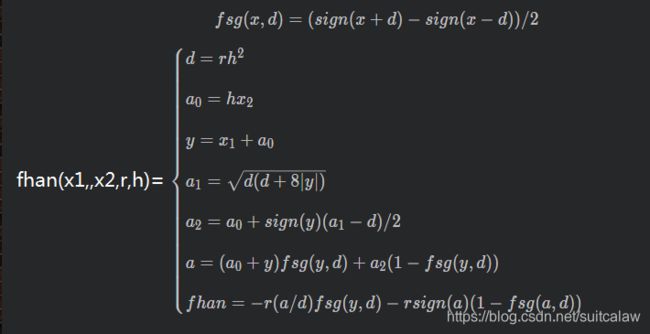
其数学公式如下:
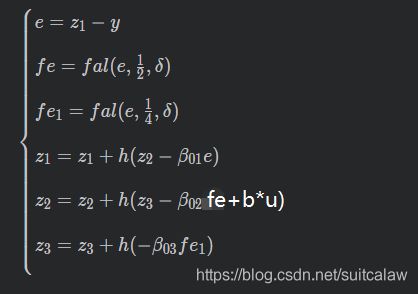
上图中可以看出ESO的输入是有两项,一项是反馈值y,另一项是输出值u *b0(b0被称为系统系数)。输出则为z1、z2、z3;z1和z2是被称为系统的两个状态,z1的数值是跟随着输出y的,假若系统闭环成功的话,z1,、y、v1三个数值应该是一样的。z2是跟随y的微分的,加入系统闭环成功的话,z2、y的微分、v2三个数值应该是一样的。z3是系统扩张的一个状态,观测的是系统的总扰动,z3是自抗扰的灵魂所在。
ESO数学公式:
NLSEF输入是e1(e1=v1-z1)、e2(e2=v2-z2),其输出是u1,u1并没有叠加系统总扰动补偿,它只是NLSEF的输出,并不是系统的最终输出。系统最终的输出是直接作用到被控对象的量u(u=u-z3/b)。
w(t)是假定的一个系统总扰动。
NLSEF的数学公式有几种那么多,本人仅使用了第二种:

/******************ADRC program with C********************
// write by suitcalaw
// copy by the high hand net world
// https://blog.csdn.net/b457738242
**********************2020-12-07*************************/
//参数区,这11个就是需要用户整定的参数
/****************TD**********/
float r = 0,//快速跟踪因子
h = 0;//滤波因子,系统调用步长
/**************ESO**********/
float b = 0,//系统系数
delta = 0,//delta为fal(e,alpha,delta)函数的线性区间宽度
belta01 = 0,//扩张状态观测器反馈增益1
belta02 = 0,//扩张状态观测器反馈增益2
belta03 = 0;//扩张状态观测器反馈增益3
/**************NLSEF*******/
float alpha1 = 0,//
alpha2 = 0,//
belta1 = 0,//跟踪输入信号增益
belta2 = 0;//跟踪微分信号增益
/*****************************fhan函数*********************************/
float fhan(float x1,float x2,float r,float h)
{
/*****************************第一套************************/
// float d = 0,
// a = 0,
// a0 = 0,
// a1 = 0,
// a2 = 0,
// y = 0,
// fhan = 0;
//
// d = r*h*h;
// a0 = h*x2;
// y = x1+a0;
// a1 = sqrtf(d*(d+8*fabsf(y)));
// a2 = a0 + sign(y)*(a1 - d)/2.0;
// a = (a0+y)*(sign(y+d)-sign(y-d))/2.0 + a2*(1-(sign(y+d)-sign(y-d))/2.0);
// fhan = -r*(a/d)*(sign(y+d)-sign(y-d))/2.0 - r*sign(a)*(1-(sign(a+d)-sign(a-d))/2.0);
/******************************第二套**********************/
float deltaa =0,
deltaa0 =0,
y =0,
a0 =0,
a =0,
fhan =0;
deltaa = r*h;
deltaa0 = deltaa*h;
y=x1+x2*h;
a0 = sqrtf(deltaa*deltaa+8*r*fabsf(y));
if(fabsf(y)<=deltaa0)
a=x2+y/h;
else
a=x2+0.5*(a0-deltaa)*sign(y);
if(fabsf(a)<=deltaa)
fhan = -r*a/deltaa;
else
fhan = -r*sign(a);
return fhan;
}
/************************************sign函数***************************/
float sign(float x)
{
if(x>0)
return 1;
else if(x<0)
return -1;
else
return 0;
}
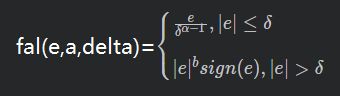
