rt thread smart适配野火imx6ull开发板的KSZ8081网卡
原理图
野火和nxp的imx6ull都采用KSZ8081网卡,电路图一致。
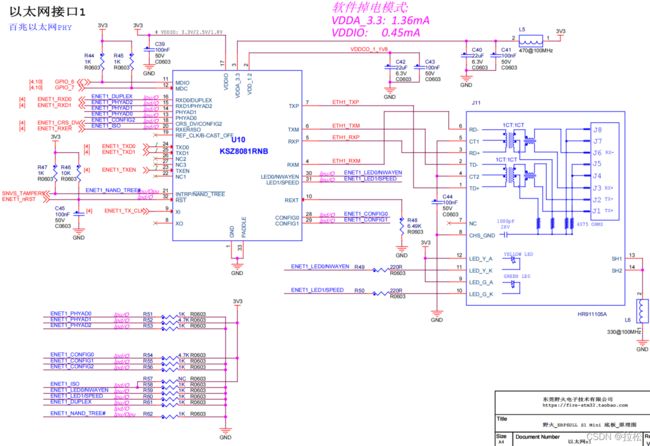
ENET1_nRST复位引脚连接在了74lv595上,因此需要先驱动74lv595。
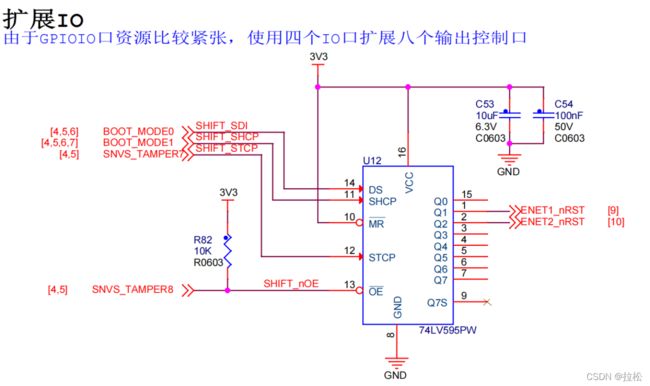
74lv595利用BOOT_MODE0、BOOT_MODE1、SNVS_TAMPER7、SNVS_TAMPER8四个引脚最多可以驱动8个引脚,但是野火的输出端只连接了两个。
引脚配置
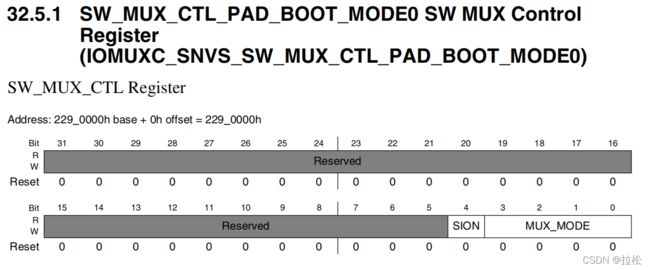
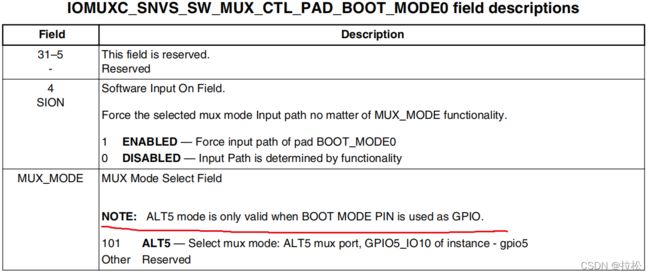
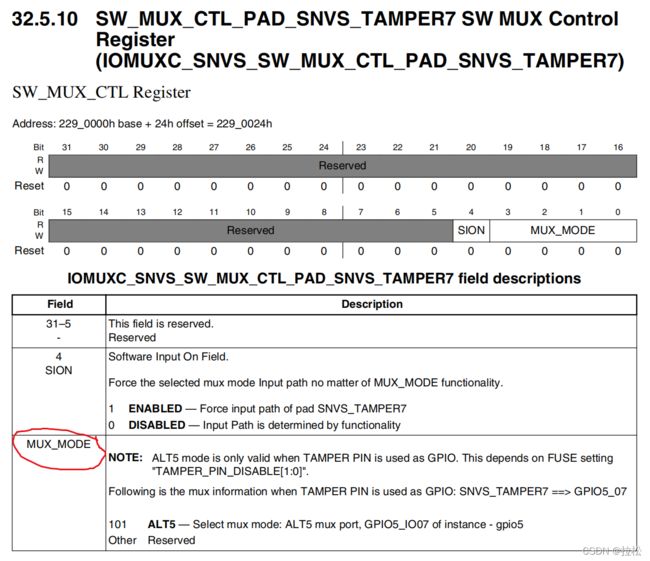
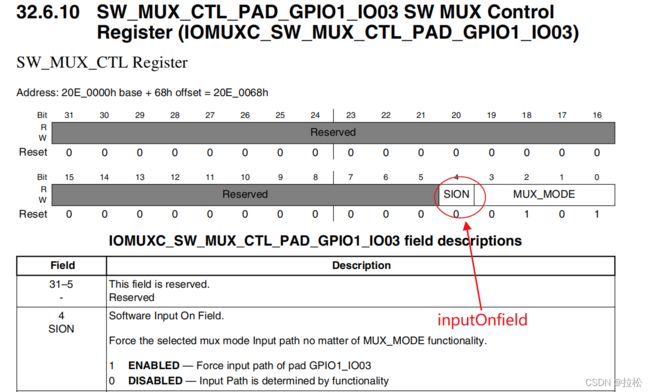
BOOT_MODE0、BOOT_MODE1、SNVS_TAMPER8四个引脚的复用功能寄存器如上图。需要将它们复用成如下引脚:
BOOT_MODE0——> GPIO5_IO10、
BOOT_MODE1——> GPIO5_IO11、
SNVS_TAMPER7——> GPIO5_IO07、
SNVS_TAMPER8——> GPIO5_IO08
关于这四个引脚是如何复位的,我参考了正点原子“蜂鸣器实验”章节,其原理图如下:
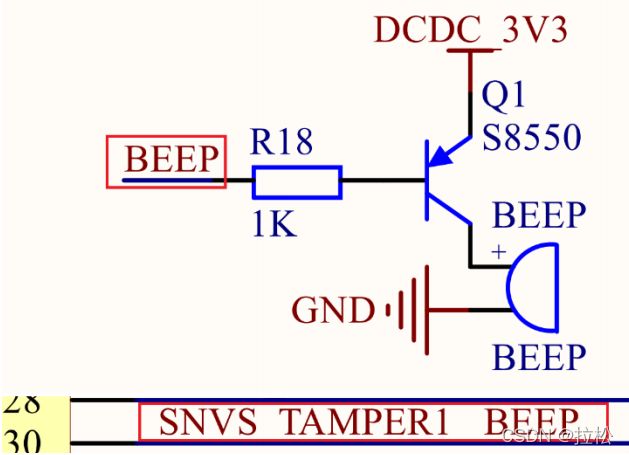
这里需要将SNVS_TAMPER1复用为——> GPIO5_IO01,其源码如下:
void beep_init(void)
{
/* 1、初始化IO复用,复用为GPIO5_IO01 */
IOMUXC_SetPinMux(IOMUXC_SNVS_SNVS_TAMPER1_GPIO5_IO01,0);
/* 2、、配置GPIO1_IO03的IO属性
*bit 16:0 HYS关闭
*bit [15:14]: 00 默认下拉
*bit [13]: 0 kepper功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 110 R0/6驱动能力
*bit [0]: 0 低转换率
*/
IOMUXC_SetPinConfig(IOMUXC_SNVS_SNVS_TAMPER1_GPIO5_IO01,0X10B0);
/* 3、初始化GPIO,GPIO5_IO01设置为输出 */
GPIO5->GDIR |= (1 << 1);
/* 4、设置GPIO5_IO01输出高电平,关闭蜂鸣器 */
GPIO5->DR |= (1 << 1);
}
/*
* @description : 蜂鸣器控制函数,控制蜂鸣器打开还是关闭
* @param - status : 0,关闭蜂鸣器,1 打开蜂鸣器
* @return : 无
*/
void beep_switch(int status)
{
if(status == ON)
GPIO5->DR &= ~(1 << 1); /* 打开蜂鸣器 */
else if(status == OFF)
GPIO5->DR |= (1 << 1); /* 关闭蜂鸣器 */
}
这里顺带讲一下DR 寄存器和GDIR 寄存器。
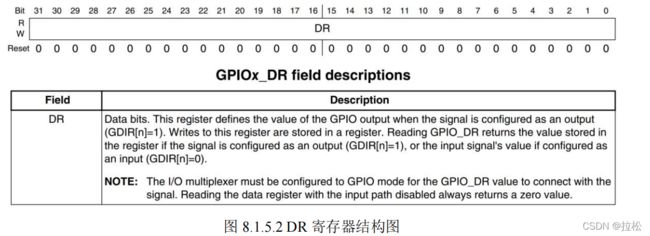
此寄存器是 32 位的,一个 GPIO 组最大只有 32 个 IO,因此 DR 寄存器中的每个位都对应 一个 GPIO。当 GPIO 被配置为输出功能以后,向指定的位写入数据那么相应的 IO 就会输出相 应的高低电平,比如要设置 GPIO1_IO00 输出高电平,那么就应该设置 GPIO1.DR=1。当GPIO被配置为输入模式以后,此寄存器就保存着对应 IO 的电平值,每个位对对应一个 GPIO,例如, 当 GPIO1_IO00 这个引脚接地的话,那么 GPIO1.DR 的 bit0 就是 0。
看完 DR 寄存器,接着看 GDIR 寄存器,这是方向寄存器,用来设置某个 GPIO 的工作方向的,即输入/输出,GDIR 寄存器结构如图 8.1.5.3 所示:
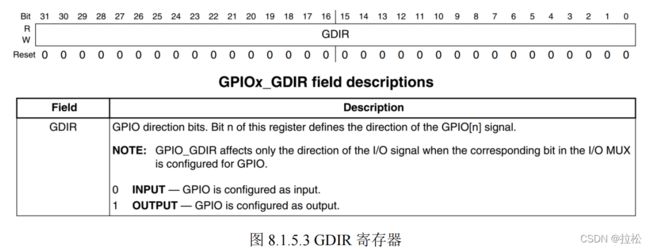
GDIR 寄存器也是 32 位的,此寄存器用来设置某个 IO 的工作方向,是输入还是输出。同样的,每个 IO 对应一个位,如果要设置 GPIO 为输入的话就设置相应的位为 0,如果要设置为
输出的话就设置为 1。比如要设置 GPIO1_IO00 为输入,那么 GPIO1.GDIR=0;
IOMUXC_SetPinMux & IOMUXC_SetPinConfig
/*!
* @brief Sets the IOMUXC pin mux mode.
* @note The first five parameters can be filled with the pin function ID macros.
*
* This is an example to set the ENET1_RX_DATA0 Pad as FLEXCAN1_TX:
* @code
* IOMUXC_SetPinMux(IOMUXC_ENET1_RX_DATA0_FLEXCAN1_TX, 0);
* @endcode
*
* This is an example to set the GPIO1_IO02 Pad as I2C1_SCL:
* @code
* IOMUXC_SetPinMux(IOMUXC_GPIO1_IO02_I2C1_SCL, 0);
* @endcode
