【控制系统的数学模型——传递函数】
目录
0.前言
0.1 自动控制理论发展
0.2 自动控制系统的基本结构及工作原理
0.3 自动控制系统的分类
0.4 自动控制系统的基本要求
1. 数学模型
1,1描述系统运动的数学模型
1.2 建立系统数学模型的方法
1.3 用解析法建立系统微分方程的一般步骤
2. 传递函数
2.1 传递函数的定义
2.2 传递函数的性质
2.3方框图
2.4 系统信号流图和梅逊公式
3. 带扰动的反馈控制系统
3.1 系统的开环传递函数
3.2 系统的闭环传递函数
4. 闭环系统的误差传递函数
5. 总结
0.前言
0.1 自动控制理论发展
人类最初使用的机械是杠杆,通过杠杆,人可以移动直接用手不能移动的重物;发明利用自然力(如风车和水车的使用)是人用机械动力把自己从繁重的体力劳动中解脱出来的开始,机械开始不断地由简单变复杂;蒸汽机和电动机的发明,为机械提供了有效并且使用方便的动力,同时也提出了机械自动化问题。

0.2 自动控制系统的基本结构及工作原理
所谓自动控制,是指在没人直接参与的情况下,利用外加设备或装置使被控对象或过程按照预定的规律运行。能够实现自动控制任务的系统称为自动控制系统。简单的自动控制系统通过机械系统自身的机构实现检测调节功能,如水位控制系统、蒸汽机转速控制系统等。但随着科学技术的发展,机械系统越来越复杂,将机械与电子融合在一起逐渐产生了机电一体化系统。反馈控制系统是完整而典型的自动控制系统·。


- 被控对象:在控制系统中,其运动规律或状态需要控制的装置称为被控对象,如教材中位置控制系统中的工作台。
- 被控量:表征被控对象运动规律或状态的物理量,即输出量,如位置控制系统中工作台的位移。
- 执行元件:控制系统中直接对被控对象进行操作的元件,如位置控制系统中的伺服电动机、减速器、滚珠丝杠和直线导轨等。
- 控制器:接受偏差信号,通过转换和运算产生控制量的元件,如位置控制系统中的PI(Proportion-Integration,比例-积分>控制器。
- 控制量:为控制输出量按预定规律变换必须提供给系统的物理量,通常为电压或电流。放大元件:控制系统中对偏差信号进行幅值放大或功率放大的元件,如位置控制系统中的前置放大器。
- 比较元件:控制系统中用以比较输入信号与反馈信号,而输出偏差信号的元件,如位置控制系统中的比较器。
- 给定元件:控制系统中主要用于产生给定信号(输人信号)的元件,如位置控制系统中的给定电位器。
- 反馈元件:控制系统中用于测量输出量,产生反馈信号的元件,如位置控制系统中的反馈电位器。
- 偏差:系统输入量与反馈量之差,位置控制系统中比较环节的输出,如位置控制系统中给定电位器输入ua与检测电位器输出u,的差。
- 干扰:偶然的、无法加以人工控制的信号。
0.3 自动控制系统的分类
机械自动控制系统可按照控制系统有无反馈环节、控制系统中的信号类型、控制变量的多少、系统参数变化规律、系统本身的动态特性和系统采用的控制方法等进行


0.4 自动控制系统的基本要求
对控制系统的要求可简要概括为三个字:稳、快、准。
1)稳定性
稳定性是指系统在受到外部作用之后的动态过程的倾向和恢复平衡状态的能力。不稳定的系统是无法工作的。因此,控制系统的稳定性是控制系统分析和设计的首要内容。
2)快速性
系统在稳定的前提下,响应的快速性是指系统消除实际输出量与稳态输出量之间误差的快慢程度。反映系统敏捷性:动态过程要短且震荡要适中。
3)准确性
准确性是指在系统达到稳定状态后,系统实际输出量与给定的输出量之间的误差大小,它又称为稳态精度。系统的稳态精度不但与系统有关,而且与输入信号的类型有关。
1. 数学模型
为了实现某种目的而把客观存在的物体按一定关系联系在一起的集合称为物理系统,而工程系统(包括机械系统、电系统、液压系统以及它们的综合系统,即机电一体化系统)是物理系统的-个分支。所示为系统数学模型的形成和分类。

