【状态估计】用于描述符 LTI 和 LPV 系统的分析、状态估计和故障检测的算法(Matlab代码实现)
欢迎来到本博客 ❤️ ❤️
博主优势: 博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳ 座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 参考文献
4 Matlab代码、数据、文章讲解
1 概述
文献来源:
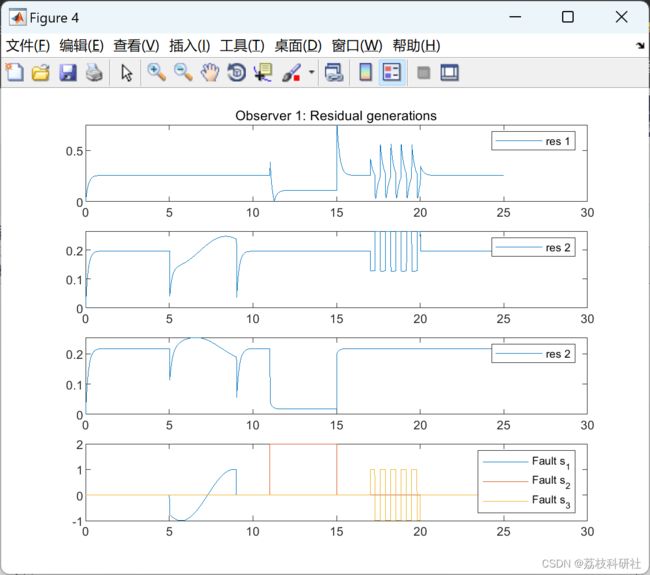
摘要:本文讨论了在LTI或LPV描述子框架中建模的系统的MATLAB/SCILAB工具箱的开发。给出了正则性、可解性、可控性和可观测性。包括全阶观测器和降阶观测器,比例观测器和比例积分观测器。其中一些观察人士考虑了未知的输入。可以作为基于状态估计和故障检测的观测器的辅助工具。这些观察者已经从最近发表的几篇论文中得到了考虑。通过建立观测库来实现故障的检测和隔离。这些观察者库可以通过选择输入/输出矩阵来建立,也可以使用所提出的算法自动建立。
许多系统都可以用非线性微分方程来建模,但是监控系统的设计是一项困难的任务。因此,对非线性系统进行线性化以获得线性时不变(LTI)系统是非常常见的,但这种表示在一个平衡点或工作点附近是有效的。
改进模型表示的一种方法是包含一些限制。如果限制是模型的一部分,那么系统就变成了描述符- lti (DLTI)表示。DLTI系统的主要优点是集成了静态关系(例如物理约束)和动态关系。这些考虑允许对广泛的过程进行建模,例如,在Dai, 1989;段,2010)。
Luenberger观测者存在的充分条件在(Hou and Muller, 1999;Darouach和Boutayeb, 1995)。(Darouach等人,1996)的作者提出了一种降阶未知输入观测,类似于(Chen和Patton, 1999)中研究的LTI系统的观测器。
详细文章讲解及数学模型见第4部分。
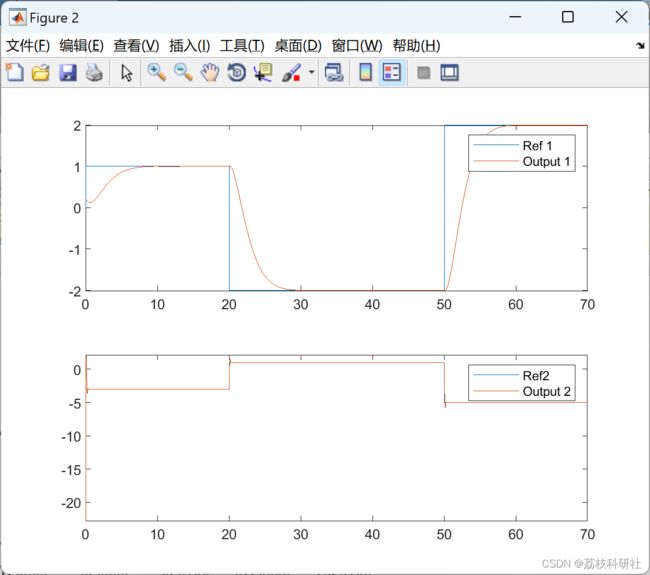
2 运行结果
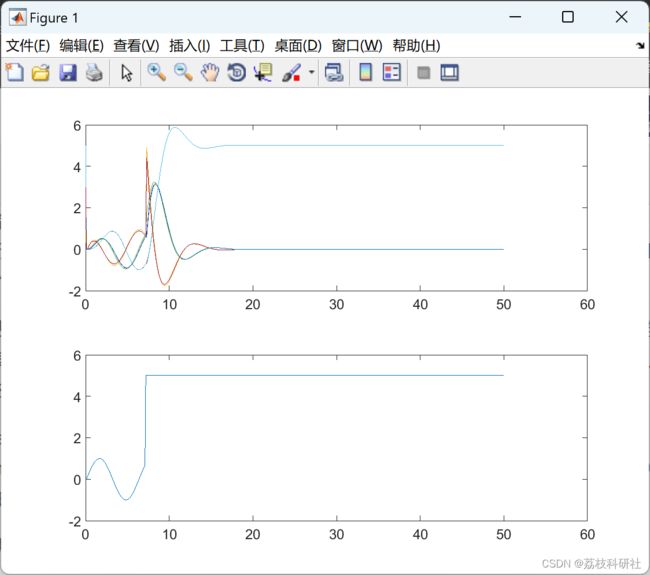
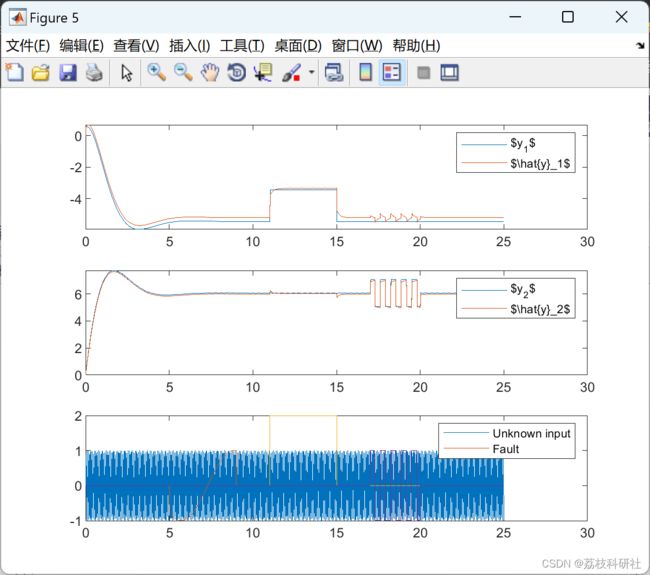
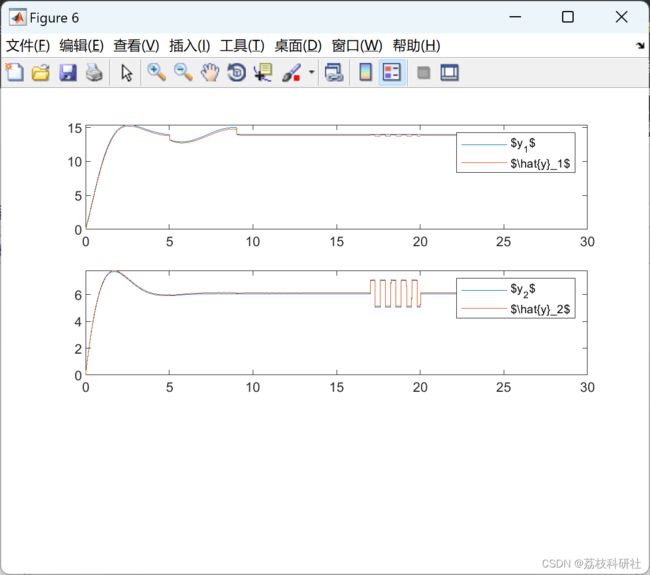
部分代码:
xe=[ 1 5 3 0]'% intial stimated states
ye(:,1)=C*xe % compute the initial output
t(1)=0;% initial time
u(1)=0;
% observer gains
% % if the system is observable then compute the restricted system equivalence systems by QR descomposition
disp('Simulation')
for k=1:50/Te
% Time counter
t(k+1)=t(k)+Te;
% input
if t(k)<7
u(k+1)=1;
else
u(k+1)=5;
end
% % the differentials equations can be solved by runge-kuta of four order
x1=x1+Te*(x3);
x2=x2+Te*(x1);
x4=x1;
x3=-x2-x4+u(k);
xx(:,k+1)=[x1 x2 x3 x4]';
y(:,k+1)=C*xx(:,k+1); % system output
% Observer
yi=[-Be1*u(k);y(:,k)]; % auxiliar for compute the observer
% Reduced order observer
% $z=Piz+Lyi+H*u $
% $\hat{x}=Mz+Fyi$
z(k+1)=z(k)+Te*(Pi*z(k)+L*yi+H*u(k)); %
xe(:,k+1)=M*z(k)+F*yi;
ye(:,k+1)=C*xe(:,k+1); % stimated output
% Generation of residuos
end
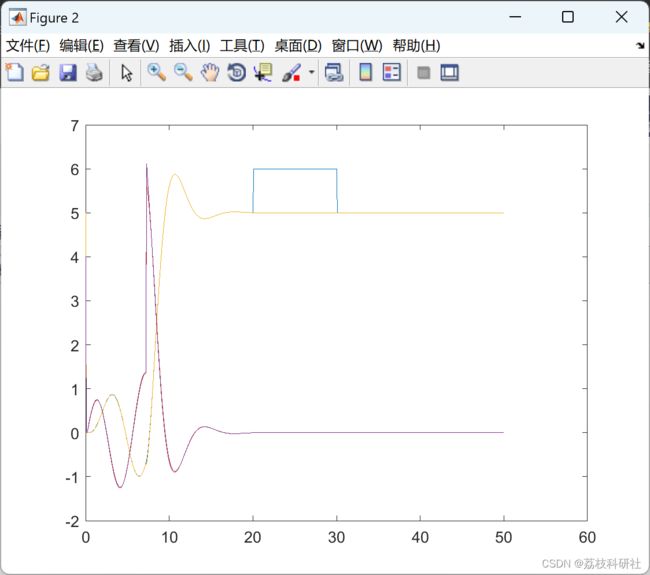
disp('PLOTS')
pause
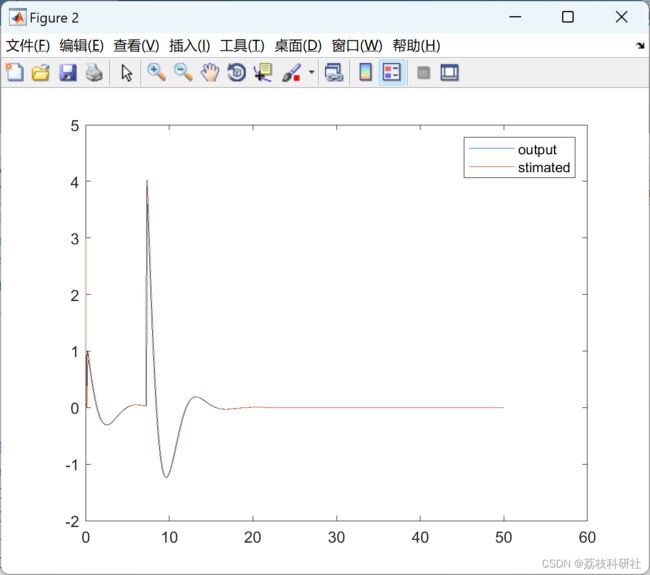
figure(2);
cla();
plot(t,y',t,ye')
legend('output', 'stimated')
n=size(A,1);
m=size(B1,2);
p=size(C,1);
if flag==1
P=sdpvar(n,n);
Y=sdpvar(m,n,'full');
Q=sdpvar(1,n,'full');
sdpvar g
% g=0.1
alpha=0;
Con=[P>=0,g>=0];
LMI=blkvar();
LMI(1,1)= (P*E'+S*Q)'*A'+Y'*B1'+A*(P*E'+S*Q)+B1*Y+B*B'+2*alpha*P;
LMI(1,2)=E*P'*C'+Q'*S'*C'+Y'*B2';
% (P*E'+S*Q)'*C'+Y'*B2';
LMI(2,2)=-g*eye(p);
LMI=sdpvar(LMI);
Con=[Con, LMI<=0]
op=sdpsettings('verbose',0,'solver','sedumi','sedumi.eps',1e-5);
solvesdp(Con,[],op)
P=double(P);
Y=double(Y);
Q=double(Q);
g=double(g);
% K=Y/((P*E'+S*Q))
K=Y/((P*E'+S*Q))
lamda=deig(A+B1*K,E)
% [Ccon, Rcon, Icon]=dcontr (E,A+B*K,B)
elseif flag==2
% g=0.01100
cvx_begin sdp
cvx_precision default
cvx_solver sedumi
variable g
variable P(n,n) symmetric
variable Y(m,n)
variable Q(1,n)
minimize g
P >= 0
[ (P*E'+S*Q)'*A'+Y'*B1'+A*(P*E'+S*Q)+B1*Y+B*B' E*P'*C'+Q'*S'*C'+Y'*B2' ; ...
(E*P'*C'+Q'*S'*C'+Y'*B2')' -g*eye(p)] <= 0
cvx_end
gamma = sqrt(g)
K=Y/((P*E'+S*Q));
lamda=deig(A+B1*K,E)
else
setlmis([]);
% create a blank LTI framework
P=lmivar(1,[n 1]); % declare X as a 3 脳 3 symmetrical matrix
Y=lmivar(2,[m n]); % declare Y as a n x n
Q=lmivar(2,[1 n]); % declare
lmiterm([1 1 1 P],A,E','s') % A*P*E' + *
lmiterm([1 1 1 Q],A*S,1,'s') % A*S*Q+*
lmiterm([1 1 1 Y],B1,1,'s') % B*Y+*
lmiterm([1 1 1 0],B*B') % B*B'+*
lmiterm([1 1 2 P'],E,C') % E*P'*C'
lmiterm([1 1 2 Q'],1,S'*C') % Q'*S'*C'
lmiterm([1 1 2 Y'],1,B2') % E*P'*C'
% lmiterm([1 1 1 P],2*5,1,'s') % B*Y+*
lmiterm([-2 1 1 P],1,1,'s') % P>0
% lmiterm([-3 1 1 Q],1,1) % P>0
Con=getlmis;
% c = mat2dec(Con,eye(3),eye(3),eye(1,n));
% options = [1e5,0,0,0,0];
% [copt,b] = mincx(Con,c,options);
[tmin b]=feasp(Con);
% [tmin b]=mincx(Con,-trac);
P=dec2mat(Con,b,P);
Y=dec2mat(Con,b,Y);
Q=dec2mat(Con,b,Q);
K=Y/((P*E'+S*Q));
lamda=deig(A+B*K,E);
3 参考文献
部分理论来源于网络,如有侵权请联系删除。