【JUC源码】JUC核心:AQS(二)同步队列源码分析(独占锁)
AQS 系列:
- 【JUC源码】JUC核心:AQS(一)底层结构分析
- 【JUC源码】JUC核心:AQS(二)同步队列源码分析(独占锁)
- 【JUC源码】JUC核心:AQS(三)同步队列源码分析(共享锁)
- 【JUC源码】JUC核心:AQS(四)条件队列源码分析
- 【JUC源码】JUC核心:关于AQS的几个问题
同步队列:
- 作用:管理多个线程的休眠与唤醒
- 策略:可以执行的线程 = RUNNABLE 状态 && tryAcquire() 成功
- 独占模式(EXCLUSIVE):队首持锁,唤醒队二后 tryAcquire() 尝试拿锁,队三及以后休眠
- 共享模式(SHARED):相较于独占模式只唤醒队二 ,共享模式还唤醒所有 mode=shared 节点(多了一步)
注:这里需要明确一点,独占和共享是对于加锁而言(能否多线程同时获锁),释放锁时没有独占和共享的概念
- 状态
- 初始化(0):入队的初始状态
- SIGINAL(-1):若当前 node 后面还有 node,就要从 0->SIGNAL
- CANCELLED(1):拿锁失败或出现异常,会在置为 CANCELLED 后删除,但并发时可能会暂时维持
1.独占-加锁
acquire()
该方法用作获取锁。排他模式下,acquire 方法由子类的 lock 方法直接调用。如下图是 Reentrantlock 的静态内部类 Sync 和 NonfairSync:
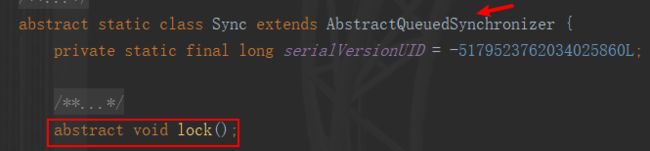
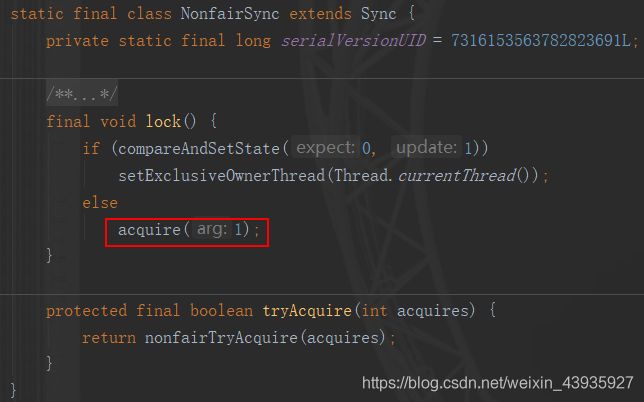
注:从图中也可以看出 NonfairSync 的 lock 方法是非公平的,因为当前线程直接就有获取锁的机会(CAS修改state成功),不是必须要进入同步队列,接受同步器的调度。
- 尝试获得锁,成功直接放回
- 失败,加入同步队列,等待拿锁
public final void acquire(int arg) {
// tryAcquire 方法是需要子类去实现的
// CAS修改state判断能否拿到锁,拿到锁return true,不会再进入addWaiter
if (!tryAcquire(arg) &&
// addWaiter 入参代表是排他模式
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
PS:这里一定要明白,AQS 中并没有实现 tryAcquire() 方法,它是交由子类去实现的,因为它是使用 AQS 加锁的关键。
如下图,是 Reentrantlock中 NonfairSync 的 tryAcquire 方法的具体实现

// Reentrantlock.sync#nonfairTryAcquire()
final boolean nonfairTryAcquire(int acquires) {
// 获取当前线程
final Thread current = Thread.currentThread();
// 获取当前同步器的状态
int c = getState();
// 若c=0,表示没有线程持锁,即有机会获取锁
if (c == 0) {
// 尝试将state通过CAS设置为1
if (compareAndSetState(0, acquires)) {
// 若CAS成功,表示当前线程可以拿锁,则将拿锁线程设为当前
setExclusiveOwnerThread(current);
return true; // 返回true
}
}
// 如果当前线程已经获得锁了
else if (current == getExclusiveOwnerThread()) {
// 重入,+1
int nextc = c + acquires;
if (nextc < 0) // overflow
throw new Error("Maximum lock count exceeded");
setState(nextc);
// 返回true
return true;
}
// 否则,返回false,表示获取不到锁
return false;
}
addWaiter()
回到 acquire() ,可以看到 tryAcquire() 后,就是 addWaiter(),将等待的线程加入同步队列。
PS:这里注意一点,对于同步队列节点的所有操作,都要是线程安全的,即通过 CAS
private Node addWaiter(Node mode) {
// 创建并初始化 Node
Node node = new Node(Thread.currentThread(), mode);
// 在自旋前,先尝试看能否直接加到队尾,若成功直接返回
// 这种做法大部分都可以一次成功,节省了自旋的开销
Node pred = tail;
// 当前同步队列不能为空,因为为空时还要设置head
if (pred != null) {
// 将新节点node的前置节点设置为tail(双向链表)
node.prev = pred;
// 为了保证线程安全,CAS交换尾结点,然后再连接上一个tail
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
// 当直接加入队列失败(即CAS失败或者队列为空),需要通过自旋保证node加入到队尾
enq(node);
return node;
}
enq()
- 线程加入同步队列中方法,追加到队尾
- 这里需要重点注意的是,返回值是添加 node 的前一个节点
private Node enq(final Node node) {
// 自旋,保证在出现竞争时也能安全加入同步队列
for (;;) {
// 得到队尾节点
Node t = tail;
// 如果队尾为空,说明当前同步队列都没有初始化
// tail = head = new Node();
if (t == null) {
// 则新建一个空 node 作为头
if (compareAndSetHead(new Node()))
tail = head;
// 队尾不为空,将当前节点追加到队尾
} else {
