排序-时间复杂度
技巧:先处理 内层 一次排序,在处理外面
直接插入排序

升序
最坏(遇到降序):O(N^2) 等差数列 1+2+3+…+(n-1) = (n^2-n)/2
最好(有序) O(N)
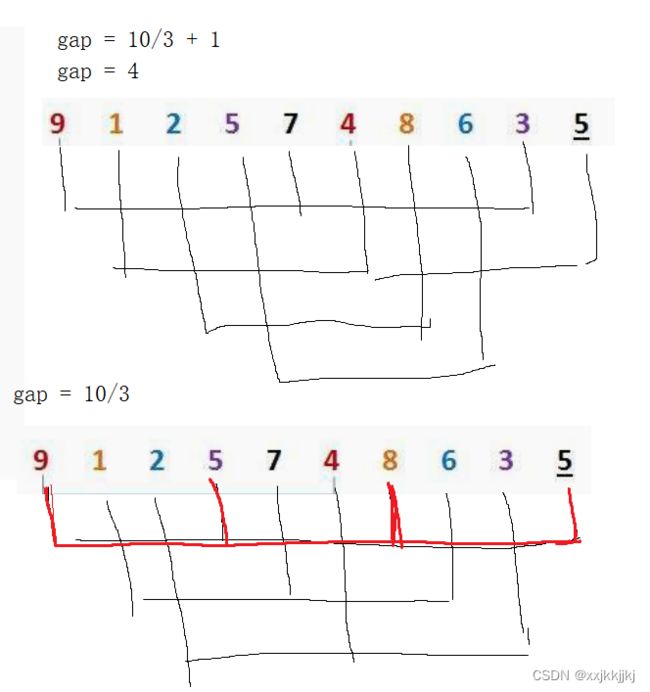
希尔排序
gap 任何数字/2都是=1
gap/3 +1 保证gap最后是1
gap是多少 就分了多少组,每组数据可能少一点,但是肯定能分成gap组,前提是gap
时间复杂度分析

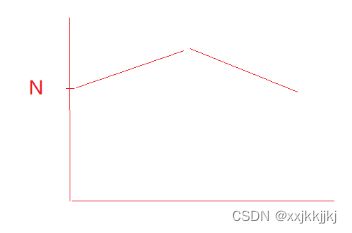
外层while(gap>1)----LogN
里面gap 很大 可以算出精确的2n 认为是N
gap=1 n 认为是N
gap变小过程中 ,N的变化
这里面就无法算出精确的了
结论:N^1.3
//N^1.3
void ShellSort(int* a, int n)
{
//gap>1 预排序
//gap == 1 直接插入排序
int gap = n;
while (gap > 1)
{
//gap /= 2;
gap = gap / 3 + 1;
for (int i = 0; i < n - gap; i++)
{
int end = i;
int tmp = a[end + gap];
while (end >= 0)
{
if (tmp < a[end])
{
a[end + gap] = a[end];
end -= gap;
}
else
{
break;//tmp>a[end] 结束
}
}
a[end + gap] = tmp;
}
//PrintArray(a, n);
}
}
选择排序
最烂的排序
最坏:N^2 N N-2 N-4 … 等差数列
最好:N^2
N-2还是优化后的,遍历一遍可以选出最大最小
不优化每次选出最小,选出一个
//最坏:N^2 N N-2 N-4 ...等差数列
//最好:N^2
void SelectSort(int* a, int n)
{
int left = 0, right = n - 1;
