ros2-foxy windows下安装流程
1.系统要求
本手册安装环境为win10 x64
请确保已在系统路径中安装PowerShell。
请确保网络的通畅性
2.环境安装部分
安装Chocolatey
方案1:
复制以下命令行,使用管理员权限打开PowerShell,复制粘贴大法到PowerShell,安装好choco:
@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin"
安装完成后,输入choco应出现提示信息,如下图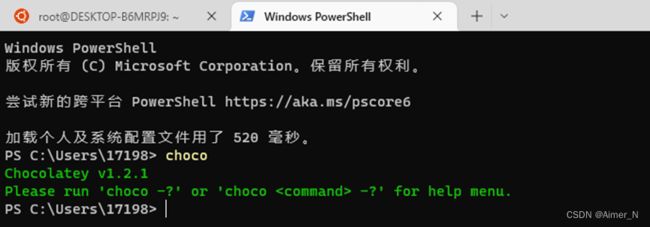
方案2
windows下有个脚本运行框,powershell,已管理员的身份运行,然后执行如下
第一步
Get-ExecutionPolicy
如果返回Restricted,则执行这一步
Set-ExecutionPolicy Bypass -Scope Process
第二步
Set-ExecutionPolicy Bypass -Scope Process -Force; [System.Net.ServicePointManager]::SecurityProtocol = [System.Net.ServicePointManager]::SecurityProtocol -bor 3072; iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))
至此应该安装完成了,可以通过下面的方式查看
choco –version
安装ros2
C盘需要5G的空间
在PowerShell中执行以下命令:(当前段落所执行的命令均可能导致较长的耗时,请耐心等待)
mkdir c:\opt\chocolatey
set PYTHONNOUSERSITE=1
set ChocolateyInstall=c:\opt\chocolatey
choco source add -n=ros-win -s="https://aka.ms/ros/public" --priority=1
执行完毕后输入:
choco upgrade ros-foxy-desktop -y --execution-timeout=0
带命令执行完毕后,以管理员权限打开cmd,运行:
call C:\opt\ros\foxy\x64\local_setup.bat
ros2 run turtlesim turtlesim_node
此时,应出现一个乌龟模拟器,此程序为ros2自带的测试程序,效果如图:
另起一个cmd,扔选择管理员权限开启,执行:
call C:\opt\ros\foxy\x64\local_setup.bat
ros2 run turtlesim turtle_teleop_key
即可对之前运行的乌龟模拟器进行控制,至此,ros2安装完成
配置powershell环境以自动载入ros2配置文件
在C:\Users\<当前用户>\Documents\WindowsPowerShell路径下新建文件Microsoft.PowerShell_profile.ps1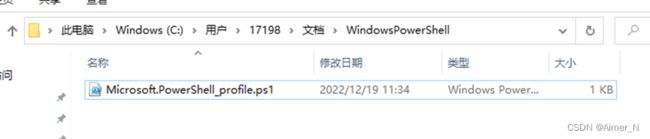
用记事本等软件打开文件,将如下内容填入文件中:
C:\opt\ros\foxy\x64\local_setup.ps1
Unblock-File C:\opt\ros\foxy\x64\local_setup.ps1
保存文件
直接打开powershell后,输入ros2出现
则配置成功
如果不进行该项配置,之后每次运行cmd等terminal时,先行载入ros2配置文件(默认路径为C:\opt\ros\foxy\x64\local_setup.bat),以下文档默认执行过该命令,不另作说明,当发现输入ros2相关指令无反应时请自行检查
如果出现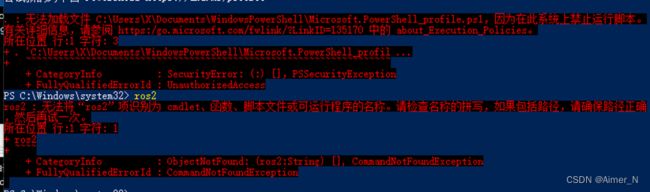
解决方法:
1、打开PowerShell(管理员)
2、set-ExecutionPolicy RemoteSigned //设置为打开
3、键入Y或者A,同意
4、执行get-executionpolicy查看是否更改成功,为RemoteSigned表示成功
3. 基于ROS2创建官方demo
创建基本文件
建议新建文件夹,用以编写和试运行demo
打开PowerShell,且进入当前路径
运行命令:
ros2 pkg create --build-type ament_cmake --node-name my_node mypackage
执行完成后
当前路径下应出现mypackage文件夹,进入该文件夹应已自动创建如下文件

编译运行
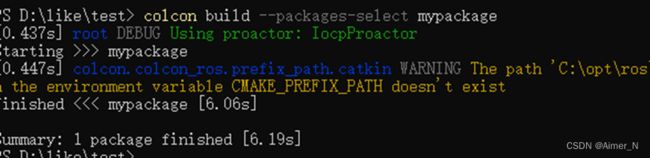
cd到上级目录,执行:
colcon build --packages-select mypackage
关于colcon的相关参数选择,可以点击此处查阅官方相关文档
执行完毕后,运行命令:.\install\setup.ps1来source刚刚编译好的package

运行命令ros2 run mypackage my_node,可以看到输出结果为hello world mypackage package。
至此,官方的创建ros2包的demo程序成功完成。
4. 基于ROS2编写发布订阅demo
创建源文件并填写
选定工作目录后,新建文件夹src并进入,然后我们创建一个包
ros2 pkg create --build-type ament_cmake cpp_pubsub
终端会显示创建了一些文件和目录表示创建成功。
然后我们进入到包的src文件夹下
在当前目录下(src上级),按照前一步的方法使ros2自动创建工作环境并执行colcon build ,包名定位
新建文件publisher_member_function.cpp,内容如下:
- #include
- #include
- #include "rclcpp/rclcpp.hpp"
- #include "std_msgs/msg/string.hpp"
- using namespace std::chrono_literals;
- /* This example creates a subclass of Node and uses std::bind() to register a
- * member function as a callback from the timer. */
- class MinimalPublisher : public rclcpp::Node
- {
- public:
- MinimalPublisher()
- : Node("minimal_publisher"), count_(0)
- {
- publisher_ = this->create_publisher