node.prev = t;
// node 追加到队尾
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
acquireQueued(核心方法)
管理同步队列(拿锁+休眠)
- 队二尝试拿锁,成功后取代队首
- 同步队列队首是已经获得锁的节点
- 队二有两种情况:1.新node进入直接就是队二 2.队n被唤醒后发现此时他已经前进了到了队二
- 若队二拿锁失败(非公平锁),则(继续)进入休眠;但是它仍是队二,队首也没删
- 阻塞队3-队n
- 前提是自旋使自己前一个节点的状态变成 signal(SIGNAL代表后面一定有待唤醒,不会被遗忘)
- 等线程一个个醒来后,再尝试拿锁
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
// 自旋
for (;;) {
// predecessor是Node中的方法,作用是放回当前节点的上一个节点(prev)
final Node p = node.predecessor();
// 队二是有资格夺锁(tryAcquire)的节点
// 若成功则把自己设置为队首,失败就(再)进入休眠
if (p == head && tryAcquire(arg)) { // 如果当前节点是队二,且可以获取到锁
// 将当前node置为head,实际上就是删除已经释放锁的节点
setHead(node);
// p(之前获得锁的节点)被回收,next置为null是为了help gc
p.next = null;
failed = false;
return interrupted;
}
// shouldParkAfterFailedAcquire 检验node能否休眠(pre=SIGNAL),若不能则设置pre=SIGNAL
// parkAndCheckInterrupt 阻塞当前线程
if (shouldParkAfterFailedAcquire(p, node) &&
// 线程是在这个方法里面阻塞的,醒来的时候仍然在无限 for 循环里面,就能再次自旋尝试获得锁
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
// 如果获得node的锁失败或异常,将 node 置为 CANCELLED,并删除
// 因此,在并发情况下,同步队列中的任何位置节点都可能短暂CANCELLED,但最后一定会被删掉
if (failed)
cancelAcquire(node);
}
}
- setHead()
排他模式下,获得锁的节点,一定会被设置成头节点
private void setHead(Node node) {
// 将head设置为当前ndoe
head = node;
// 将获得锁的线程置null
node.thread = null;
node.prev = null;
}
shouldParkAfterFailedAcquire()
校验能否安全休眠:当前线程可以安心阻塞的标准,就是前一个节点线程状态是 SIGNAL 了
- 前一个结点是SIGNAL,return true
- 前一个节点不是SIGNAL,return false(因为上层调用是自旋,所以最后一定能SIGNAL)
- waitStatus>0(已取消):依次向前寻找,挂到一个未取消节点后面
- waitStatus<=0 但不是SIGNAL,就将前一个结点设为SIGNAL
// 入参 pred 是前一个节点,node 是当前节点。
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
// 如果前一个节点 waitStatus 状态已经是 SIGNAL 了,直接返回,不需要在自旋了
if (ws == Node.SIGNAL)
return true;
// 如果前一个节点状态已经被取消了
if (ws > 0) {
// 找到前一个状态不是取消的节点,因为把当前 node 挂在有效节点身上
// 因为节点状态是取消的话是无效的,是不能作为 node 的前置节点的,所以必须找到 node 的有效节点才行
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
// 否则直接把前一个结点状态置 为SIGNAL
} else {
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
parkAndCheckInterrupt()
通过park休眠当前线程,到时需要unpark唤醒
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}

这里最终调用的 Unsafe 类,是位于sun.misc包下的一个类,可以用来在任意内存地址位置处读写数据,支持一些CAS原子操作。Java 最初被设计为一种安全的受控环境。尽管如此,HotSpot 还是包含了一个后门 sun.misc.Unsafe,提供了一些可以直接操控内存和线程的底层操作。
park 及 unpark 底层其实是调用了操作系统的 Mutex互斥量、Condition 信号量、_counter计数器
- park主要流程:
- 当_counter > 0,则直接调用 pthread_mutex_unlock 解锁并返回;
- 当超时时间 time>0,则调用 pthread_cond_timedwait 进行超时等待,直到超时时间到达;
- 当超时时间 time=0,则调用 pthread_cond_wait 等待;
- 当 wait 返回时设置_counter = 0,并调用 pthread_mutex_unlock 解锁;
- unpark主要流程:
- 调用pthread_mutex_lock获取锁,设置_counter=1,调用pthread_mutex_unlock解锁;
- 若_counter的原值等于0,则调用pthread_cond_signal进行通知处理;
PS:所以,并不是说 AQS 就全部都在用户态完成了,无论是 AQS 还是 synchronized 的阻塞,都需要借助操作系统底层的互斥量、信号量。本质上都是线程的阻塞、唤醒,都会涉及线程状态切换。关于 park 相关源码可以参考这篇文章…