*
* @param muxRegister The pin mux register.
* @param muxMode The pin mux mode.
* @param inputRegister The select input register.
* @param inputDaisy The input daisy.
* @param configRegister The config register.
* @param inputOnfield Software input on field.
*/
static inline void IOMUXC_SetPinMux(uint32_t muxRegister,
uint32_t muxMode,
uint32_t inputRegister,
uint32_t inputDaisy,
uint32_t configRegister,
uint32_t inputOnfield)
{
*((volatile uint32_t *)muxRegister) =
IOMUXC_SW_MUX_CTL_PAD_MUX_MODE(muxMode) | IOMUXC_SW_MUX_CTL_PAD_SION(inputOnfield);
if (inputRegister)
{
*((volatile uint32_t *)inputRegister) = IOMUXC_SELECT_INPUT_DAISY(inputDaisy);
}
}
/*!
* @brief Sets the IOMUXC pin configuration.
* @note The previous five parameters can be filled with the pin function ID macros.
*
* This is an example to set pin configuration for IOMUXC_GPIO1_IO02_I2C1_SCL:
* @code
* IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO02_I2C1_SCL, IOMUXC_SW_PAD_CTL_PAD_PUE_MASK | IOMUXC_SW_PAD_CTL_PAD_PUS(2U));
* @endcode
*
* @param muxRegister The pin mux register.
* @param muxMode The pin mux mode.
* @param inputRegister The select input register.
* @param inputDaisy The input daisy.
* @param configRegister The config register.