- timer_ = this->create_wall_timer(
- 500ms, std::bind(&MinimalPublisher::timer_callback, this));
- }
- private:
- void timer_callback()
- {
- auto message = std_msgs::msg::String();
- message.data = "Hello, world! " + std::to_string(count_++);
- RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
- publisher_->publish(message);
- }
- rclcpp::TimerBase::SharedPtr timer_;
- rclcpp::Publisher
- size_t count_;
- };
- int main(int argc, char * argv[])
- {
- rclcpp::init(argc, argv);
- rclcpp::spin(std::make_shared
()); - rclcpp::shutdown();
- return 0;
- }
新建文件subscriber_member_function.cpp,内容如下:
- #include
- #include "rclcpp/rclcpp.hpp"
- #include "std_msgs/msg/string.hpp"
- using std::placeholders::_1;
- class MinimalSubscriber : public rclcpp::Node
- {
- public:
- MinimalSubscriber()
- : Node("minimal_subscriber")
- {
- subscription_ = this->create_subscription
- "topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
- }
- private:
- void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
- {
- RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
- }
- rclcpp::Subscription
- };
- int main(int argc, char * argv[])
- {
- rclcpp::init(argc, argv);
- rclcpp::spin(std::make_shared
()); - rclcpp::shutdown();
- return 0;
- }
Package.xml
之后修改package.xml文件
在ament_cmake描述的编译依赖过后之后粘贴下面两行
修改后应为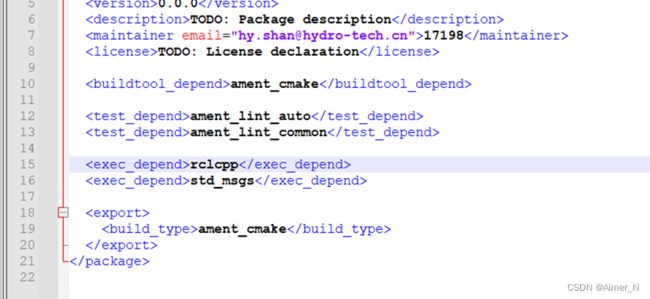
CMakeLists.txt
之后修改CMakeLists.txt文件。在已有的依赖find_package(ament_cmake REQUIRED)下面添加新的两行
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
然后我们添加一个talker的可执行文件,以便ros2 run可以运行这个文件
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
后我们还需要添加install(TARGETS…)部分以便于ros2 run可以找到这个可执行文件:
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
在install部分talker下面添加listener
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
至此CMakeLists.txt和package.xml文件修改完毕,完全修改的CMakeLists.txt文件内容应如下:
- cmake_minimum_required(VERSION 3.5)
- project(cpp_pubsub)
- # Default to C++14
- if(NOT CMAKE_CXX_STANDARD)
- set(CMAKE_CXX_STANDARD 14)
- endif()
- if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
- add_compile_options(-Wall -Wextra -Wpedantic)
- endif()
- find_package(ament_cmake REQUIRED)
- find_package(rclcpp REQUIRED)
- find_package(std_msgs REQUIRED)
- add_executable(talker src/publisher_member_function.cpp)
- ament_target_dependencies(talker rclcpp std_msgs)
- add_executable(listener src/subscriber_member_function.cpp)
- ament_target_dependencies(listener rclcpp std_msgs)
- install(TARGETS
- talker
- listener
- DESTINATION lib/${PROJECT_NAME})
- ament_package()
编译运行
之后请确保使用管理员权限运行Developer PowerShell for VS 2019(使用其他terminal可能会导致colcon build编译失败问题,也可通过cmake自行编译),在example所在目录,执行:
colcon build --packages-select example
运行结果如图:
出现finished字样则表明构建成功
之后按照之前的demo流程,在powershell中执行
.\install\setup.ps1![]()
之后便可通过ros2 run example listner/talker 运行demo,注意第一次运行时可能会提示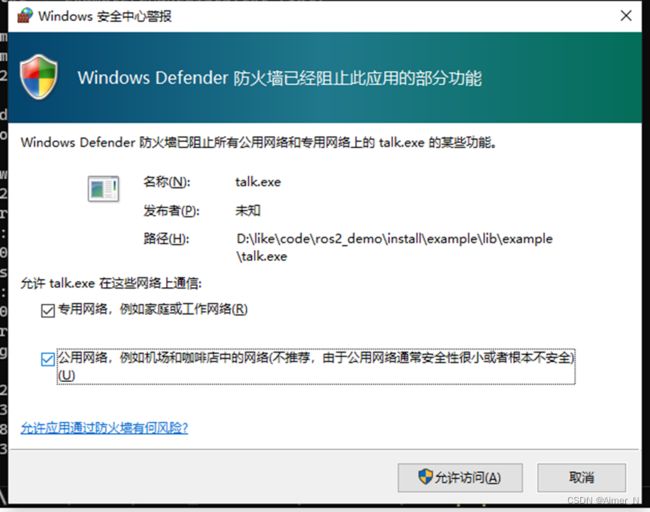
请允许其在公共网络上通信,如发现listener无法正常接收来自talker的信息,可以关闭终端后,重新打开,执行.\install\setup.ps1后重新运行ros2 run example listner/talker即可解决,成功运行结果如图:
