Linux MMC 驱动子系统详解
Linxu MMC 驱动子系统
文章目录
- Linxu MMC 驱动子系统
-
- 硬件关联
- 目录说明
- mmc子系统的逻辑架构
- 设备-总线-驱动模型
-
- 一、MMC驱动抽象模型
- 二、SDIO驱动抽象模型
- 三、MMC/SDIO总线
-
- 1. 总线结构体定义
- 2. 总线注册
- 3. 驱动注册
- 4. 设备注册
- 四、MMC设备控制器(mmc host)
-
- 1. 控制器结构体定义
- MMC驱动注册
- MMC设备注册
- 注册过程(瑞芯微MMC驱动源码)
- mmc卡(mmc type card)协议相关操作
- DTS配置
- 参考资料
SD/SDIO/MMC 驱动是一种基于 SDMMC 和 SD SPI 主机驱动的协议级驱动程序,目前已支持 SD 存储器、SDIO 卡和 eMMC 芯片。
因为linux内核mmc子系统里面已经实现了这些协议,我们以后并不需要重新实现这些,只需要对协议有个简单的了解。
mmc是比较老的存储卡了,sd是mmc的替代者,sdio是基于sd而额外开发出的一种io接口卡。
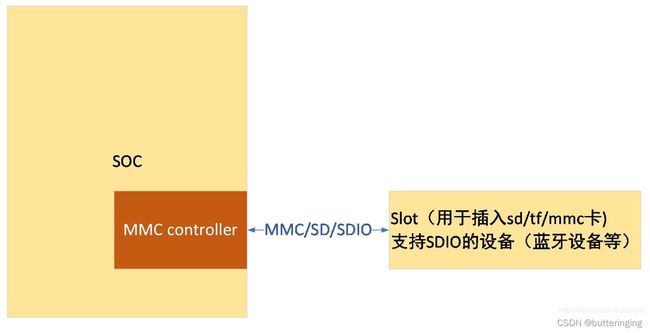
硬件关联
CPU、MMC controller、存储设备之间的关联如下图所示,主要包括了MMC controller、总线、存储卡等内容的连接,针对控制器与设备的总线连接,主要包括时钟、数据、命令三种类型的引脚,而这些引脚中的cd引脚主要用于卡的在位检测,当mmc controller检测到该位的变化后,则会进行mmc card的注册或注销操作。
目录说明
针对mmc子系统,在代码实现上主要包括mmc core、mmc block、 mmc host这三个模块
- mmc card:衔接最上层应用,主要用于实现mmc block驱动以及mmc driver即mmc层驱动(实际上我研究的源代码并没有这个目录(5.15.0-52-generic),猜测是合并到了core目录下);
- 而mmc core:实现mmc/sd/sdio协议,主要包括mmc 总线、sdio总线的实现、mmc device、mmc driver的注册接口、mmc host与mmc card的注册与注销接口等内容。
- mmc host:存放各个mmc/sd/sdio控制器的驱动代码,最终操作mmc/sd/sdio卡的部分;
mmc子系统的逻辑架构
MMC子系统从上到下分为3层
-
块设备层(MMC card):与Linux的块设备子系统对接,实现块设备驱动以及完成请求,如sys_open调用;通过调用core接口函数(具体如host->ops->rquest),驱动MMC core抽象出来的虚拟的card设备,如mmc、sd、tf卡,实现读写数据。
-
核心层(MMC core):是不同协议和规范的实现,为MMC控制器层和块设备驱动层提供接口函数。
核心层封装了 MMC/SD 卡的命令(CMD),例如存储卡的识别、设置、读写、识别、设置等命令。
MMC核心层由三个部分组成:MMC,SD和SDIO,分别为三类设备驱动提供接口函数;
core.c 把 MMC 卡、 SD 卡的共性抽象出来,它们的差别由 sd.c 和 sd_ops.c 、 mmc.c 和 mmc_ops.c 来完成。
-
控制器层(MMC host):主机端MMC controller的驱动,依赖于平台,由struct mmc_host描述。
围绕此结构设计了struct mmc_host_ops(访问方法)、struct mmc_ios(相关参数)、struct mmc_bus_ops(电源管理和在位检测方法)
针对不同芯片,实现不同控制器对应的驱动代码。