* @param configValue The pin config value.
*/
static inline void IOMUXC_SetPinConfig(uint32_t muxRegister,
uint32_t muxMode,
uint32_t inputRegister,
uint32_t inputDaisy,
uint32_t configRegister,
uint32_t configValue)
{
if (configRegister)
{
*((volatile uint32_t *)configRegister) = configValue;
}
}
for example
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0);
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO03_GPIO1_IO03, 0X10B0);
这 里 使 用 了 两 个 函 数 IOMUXC_SetPinMux 和 IOMUXC_SetPinConfig , 其 中 函 数 IOMUXC_SetPinMux 是 用 来 设 置 IO 复 用 功 能 的 , 最 终 肯 定 设 置 的 是 寄 存 器 “IOMUXC_SW_MUX_CTL_PAD_XX”。函数 IOMUXC_SetPinConfig 设置的是 IO 的上下拉、 速度等的,也就是寄存器“IOMUXC_SW_PAD_CTL_PAD_XX”。
函数 IOMUXC_SetPinMux 有 6 个参数,这 6 个参数的函数如下:
muxRegister : IO 的 复 用 寄 存 器 地 址 , 比 如 GPIO1_IO03 的 IO 复 用 寄 存 器 SW_MUX_CTL_PAD_GPIO1_IO03 的地址为 0X020E0068。
muxMode: IO 复用值,也就是 ALT0~ALT8,对应数字 0~8,比如要将 GPIO1_IO03 设置 为 GPIO 功能的话此参数就要设置为 5。
inputRegister:外设输入 IO 选择寄存器地址,有些 IO 在设置为其他的复用功能以后还需 要设置 IO 输入寄存器,比如 GPIO1_IO03 要复用为 UART1_RX 的话还需要设置寄存器 UART1_RX_DATA_SELECT_INPUT,此寄存器地址为 0X020E0624。
inputDaisy:寄存器 inputRegister 的值,比如 GPIO1_IO03 要作为 UART1_RX 引脚的话此 参数就是 1。
configRegister:未使用,函数 IOMUXC_SetPinConfig 会使用这个寄存器。
inputOnfield : IO 软 件 输 入 使 能 , 以 GPIO1_IO03 为 例 就 是 寄 存 器 SW_MUX_CTL_PAD_GPIO1_IO03 的 SION 位(bit4)。如果需要使能 GPIO1_IO03 的软件输入功能的话此参数应该为 1,否则的话就为 0。
函数 IOMUXC_SetPinConfig 有 6 个参数,其中前五个参数和函数 IOMUXC_SetPinMux 一 样,但是此函数只使用了参数 configRegister 和 configValue,cofigRegister 参数是 IO 配置寄存 器地址,比如 GPIO1_IO03 的 IO 配置寄存器为 IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03, 其地址为 0X020E02F4,参数 configValue 就是要写入到寄存器 configRegister 的值。同理,“示例代码 12.3.3.1”的 43 行展开以后就是:
IOMUXC_SetPinConfig(0x020E0068U, 0x5U, 0x00000000U, 0x0U, 0x020E02F4U, 0X10B0);
根据函数 IOMUXC_SetPinConfig 的源码可以知道,上面函数就是将寄存器 0x020E02F4 的值设置为 0X10B0。函数 IOMUXC_SetPinMux 和 IOMUXC_SetPinConfig 就讲解到这里,我们
以后就可以使用这两个函数来方便的配置 IO 的复用功能和 IO 配置。
imx6ull_iomuxc
art-pi smart里的imx6ull_iomuxc和上面两个函数类似,但也存在一些差别:
struct imx6ull_iomuxc
{
rt_uint32_t muxRegister;
rt_uint32_t muxMode;
rt_uint32_t inputRegister;
rt_uint32_t inputDaisy;
rt_uint32_t configRegister;
rt_uint32_t inputOnfield;
rt_uint32_t configValue;
};
void imx6ull_gpio_init(const struct imx6ull_iomuxc *gpio)
{
rt_uint32_t mux_reg_vaddr = 0;
rt_uint32_t input_reg_vaddr = 0;
rt_uint32_t config_reg_vaddr = 0;
mux_reg_vaddr = (rt_uint32_t)(gpio->muxRegister ? (rt_uint32_t)imx6ull_get_periph_vaddr(gpio->muxRegister) : gpio->muxRegister);
input_reg_vaddr = (rt_uint32_t)(gpio->inputRegister ? (rt_uint32_t)imx6ull_get_periph_vaddr(gpio->inputRegister) : gpio->inputRegister);
config_reg_vaddr = (rt_uint32_t)(gpio->configRegister ? (rt_uint32_t)imx6ull_get_periph_vaddr(gpio->configRegister) : gpio->configRegister);
IOMUXC_SetPinMux(mux_reg_vaddr, gpio->muxMode, input_reg_vaddr, gpio->inputDaisy, config_reg_vaddr, gpio->inputOnfield);
IOMUXC_SetPinConfig(mux_reg_vaddr, gpio->muxMode, input_reg_vaddr, gpio->inputDaisy, config_reg_vaddr, gpio->configValue);
}
#define IOMUXC_GPIO1_IO06_ENET1_MDIO 0x020E0074U, 0x0U, 0x020E0578U, 0x0U, 0x020E0300U
#define IOMUXC_GPIO1_IO07_ENET1_MDC 0x020E0078U, 0x0U, 0x00000000U, 0x0U, 0x020E0304U
static struct imx6ull_iomuxc mdio_gpio[2] =
{
{IOMUXC_GPIO1_IO06_ENET1_MDIO,0U,0xB029},
{IOMUXC_GPIO1_IO07_ENET1_MDC,0U,0xB0E9}
};
完全展开后是:
static struct imx6ull_iomuxc mdio_gpio[2] =
{
{0x020E0074U, 0x0U, 0x020E0578U, 0x0U, 0x020E0300U,0U,0xB029},
{0x020E0078U, 0x0U, 0x00000000U, 0x0U, 0x020E0304U,0U,0xB0E9}
};
注意点:0xB029(configValue)是用于设置0x020E0300U(configRegister)寄存器的。
NXP官方源码IAR
nxp官方也提供了以太网的IAR工程,里面正是用到了74lv595,可以在官方的sdk里找到代码。其74lv595相关的代码如下:
#define NXP74LV595_INPUT_STCP_GPIO GPIO5
#define NXP74LV595_INPUT_STCP_PIN 7U
#define NXP74LV595_INPUT_OE_GPIO GPIO5
#define NXP74LV595_INPUT_OE_PIN 8U
#define NXP74LV595_INPUT_SDI_GPIO GPIO5
#define NXP74LV595_INPUT_SDI_PIN 10U
#define NXP74LV595_INPUT_SHCP_GPIO GPIO5
#define NXP74LV595_INPUT_SHCP_PIN 11U
typedef enum _NXP74LV595_signal
{
kSignal_NXP74LV595_Low = 0U,
kSignal_NXP74LV595_High = 1U
} NXP74LV595_signal_t;
typedef enum _NXP74LV595_parOutputPins
{
kNXP74LV595_HDMI_nRST = 0U,
kNXP74LV595_ENET1_nRST = 1U,
kNXP74LV595_ENET2_nRST = 2U,
kNXP74LV595_CAN1_2_STBY = 3U,
kNXP74LV595_BT_nPWD = 4U,
kNXP74LV595_CSI_RST = 5U,
kNXP74LV595_CSI_PWDN = 6U,
kNXP74LV595_LCD_nPWREN = 7U
} NXP74LV595_parOutputPins_t;
/*Initial output value of NXP74LV595*/
static uint8_t s_NXP74LV595Output = 0U;
void Delay(uint32_t ticks)
{
while (ticks--)
{
__NOP();
}
}
/* Set parallel pins output value of 74LV595 */
void BOARD_NXP74LV595_SetValue(NXP74LV595_parOutputPins_t pin, NXP74LV595_signal_t value)
{
uint8_t shiftNumber;
uint8_t mask;
/*Init GPIO pins and open output gate of 74LV595*/
NXP74LV595_INPUT_OE_GPIO->DR &= ~(1U << NXP74LV595_INPUT_OE_PIN);
NXP74LV595_INPUT_OE_GPIO->GDIR |= (1U << NXP74LV595_INPUT_OE_PIN);
NXP74LV595_INPUT_STCP_GPIO->GDIR |= (1U << NXP74LV595_INPUT_STCP_PIN);
NXP74LV595_INPUT_SDI_GPIO->GDIR |= (1U << NXP74LV595_INPUT_SDI_PIN);
NXP74LV595_INPUT_SHCP_GPIO->GDIR |= (1U << NXP74LV595_INPUT_SHCP_PIN);
/*Calculate all parallel pins output value that will be set*/
s_NXP74LV595Output = (s_NXP74LV595Output & (~(1U << pin))) | (value << pin);
for (shiftNumber = 0; shiftNumber < 8; shiftNumber++)
{
/*High data bits transfer first*/
mask = (s_NXP74LV595Output >> (7 - shiftNumber)) & 1U;
if (0 == mask)
{
NXP74LV595_INPUT_SDI_GPIO->DR &= ~(1U << NXP74LV595_INPUT_SDI_PIN);
}
else
{
NXP74LV595_INPUT_SDI_GPIO->DR |= (1U << NXP74LV595_INPUT_SDI_PIN);
}
/*Contents of shift register shifted.*/
NXP74LV595_INPUT_SHCP_GPIO->DR &= ~(1U << NXP74LV595_INPUT_SHCP_PIN);
Delay(1000);
NXP74LV595_INPUT_SHCP_GPIO->DR |= (1U << NXP74LV595_INPUT_SHCP_PIN);
Delay(1000);
}
/*Contents of shift register stages are transferred to the storage register and parallel output stages*/
NXP74LV595_INPUT_STCP_GPIO->DR &= ~(1U << NXP74LV595_INPUT_STCP_PIN);
Delay(1000);
NXP74LV595_INPUT_STCP_GPIO->DR |= (1U << NXP74LV595_INPUT_STCP_PIN);
Delay(1000);
}
NXP的uboot源码
uboot里也有以太网驱动的代码,其中74lv595相关的代码如下:
我找的是野火的uboot代码,源码路径为board\freescale\mx6ullevk\mx6ullevk.c
#define IOX_SDI IMX_GPIO_NR(5, 10)
#define IOX_STCP IMX_GPIO_NR(5, 7)
#define IOX_SHCP IMX_GPIO_NR(5, 11)
#define IOX_OE IMX_GPIO_NR(5, 8)
static iomux_v3_cfg_t const iox_pads[] = {
/* IOX_SDI */
MX6_PAD_BOOT_MODE0__GPIO5_IO10 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_SHCP */
MX6_PAD_BOOT_MODE1__GPIO5_IO11 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_STCP */
MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL),
/* IOX_nOE */
MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL),
};
static enum qn_level seq[3][2] = {
{0, 1}, {1, 1}, {0, 0}
};
static enum qn_func qn_output[8] = {
qn_reset, qn_reset, qn_reset, qn_enable, qn_disable, qn_reset,
qn_disable, qn_disable
};
static void iox74lv_init(void)
{
int i;
gpio_direction_output(IOX_OE, 0);
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
gpio_direction_output(IOX_SDI, seq[qn_output[i]][0]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
gpio_direction_output(IOX_STCP, 0);
udelay(500);
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
gpio_direction_output(IOX_SDI, seq[qn_output[i]][1]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
gpio_direction_output(IOX_STCP, 0);
udelay(500);
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
};
void iox74lv_set(int index)
{
int i;
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
if (i == index)
gpio_direction_output(IOX_SDI, seq[qn_output[i]][0]);
else
gpio_direction_output(IOX_SDI, seq[qn_output[i]][1]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
gpio_direction_output(IOX_STCP, 0);
udelay(500);
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
for (i = 7; i >= 0; i--) {
gpio_direction_output(IOX_SHCP, 0);
gpio_direction_output(IOX_SDI, seq[qn_output[i]][1]);
udelay(500);
gpio_direction_output(IOX_SHCP, 1);
udelay(500);
}
gpio_direction_output(IOX_STCP, 0);
udelay(500);
/*
* shift register will be output to pins
*/
gpio_direction_output(IOX_STCP, 1);
};
KSZ8081驱动
74lv595驱动
#ifndef __DRV_74LV595_H__
#define __DRV_74LV595_H__
#include drv_eth驱动

/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-06-16 songchao support emac driver
* 2021-06-29 songchao add phy link detect
* 2021-08-13 songchao support dual mac and reduse copy
*/
#include "drv_74lv595.h"
#include "drv_eth.h"
#define DBG_TAG "drv.enet"
#define DBG_LVL DBG_LOG
#include kernel\bsp\yh\libraries\sdk\devices\MCIMX6Y2\drivers\fsl_phy.c添加如下宏定义
