stm32下IIC读取温湿度传感器数据
文章目录
- 前言
- 一、什么是IIC
-
- 1.IIC简介
- 2.IIC协议层
- 3.IIC物理层
- 4.软件IIC&硬件IIC
- 二、工程创建及程序实现
-
- 1.软件模拟IIC代码
- 2.温湿度传感器读取
- 3.主函数调用读取温湿度
- 三、烧板效果展示
- 总结
前言
学习单片机肯定离不开传感器的学习,当掌握了单片机的相关知识之后,我们要学会用单片机去驱动传感器,并且从传感器那里正确的读回我们想要的数据。我们要学会写传感器的接口函数,并且学会阅读芯片的数据手册,这都是我们所必须学的,并且要学回通过阅读芯片的数据手册能够驱动一款芯片。这是我们所需要掌握的基本技能,接下来主要对
AHT20这款温湿度传感器的驱动的学习。并且根据手册正确读回数据。
一、什么是IIC
1.IIC简介
IIC(inter-integrated Circuit集成电路总线)总线支持设备之间的短距离通信,用于处理器和一些外围设备之间的接口,它需要两根信号线来完成信息交换。IIC的一个特殊工艺优势是微控制器只需要两个通用I/O引脚和软件即可控制芯片网络。IIC最早是飞利浦在1982年开发设计并用于自己的芯片上,一开始只允许100Khz、7-bit标准地址,1992年,IIC的第一个公共规范发行,增加了400Khz的快速模式以及10bit地址扩展。
I2C通讯协议(Inter-Integrated Circuit)引脚少,硬件实现简单,可扩展性强,不需要USART、CAN等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。- 实现I2C需要两根信号线完成信息交换,
SCL时钟信号线,SDA数据输入/输出线。它属于同步通信,由于输入输出数据均使用一根线,因此通信方向为半双工。 - I2C最少只需要两根线,和异步串口类似,但可以支持
多个slave设备。一个I2C理论上最多可挂载127个设备,但除去保留地址,最多可挂载112个设备。 - 和SPI不同的是,I2C可以支持multi-master系统,允许有
多个master并且每个master都可以与所有的slaves通信(master之间不可通过I2C通信,并且每个master只能轮流使用I2C总线)。 - 使用I2C传输数据会有一些额外消耗:每发送8bits数据,就需要额外1bit的元数据(ACK或NACK)。
- I2C支持双向数据交换,由于仅有一根数据线,故通信是半双工的。硬件复杂度也位于串口和SPI之间,而软件实现可以相当简单。
- I2C的数据传输速率位于串口和SPI之间,大部分I2C设备支持
100KHz和400KHz模式。
2.IIC协议层
起始信号:当SCL线是高电平时,SDA线从高电平向低电平切换

停止信号:当 SCL 是高电平时,SDA 线由低电平向高电平切换。
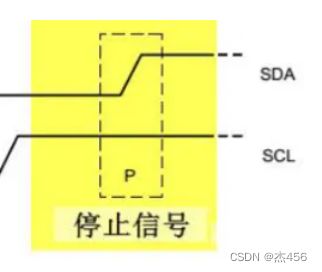
- I2C使用
SDA信号线来传输数据,使用SCL信号线进行数据同步。SDA数据线在SCL的每个时钟周期传输一位数据。传输时,SCL为高电平的时候SDA表示的数据有效,即此时的SDA为高电平时表示数据“1”,为低电平时表示数据“0”。当SCL为低电平时,SDA的数据无效,一般在这个时候SDA进行电平切换,为下一次表示数据做好准备。 应答信号:应答信号为低电平时,规定为有效应答(ACK,简称应答位),表示接收器已经成功地接受了该字节。

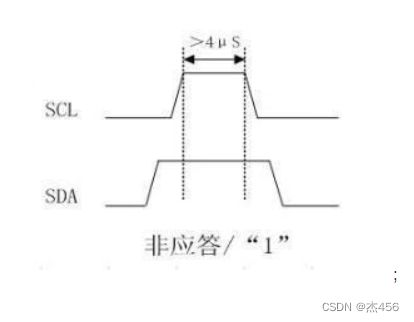
非应答信号:应答位为高电平时,规定为非应答信号(NACK),一般表示接收器接收该字节没有成功。
帧地址:I2C总线上的每个设备都有自己的独立地址,主机发起通讯时,通过SDA信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C协议规定设备地址可以是7位或10位,实际中7位的地址应用比较广泛。- 作为数据接收端时,当设备(无论主从机)接收到I2C传输的一个字节数据或地址后,若希望对方继续发送数据,则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
3.IIC物理层
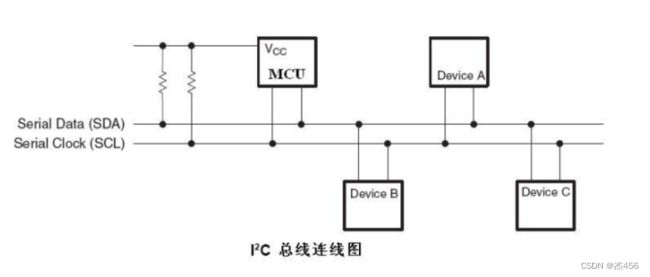
- 它是一个支持设备的总线。“总线”指
多个设备共用的信号线。在一个I2C通讯总线中,可连接多个I2C通讯设备,支持多个通讯主机及多个通讯从机。 - 一个I2C总线只使用两条总线线路,一条
双向串行数据线(SDA),一条串行时钟线(SCL)。数据线即用来表示数据,时钟线用于数据收发同步。 - 每个连接到总线的设备都有一个