while (left < right)
{
int min = left, max = left;
for (int i = left + 1; i <= right; i++)
{
if (a[i] < a[min])
{
min = i;
}
if (a[i] > a[max])
{
max = i;
}
}
Swap(&a[left], &a[min]);
if (left == max)
{
max = min;
}
Swap(&a[right], &a[max]);
left++;
right--;
}
}
堆排序
O(NlogN)
交换排序
交换排序(冒泡,快排) 是把数据进行交换,也就是Swap() 就像不能直接站到同学的脑袋上去
冒泡排序
如果不加flag优化 时间复杂度 O(N^2) 等差数列 N-1 N-2…1
优化 最好O(N) 最坏O(N^2)
void BubbleSort(int* a, int n)
{
for (int j = 1; j <= n - 1; j++)
{
bool ExChange = false;
for (int i = 0; i < n - j; i++)
{
if (a[i + 1] < a[i])
{
Swap(&a[i + 1], &a[i]);
ExChange = true;
}
}
if (ExChange == 0)
{
break;
}
}
}
快速排序-递归
快排的递归是一种先序
- hoare版本

快速排序单趟干了两件事
选出一个关键值/基准值key,把他放到正确的位置(最终排好序要蹲的位置)
左边的都比key小,右边的都比key大
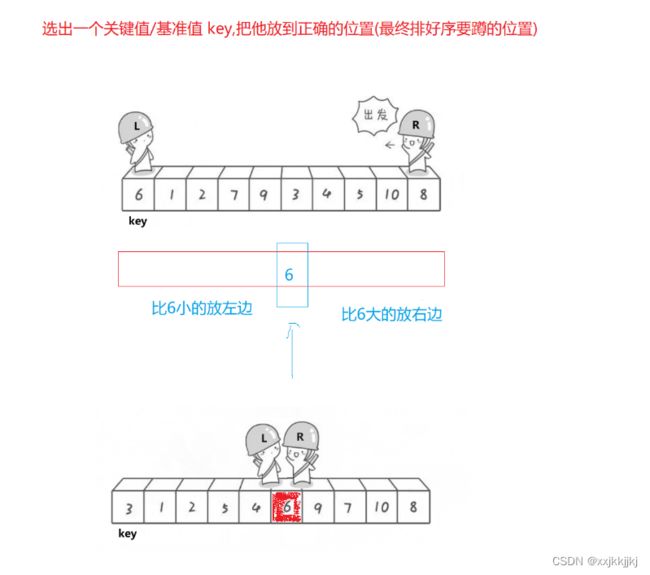
key一般选最左或者最右
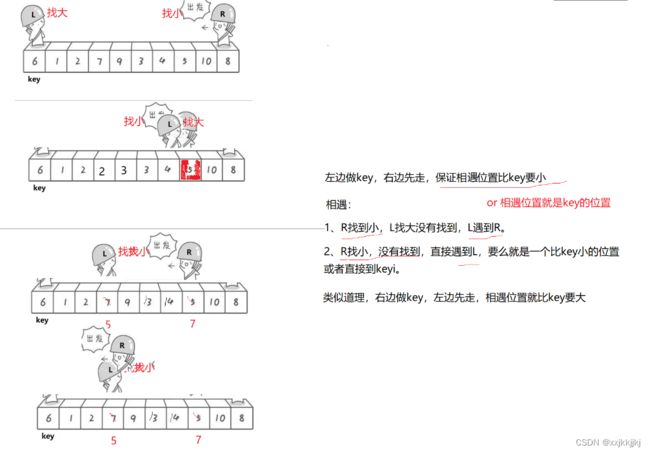
左边做Key 右边先走找小 左边后走找大,LR都找到就交换,直到LR相遇位置就是key应该排在的位置,把key和LR相遇位置交换,完成单趟排
为什么要右边先走找小,左边再走找大呢?
结论就是这样才能保证他们相遇时位置的值比Key小,或者就是key的位置
关键是发生交换后把小的换到左边
我们分类处理
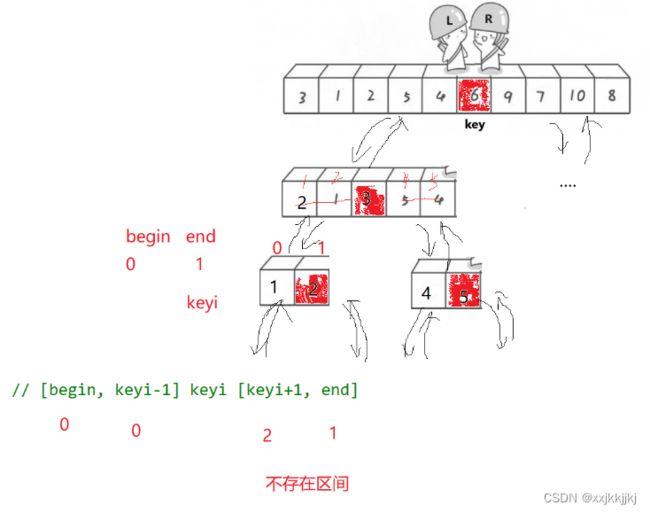
LR相遇后找到keyi应该排在的位置,根据keyi下标分出2个区间,继续递归下去,如果够均匀就是满二叉树了,思想也是二叉树前序递归的思想
[begin, keyi - 1] keyi [keyi+1, end]
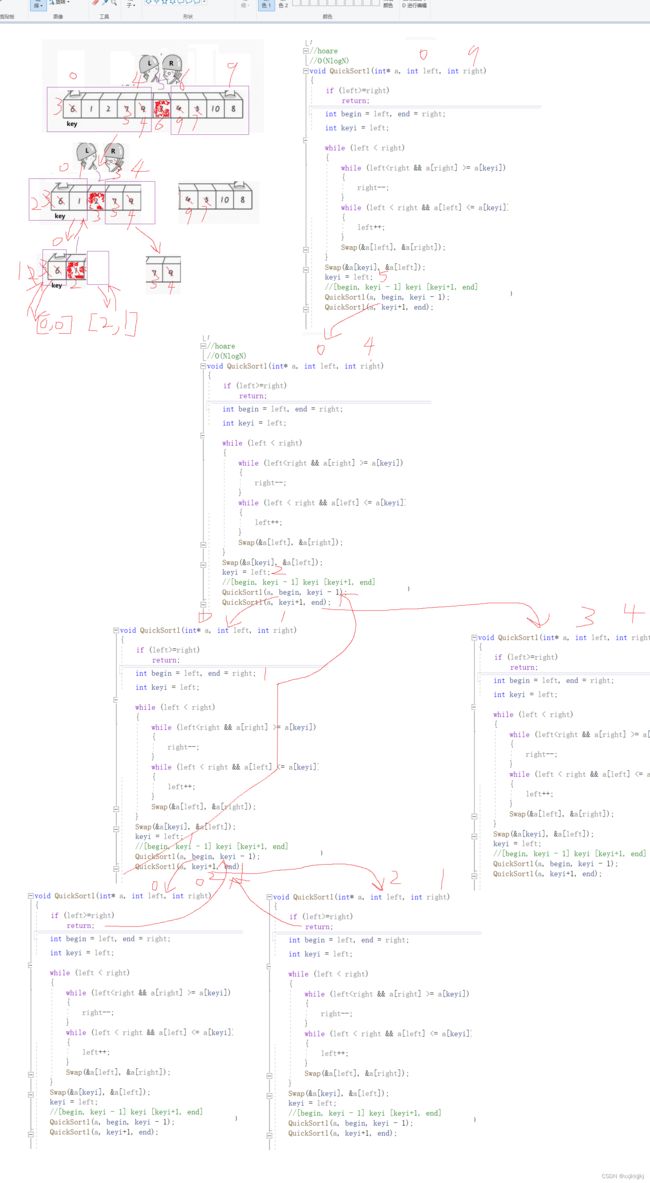
递归返回条件是选出keyi 分出的区间只有一个值或不存在的区间
时间复杂度
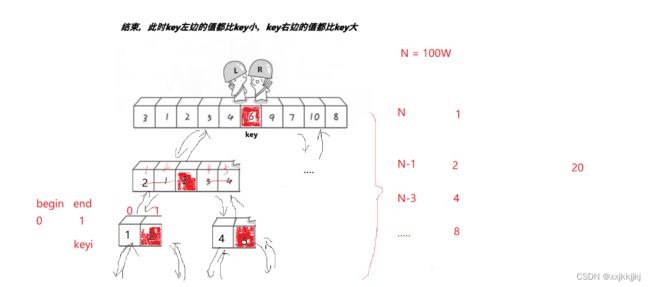
如果能均分 就是满二叉树 高度次logN*单趟每次如图所示
二叉树最后一层占了总二叉树一半的节点数
假设N=100W就有20层
排到最后一层时,之前一半数量的节点都排好了,相当于最后一层 单趟N-50w 还是100W的量级

每层N-1 N-3 …减到最后一层N-50W 还是N的量级 所以说减不了多少,一共logN层 每层认为还是N
那就是O(NlogN)
数据有序时间复杂度反而最坏
最坏的情况 有序 反而变坏了 时间复杂度 N^2 等差数列
此时空间复杂度 是 O(N) 开辟了N个栈帧,平时空间复杂度是高度次O(logN)的栈帧(空间复用)
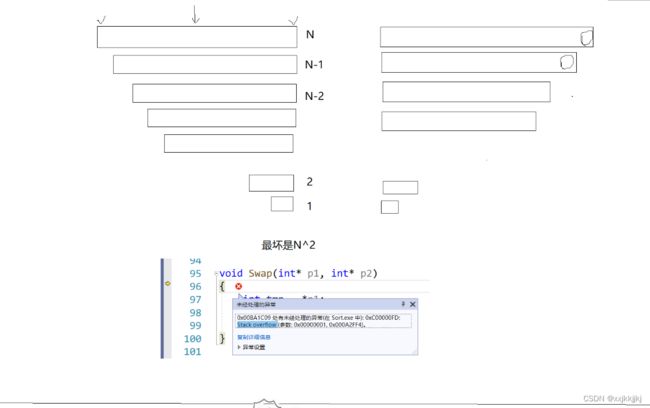
左边做key 123… 右边找不到比key小 R一直往左走
右边做key 7 6 5 … 1 左边找大 右边找小 R一直往左走
//hoare
//O(NlogN)
void QuickSort1(int* a, int left, int right)
{
if (left>=right)
return;
int begin = left, end = right;
//随机选key
//int randi = left + (rand() % (right - left));
//Swap(&a[left], &a[randi]);
//三目取中
int midi = GetMidNumi(a, left, right);
if(midi != left)
Swap(&a[midi], &a[left]);
int keyi = left;
while (left < right)
{
while (left<right && a[right] >= a[keyi])
{
right--;
}
while (left < right && a[left] <= a[keyi])
{
left++;
}
Swap(&a[left], &a[right]);
}
Swap(&a[keyi], &a[left]);
keyi = left;