cancelAcquire()
在node获得锁过程中失败或出现异常,就将 node 设为 CANCELLED,然后删除;并发下可能短暂维持
private void cancelAcquire(Node node) {
// 将无效节点过滤
if (node == null)
return;
// 设置该节点不关联任何线程,也就是虚节点
node.thread = null;
Node pred = node.prev;
// 通过前驱节点,跳过取消状态的node
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
// 获取过滤后的前驱节点的后继节点
Node predNext = pred.next;
// 把当前node的状态设置为CANCELLED
node.waitStatus = Node.CANCELLED;
// 如果当前节点是尾节点,将从后往前的第一个非取消状态的节点设置为尾节点
// 更新失败的话,则进入else,如果更新成功,将tail的后继节点设置为null
if (node == tail && compareAndSetTail(node, pred)) {
compareAndSetNext(pred, predNext, null);
} else {
int ws;
// 如果当前节点不是head的后继节点,1:判断当前节点前驱节点的是否为SIGNAL,
// 2:如果不是,则把前驱节点设置为SINGAL看是否成功
// 如果1和2中有一个为true,再判断当前节点的线程是否为null
// 如果上述条件都满足,把当前节点的前驱节点的后继指针指向当前节点的后继节点
if (pred != head &&
((ws = pred.waitStatus) == Node.SIGNAL ||
(ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) {
Node next = node.next;
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
// 如果当前节点是head的后继节点,或者上述条件不满足,那就唤醒当前节点的后继节点
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
2.独占-释放
release()
release() 是 unlock() 的基础方法,用于释放锁。如图是 Reentrantlock 的 unlock 方法,

可以看到,是调用的继承了 AQS 的 Sync 的 release 方法,该方法是在 AQS 中实现的
public final boolean release(int arg) {
// tryRelease 交给子类去实现
// 一般就是用当前同步器状态减去 arg,如果返回 true 说明成功释放锁。
if (tryRelease(arg)) {
// 如果可以释放锁,保存头结点head
Node h = head;
// 头节点不为空,并且非初始化状态
if (h != null && h.waitStatus != 0)
// 唤醒同步队列队二
unparkSuccessor(h);
return true;
}
return false;
}
下面是 ReentrantLock 的 Sync 的 tryRelease 方法,可以看到,核心是将 AQS 状态置为 0
protected final boolean tryRelease(int releases) {
int c = getState() - releases;
if (Thread.currentThread() != getExclusiveOwnerThread())
throw new IllegalMonitorStateException();
boolean free = false;
// 如果state=0了,就是可以释放锁了
if (c == 0) {
free = true;
// 将拿锁线程置为null
setExclusiveOwnerThread(null);
}
// 重置同步器的state
setState(c);
// 返回是否成功释放
return free;
}
unparkSuccessor(核心方法)
找到真正的队二(不是CANCELLED状态),并唤醒
- head.next 非 null 非 CANCELLED,head.next 就是被唤醒对象
- head.next 如果不行,就从同步队列尾找,防止唤醒的 node 的前置节点仍然是 CANCELLED
注:此时并未删除 head
private void unparkSuccessor(Node node) {
// node 节点是当前释放锁的节点,也是同步队列的头节点
int ws = node.waitStatus;
// 如果节点已经被取消了,把节点的状态置为初始化
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
// 拿出队二s
Node s = node.next;
// s 为空,表示 node 的后一个节点为空
// s.waitStatus 大于0,代表 s 节点已经被取消了
// 遇到以上这两种情况,就从队尾开始,向前遍历,找到第一个 waitStatus 字段不是被取消的
if (s == null || s.waitStatus > 0) {
s = null;
// 结束条件是前置节点就是head了
for (Node t = tail; t != null && t != node; t = t.prev)
// t.waitStatus <= 0 说明 t 当前没有被取消,肯定还在等待被唤醒
if (t.waitStatus <= 0)
s = t;
}
// 唤醒以上代码找到的线程
if (s != null)
LockSupport.unpark(s.thread);
}
到这里需要明确一点,在AQS中,若一个线程释放了锁,接下来只会唤醒一个线程,并不是把所有线程都唤醒,然后大家再去竞争。