独立的地址,主机可以利用这个地址进行不同设备之间的访问。 - 总线通过上拉电阻接到电源。当I2C设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
- 多个主机同时使用总线时,为了防止数据冲突,会利用
仲裁方式决定由哪个设备占用总线。
4.软件IIC&硬件IIC
- 软件模拟IIC一般都是用两个
GPIO管脚来模拟IIC协议的时序,通过控制两个管脚的高低电平状态来模拟出IIC的通信波形。十分的方便,任意两个GPIO管脚就能够实现。- 硬件IIC的话就是单片机上有对应的IIC外设和IIC的驱动电路。硬件IIC相对于软件模拟IIC就有个很不方便的地方,软件模拟IIC随意选两个引脚都可以实现,但是硬件IIC就不行,其管脚已经固定,不能更改。
- 硬件IIC的效率和速度是要比软件IIC要高的,且软件模拟IIC的代码量明显要比硬件IIC多得多,但胜在软件模拟的方便灵活。
- 在有些单片机是没有硬件IIC的功能的,像51单片机就没有硬件IIC功能,且在有些单片机上硬件IIC会不太稳定,会给调试、开发过程带来许多困扰。
二、工程创建及程序实现
1.软件模拟IIC代码
#include "I2C.h"
#include "Delay.h"
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7);
}
void I2C_Start(void)
{
SDA_OUT();//SDA设置为输出
I2C_SDA = 1;
I2C_SCL = 1;
Delay_us(5);
I2C_SDA = 0;//当SCL为高时,SDA由高变低
Delay_us(5);
I2C_SCL = 0;//开始发送或者接收数据
}
void I2C_Stop(void)
{
SDA_OUT();
I2C_SCL = 0;
I2C_SDA = 0;
Delay_us(5);
I2C_SCL = 1;//当CLK为高时,SDA由低变高
Delay_us(5);
I2C_SDA = 1;//发送i2c总线结束信号
}
//产生ACK应答
void I2C_ACK(void)
{
I2C_SCL = 0;
SDA_OUT();
I2C_SDA = 0;
Delay_us(2);
I2C_SCL = 1;
Delay_us(2);
I2C_SCL = 0;
}
void I2C_NACK(void)
{
I2C_SCL = 0;
SDA_OUT();
I2C_SDA = 1;
Delay_us(2);
I2C_SCL = 1;
Delay_us(2);
I2C_SCL = 0;
}
uint8_t I2C_Wait_ACK(void)
{
uint8_t UcErrTime = 0;
SDA_IN();
I2C_SDA = 1;
Delay_us(1);
I2C_SCL = 1;
Delay_us(1);
while(I2C_READ_SDA)
{
UcErrTime++;
if(UcErrTime>250)
{
I2C_Stop();
return 1;
}
}
I2C_SCL = 0;
return 0;
}
//I2C发送一个字节
void I2C_Send_Byte(uint8_t data)
{
uint8_t t;
SDA_OUT();
I2C_SCL = 0;//
for(t = 0;t < 8; t++)
{
I2C_SDA = (data&0x80)>>7;
data <<= 1;
Delay_us(2);
I2C_SCL = 1;
Delay_us(2);
I2C_SCL = 0;
Delay_us(2);
}
}
//I2C读取一个字节
uint8_t I2C_Read_Byte(uint8_t ack)
{
uint8_t i,Receive = 0;
SDA_IN();
for(i = 0; i < 8; i++)
{
I2C_SCL = 0;
Delay_us(2);
I2C_SCL = 1;
Receive <<= 1;
if(I2C_READ_SDA) Receive++;
Delay_us(1);
}
if(!ack) I2C_NACK();
else I2C_ACK();
return Receive;
}
2.温湿度传感器读取
#include "AHT20.h"
//读AHT20的状态字
static uint8_t AHT20_ReadStatusCmd(void)
{
uint8_t tmp[1];
Soft_I2C_Read(AHT20_SLAVE_ADDRESS,AHT20_STATUS_REG,1,tmp);
return tmp[0];
}
//读AHT20标准使能位
static uint8_t AHT20_ReadCalEnableCmd(void)
{
uint8_t tmp;
tmp = AHT20_ReadStatusCmd();
return (tmp>>3)&0x01;
}
//读取AHT20 忙标志位
static uint8_t AHT20_ReadBusyCmd(void)
{
uint8_t tmp;
tmp = AHT20_ReadStatusCmd();
return (tmp>>7)&0x01;
}
//AHT20芯片初始化函数
static void AHT20_IcInitCmd(void)
{
uint8_t tmp[2];
tmp[0] = 0x08;
tmp[1] = 0x00;
Soft_I2C_Write(AHT20_SLAVE_ADDRESS, AHT20_INIT_REG, 2, tmp);
}
//触发AHT20测量
static void AHT20_TrigMeasureCmd(void)
{
uint8_t tmp[2];
tmp[0] = 0x33;
tmp[1] = 0x00;
Soft_I2C_Write(AHT20_SLAVE_ADDRESS, AHT20_Measure, 2, tmp);
}
//AHT20软复位函数
static void AHT20_SoftResetCmd(void)
{
uint8_t tmp[1];
Soft_I2C_Write(AHT20_SLAVE_ADDRESS, AHT20_Reset, 0, tmp);
}
//AHT20 设备初始化
uint8_t AHT20_Init(void)
{
uint8_t rcnt = 2+1;//软复位命令 重试次数,2次
uint8_t icnt = 2+1;//初始化命令 重试次数,2次
while(--rcnt)
{
icnt = 2+1;
Delay_ms(40);//上电后要等待40ms
// 读取温湿度之前,首先检查[校准使能位]是否为1
while((!AHT20_ReadCalEnableCmd()) && (--icnt))// 2次重试机会
{
Delay_ms(10);
// 如果不为1,要发送初始化命令
AHT20_IcInitCmd();
Delay_ms(200);//这个时间不确定,手册没讲
}
if(icnt)//[校准使能位]为1,校准正常
{
break;//退出rcnt循环
}
else//[校准使能位]为0,校准错误
{
AHT20_SoftResetCmd();//软复位AHT20器件,重试
Delay_ms(200);//这个时间不确定,手册没讲
}
}
if(rcnt)
{
Delay_ms(200);//这个时间不确定,手册没讲
return 0;// AHT20设备初始化正常
}
else
{
return 1;// AHT20设备初始化失败
}
}
//读取AHT20的数据
uint8_t AHT20_ReadHT(uint32_t *HT)
{
uint8_t cnt=3+1;//忙标志 重试次数,3次
uint8_t tmp[6];
uint32_t RetuData = 0;
// 发送触发测量命令
AHT20_TrigMeasureCmd();
do{
Delay_ms(75);//等待75ms待测量完成,忙标志Bit7为0
}while(AHT20_ReadBusyCmd() && (--cnt));//重试3次
if(cnt)//设备闲,可以读温湿度数据
{
Delay_ms(5);
// 读温湿度数据
Soft_I2C_Read(AHT20_SLAVE_ADDRESS, AHT20_STATUS_REG, 6, tmp);
// 计算相对湿度RH。原始值,未计算为标准单位%。
RetuData = 0;
RetuData = (RetuData|tmp[1]) << 8;
RetuData = (RetuData|tmp[2]) << 8;
RetuData = (RetuData|tmp[3]);
RetuData = RetuData >> 4;
HT[0] = RetuData;
// 计算温度T。原始值,未计算为标准单位°C。
RetuData = 0;
RetuData = (RetuData|tmp[3]) << 8;
RetuData = (RetuData|tmp[4]) << 8;
RetuData = (RetuData|tmp[5]);
RetuData = RetuData&0xfffff;
HT[1] = RetuData;
return 0;
}
else//设备忙,返回读取失败
{
return 1;
}
}
//原始数据转换函数
uint8_t StandardUnitCon(struct AHT20_INF* aht)
{
aht->rh = (double)aht->ht[0] *100 / 1048576;//2^20=1048576 //原式:(double)aht->HT[0] / 1048576 *100,为了浮点精度改为现在的
aht->te = (double)aht->ht[1] *200 / 1048576 -50;
//限幅,RH=0~100%; Temp=-40~85°C
if((aht->rh >=0)&&(aht->rh <=100) && (aht->te >=-40)&&(aht->te <=85))
{
aht->flag = 0;
return 0;//测量数据正常
}
else
{
aht->flag = 1;
return 1;//测量数据超出范围,错误
}
}
uint8_t Soft_I2C_Write(uint8_t addr,uint8_t reg_addr,uint8_t len,uint8_t *data_buf)
{
uint8_t i;
I2C_Start();
I2C_Send_Byte(addr << 1 | I2C_Direction_Transmitter);//发送器件地址+写命令
if(I2C_Wait_ACK())//等待应答
{
I2C_Stop();
return 1;
}
I2C_Send_Byte(reg_addr);//写寄存器地址
I2C_Wait_ACK();//等待应答
for(i=0;i<len;i++)
{
I2C_Send_Byte(data_buf[i]);//发送数据
if(I2C_Wait_ACK())//等待ACK
{
I2C_Stop();
return 1;
}
}
I2C_Stop();
return 0;
}
uint8_t Soft_I2C_Read(uint8_t addr,uint8_t reg_addr,uint8_t len,uint8_t *data_buf)
{
uint8_t result;
I2C_Start();
I2C_Send_Byte(addr << 1 | I2C_Direction_Transmitter);//发送器件地址+写命令
if(I2C_Wait_ACK())//等待应答
{
I2C_Stop();
return 1;
}
I2C_Send_Byte(reg_addr);//写寄存器地址
I2C_Wait_ACK();//等待应答
I2C_Start();
I2C_Send_Byte(addr << 1 | I2C_Direction_Receiver);//发送器件地址+读命令
I2C_Wait_ACK();//等待应答
while(len)
{
if(len==1)*data_buf=I2C_Read_Byte(0);//读数据,发送nACK
else *data_buf=I2C_Read_Byte(1);//读数据,发送ACK
len--;
data_buf++;
}
I2C_Stop();//产生一个停止条件
return 0;
}
3.主函数调用读取温湿度
IIC_Init();
Delay_Init();
My_Uart_Init(115200);
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOC,&GPIO_InitStructure);
GPIO_ResetBits(GPIOC,GPIO_Pin_13);
AHT20.alive = !AHT20_Init();
while(1)
{
if(AHT20.alive)
{
AHT20.flag = AHT20_ReadHT(AHT20.ht);
StandardUnitCon(&AHT20);
}
printf("温度:%.2f°c 湿度:%.2f%%\n",AHT20.te,AHT20.rh);
Delay_ms(1000);
}
三、烧板效果展示
可以看到,程序运行很成功,成功读取到了温湿度信息,已基本掌握写外设传感器的接口函数的方法。
总结
在学习过程中,我也有遇到许许多多问题,虽然写温湿度传感器的接口函数相对于来说比较简单,但是如果不细心的话还是会有很多问题。首先,整个工程都是用标库写的,我在写的过程中就不小心开错了时钟,刚开始导致怎么都读不对数据,后面经过仔细检查才发现,调用时钟开启函数时候打错一个数字,刚好它的固件库也有这个函数,编译不报错,这里浪费了很多时间,还有就是这个温湿度传感器虽然数据手册上写供电2.8~5v都可以,并且建议是3.3v,但是不知道为什么我3.3v就读不出来,当我接5v的时候就正常。