//[begin, keyi - 1] keyi [keyi+1, end]
QuickSort1(a, begin, keyi - 1);
QuickSort1(a, keyi+1, end);
}
这就是hoare大佬研究出来的方法,其他方法都是这个大思想,单趟排出来的结果可能不一样,但是还是这个思想,选出key,左分小,右分大
- 挖坑法
挖坑法和hoare 选出来的数有区别 ,但还是左边比key小,右边比key大
主要变化是单趟,搞了一个临时变量,和坑位,右边找到小R就变成新坑位,左边开始找大找到了也变成新坑位,直到相遇之后把临时变量Key放进去,区间被分成[begin, hole - 1] hole [hole+1, end]
//挖坑法
void QuickSort2(int* a, int left, int right)
{
if (left >= right)
return;
int begin = left, end = right;
//三目取中
int midi = GetMidNumi(a, left, right);
if (midi != left)
Swap(&a[midi], &a[left]);
int key = a[left];
int hole = left;
while (left < right)
{
// 右边找小
while (left < right && a[right] >= key)
{
right--;
}
a[hole] = a[right];
hole = right;
// 左边找大
while (left < right && a[left] <= key)
{
left++;
}
a[hole] = a[left];
hole = left;
}
a[hole] = key;
//[begin, hole - 1] hole [hole+1, end]
QuickSort2(a, begin, hole - 1);
QuickSort2(a, hole + 1, end);
}
- 前后指针版本(最好)最简洁,好理解
单趟排出来和Hoare单趟也不太一样,但还是那个大思想
把比key大的值往右翻,比key小的值,翻到左边

//前后指针法
int PartSort3(int* a, int left, int right)
{
//三目取中
int midi = GetMidNumi(a, left, right);
if (midi != left)
Swap(&a[midi], &a[left]);
int keyi = left;
int prev = left;
int cur = left + 1;
while (cur <= right)//cur < right 外面是n-1 可能最后一个没比较
{
if (a[cur] < a[keyi] && ++prev != cur)
{