/*******************************fal函数**********************************/
float fal(float e,float alpha,float delta)
{
float result = 0,fabsf_e = 0;
fabsf_e = fabsf(e);
if(delta>=fabsf_e)
result = e/powf(delta,1.0-alpha);
else //if(delta
result = powf(fabsf_e,alpha)*sign(e);
return result;
}
//中间变量区,不需要用户管理以及赋值
/****************TD*******************/
float x1 = 0,//跟踪输入
x2 = 0,//跟踪输入的微分
/****************ESO******************/
e = 0,//误差
z1 = 0,//跟踪反馈值
z2 = 0,//跟踪反馈值的而微分
z3 = 0,//跟踪系统的扰动(总扰动)
/**************NLSEF******************/
u = 0;//输出值
/********************************ADRC************************************/
float ADRC(float v,float y) // 参数:v:输入的目标值; y:反馈值
{
float u0 = 0,
e1 = 0,
e2 = 0;
/******************************TD****************************************/
x1 = x1 + h*x2;
x2 = x2 + h*fhan(x1-v,x2,r,h);
/******************************ESO***************************************/
e = z1 - y;
z1 = z1 + h*(z2-belta01*e);
z2 = z2 + h*(z3-belta02*fal(e,0.5,delta)+b*u);
z3 = z3 + h*(-belta03*fal(e,0.25,delta));
/******************限幅,ADRC正常的话不会达到限幅条件********************/
if(z1>=30000) z1=30000;
if(z1<=-30000) z1 = -30000;
if(z2>=30000) z2=30000;
if(z2<=-30000) z2 = -30000;
if(z3>=30000) z3=30000;
if(z3<=-30000) z3 = -30000;
/******************************NLSEF*************************************/
e1 = x1 - z1;
e2 = x2 - z2;
u0 = belta1*fal(e1,alpha1,delta) + belta2*fal(e2,alpha2,delta);//其中0
u = u0 - z3/b;
return u;
}
代码是根据上面的公式直接撸过来的,下图是ADRC的11个参数,就是我们需要整定的参数了。
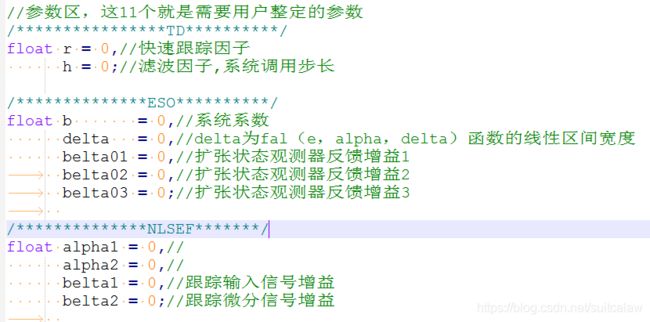
参数整定的规律是先将TD参数整定好,再整定ESO和NLSEF。
TD的参数整定是最简单的,观测v1的输出和输入v0的线性,其跟随的快慢并没有规定一定要多快多慢,取决于你想要的效果。TD参数只有两个:快速因子r 和滤波因子h 。其中,r 与跟踪速度呈正相关,然而,随之带来的是噪声放大的副作用;h与滤波效果呈正相关,但当h增大时,跟踪信号的相位损失也会随之增加。滤波因子经常取值为ADRC控制周期,比如1ms调用一次,h就是0.001,这也不是死定的,可以根据自己的效果做细微调整。
ESO共有b、delta、belta01、belta02、belta03共5个参数,其中delta取值范围在5h<=delta<=10h,h为ADRC控制周期。参数整定可以先将b定下来,比如取1或者2(最好还是能够知道你的二阶系统系数),然后先后调整belta01、belta02、belta03,观测z1能不能够很好的跟随反馈y,如果是,那么大概参数就调好了;如果不是,可以改动一下b,还是不行的话就得认认真真的检测一下反馈y是不是出了什么问题,比如变量数据类型转换有没有做好。如果懂得自己在输出中加入随机数(白噪声),注意幅值不能过大,观测一下z3是不是能够很好的观测到随机扰动。若以上两个条件都成立,那么ADRC就几乎被整定好了。
NLSEF参数有alpha1,alpha2,belta1,belta2四个,其中0