系统的微分方程是在时域中描述系统(或元件)动态特性的数学模型。利用它还可得到描述系统(或元件)动态特性的其他形式的数学模型。
当系统的数学模型能用线性微分方程描述时,该系统称为线性系统。如果微分方程的系数为常数,则称该系统为线性定常系统。线性系统可以运用叠加原理,叠加原理包括叠加性及齐次性。当有几个输入量同时作用于系统时,可以逐个输入,求出对应的输出,然后把各个输出进行叠加,即得系统的总输出。研究非线性系统不能应用叠加原理。不能用线性微分方程描述为非线性系统。一般的非线性系统可以通过线性化转化为线性系统。
1,1描述系统运动的数学模型
Ø输入-输出描述
微分方程是这种描述的最基本形式。传递函数、方框图等其它模型均由它而导出
Ø状态变量描述
状态方程是这种描述的最基本形式。
1.2 建立系统数学模型的方法
Ø 实验法
Ø 解析法
1.3 用解析法建立系统微分方程的一般步骤






2. 传递函数
2.1 传递函数的定义
在零初始条件下,系统(或元件)输出量的拉氏变换与其输入量的拉氏变换之比,即为系统(或元件)的传递函数。
设线性定系统的微分方程式为

在零初始条件下,对上式进行拉式变换得

![]()
- 传递函数是由系统的微分方程经拉氏变换后求得,而拉氏变换是一种线性变换,因而这必然同微分方程一样能象征系统的固有特性,即成为描述系统运动的又一形式的数学模型。
- 由于传递函数包含了微分方程式的所有系数,因而根据微分方程就能直接写出对应的传递函数,即把微分算子 用复变量s表示,把c(t) 和r(t)换为相应的象函数C(s)和R(s),则就把微分方程转换为相应的传递函数。反之亦然。
2.2 传递函数的性质
对于多输入—多输出的系统,要用传递函数矩阵去表征系统的输入与输出的关系,例如对于图3-14所示的系统。

六种典型环节的传递函数


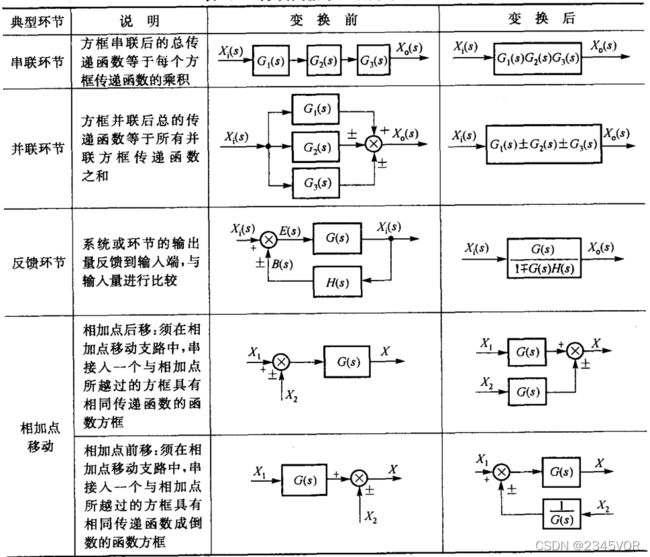
2.3方框图
系统方框图具体而形象地表示了系统内部各环节的数学模型,各变量之间的相互关系以及信号流向。它是系统数学模型的--种图解表示方法。它提供了关于系统动态性能的有关信息,并且可以提示和评价每个组成环节对系统的影响。
- 画方框图规则