Swap(&a[cur], &a[prev]);
}
++cur;
}
Swap(&a[keyi], &a[prev]);
keyi = prev;
return keyi;
}
快排优化
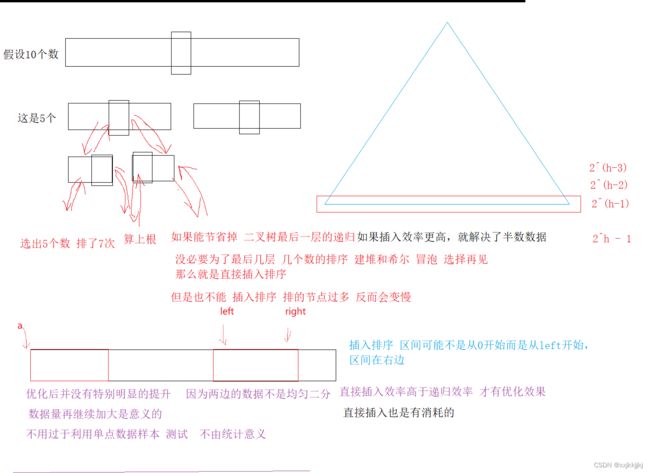
- 小区间优化
目的解决最后一层的递归次数过多,比如说下面左区间5个数排好递归了7次
要注意的就是插入排序的开始是a+left,还有闭区间要+1-[right-left+1]
会有一些提升,但是不明显,但是数据量加大后还是有一定作用的
我的理解是 虽然优化了后几层递归次数,但前面还是NlogN的时间复杂度,大概是半数数据
void QuickSort(int* a, int left, int right)
{
if (left >= right)
return;
//小区间优化--直接使用插入排序-优化后几层递归
if (right - left + 1 > 10)
{
int keyi = PartSort3(a, left, right);
QuickSort(a, left, keyi - 1);
QuickSort(a, keyi + 1, right);
}
else
{
InsertSort(a+left, right - left + 1);
}
}
解决有序数据的快排变慢
如果有序1,2,3,4…,左边选key或者右边选Key导致不能均分,使得快排效率变慢
2. 随机选key
//随机选key
int randi = left + (rand() % (right - left));
Swap(&a[left], &a[randi]);
范围是[left,right-1]这里面随机抽出一个来做key,注意到区间不是right,我试了下,如果选right在有序的情况下,一样烂
这种仍然能选到有序比如123…还是能选到1,但是数据量大了,纪律很小
- 三目取中(更科学)
[left,right]直接选出mid和left和right之中中间值,这样即使有序也可以均分了
int GetMidNumi(int* a, int left, int right)
{
int mid = (left + right) / 2;
if (a[left] > a[mid])
{
if (a[right] > a[left])
{
return left;
}
else
{
if (a[mid] < a[right])
{
return right;
}
else
{
return mid;
}
}
}
else//a[left] < a[mid]
{
if (a[right] > a[mid])
{
return mid;
}
else
{
if (a[left] > a[right])
{
return left;
}
else
{
return right;
}
}
}
}