- 方框图的简化,关键是解除交叉结构,形成无交叉的多回路结构。

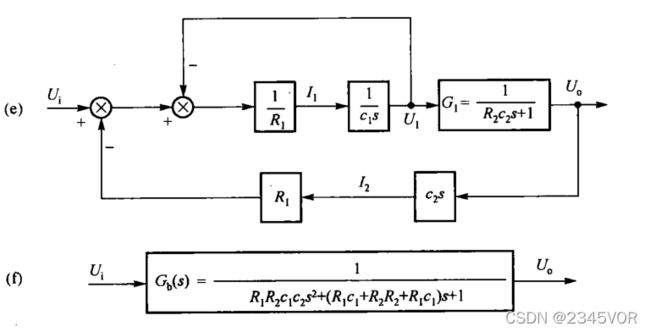
例子

2.4 系统信号流图和梅逊公式
信号流图组成元素和性质。
- 节点:符号“O”,表示系统中的变量,等于所有流人该节点信号之和。其中输入节点称为源节点;输出节点称为汇节点。
- 混合节点:既有输入又有输出的节点称为混合节点。
- 支路:信号在支路上按箭头的指向由一个节点流向另一个节点。
- 传输:通常在支路上编码前后变量之间的关系(在控制系统中就是传递函数)。通路:沿支路箭头方向穿过各相连支路的路径称为通路。
- 回路:起点与终点重合且与任何节点相交不多于一次的通路称为回路。
- 前向通道:从输入节点到输出节点的通路上,通过任何节点不多于一次,则称该通路为前向通路。
- 不接触回路:没有任何公共节点的回路称为不接触回路。自回路:只与一个节点相交的回路称为自回路。
信号流图的简化规则

梅逊公式


3. 带扰动的反馈控制系统
控制系统会受到两类外作用信号的影响。
一个闭环控制系统的典型方块可用下图表示
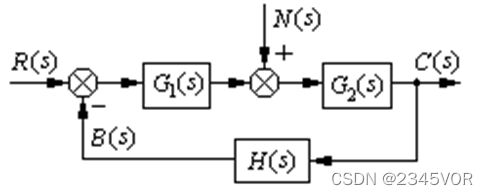
下面介绍几个系统传递函数的概念:
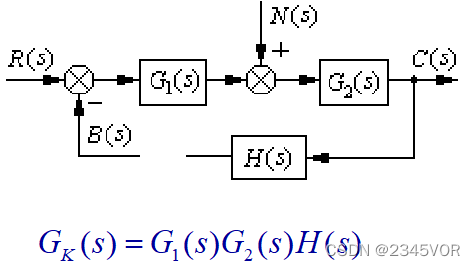
3.1 系统的开环传递函数
前向通路传递函数与反馈通路传递函数的乘积,称为系统的开环传递函数。
开环传递函数是指闭环系统在开环时的传递函数。
3.2 系统的闭环传递函数
r(s)作用下系统的闭环传递函数,令N(s)=0,方块图变为

GB(s)为在输入信号r(t)作用下系统的闭环传递函数。
输出的拉氏变换式:

n(t)作用下系统的闭环传递函数,先求出c(t)对n(t)之间的传递函数。令r(t)=0,

GB(s)为在干扰n(t)作用下系统的闭环传递函数。
而输出的拉氏变换式:

系统的总输出,由线性系统的叠加原理,系统的总输出为各外作用引起的输出的总和,即:

4. 闭环系统的误差传递函数
在典型方块图中,代表被控量c(t)的测量装置的输出b(t)和给定输入r(t)之差为系统的误差e(t),即:

E(s)即图中综合点的输出量的拉氏变换式。



5. 总结
本文学习了控制系统的数学模型——传递函数。后期会分享更多有趣的操作从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。
参考资料:机械工程控制基础学习辅导与习题解答(罗忠、王菲、柳洪义编)