块设备层与Linux的块设备子系统对接,实现块设备驱动以及完成请求,具体协议经过核心层的接口,最终通过控制器层完成传输,对MMC设备进行实际的操作。
更详细的结构图如下,指明了个部分的相关实现文件:

mmc core指的是mmc 子系统的核心,这里的mmc表示的是mmc总线、结构、设备相关的统称,而下方文件名的mmc单指mmc卡,区别于sd卡和sdio卡。
drivers/mmc/core/mmc.c(提供接口),
drivers/mmc/core/mmc-ops.c(提供和mmc type card协议相关的操作)
在mmc core层中的bus指的是由core抽象出来的虚拟总线,而与物理卡连接的MMC bus是物理的实际总线,是和host controller直接关联的。
设备-总线-驱动模型
针对MMC子系统而言,主要使用了系统中的两个模型:设备-总线-驱动模型、块设备驱动模型。
在Linux驱动模型框架下,三者对应结构体以及MMC驱动子系统对应的实现关系如下:
- 总线 (struct bus_type) —— MMC总线( mmc_bus )
- 设备(struct device) —— 被封装在platform_device下的主设备 host
- 驱动 (struct device_driver) —— 依附于MMC总线的MMC驱动( mmc_driver )
三者之间的关联图如下,每一个具体的总线均包括设备与驱动两部分,而每一个具体总线的所有添加的设备均链接至device下,每一个总线的所有注册的驱动均链接至drivers,而bus接口所有实现的功能也可以大致分为总线的注册、设备的注册、驱动的注册这三个部分。
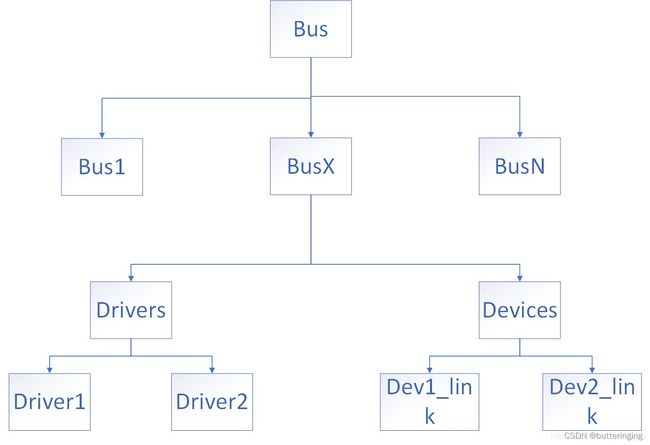
设备和对应的驱动必须依附于同一种总线
一、MMC驱动抽象模型
MMC驱动模型也是基于实际的硬件连接进行抽象的
- 针对通信总线,抽象出mmc_bus;
- 针对mmc controller,该子系统抽象为mmc_host,用于描述一个进行设备通信的控制器,提供了相应的访问接口(记为mmc_host->request);
- 针对mmc、sd、tf卡具体设备,该子系统抽象为mmc_card,用于描述卡信息。mmc子系统提供年rescan接口用于mmc card的注册;
- 针对mmc、sd、tf,mmc子系统完成了统一的mmc driver,针对mmc总线规范以及SD规范,其已经详细的定义了一个存储卡的通信方式、通信命令,因此LINUXmmc子系统定义了mmc driver,用于和mmc、sd、tf等卡的通信,而不需要驱动开发人员来开发卡驱动。

特点:
- mmc总线模型仅注册一个驱动类型,即mmc driver
- 一个mmc host与一个mmc card绑定
- mmc card属于热插拔的设备,而mmc card的创建主要由mmc host负责探测与创建,mmc host根据卡在位检测引脚,当检测到mmc card的存在后,即创建mmc card,同时注册至mmc bus上,并完成与mmc driver的绑定操作。
- host和card可以分别理解为 MMC device的两个子设备:MMC主设备和MMC从设备,其中host为集成于MMC设备内部的MMC controller,card为MMC设备内部实际的存储设备。
二、SDIO驱动抽象模型
sdio总线驱动模型和mmc类似,结构体上的区别为其driver类型为sdio_driver,并增加了sdio_func结构体变量(该结构体包含了该sdio设备相关的厂商id、设备id,同时包含了mmc_card)
因sdio主要突出接口概念,其设备端可以连接wifi、gps等设备,因此其外设备驱动需要由驱动工程师自己实现,sdio驱动模块不提供对应的驱动。
三、MMC/SDIO总线
总线接口实现的功能可分为总线的注册、设备的注册、驱动的注册这三个部分。
1. 总线结构体定义
结构体定义位于core\bus.c
static struct bus_type mmc_bus_type = {
// 总线名称
.name = "mmc",
.dev_groups = mmc_dev_groups,
// match接口用于实现mmc card与mmc driver的匹配检测,返回值均为1;
.match = mmc_bus_match,
// 应用层通知接口,用于添加该mmc bus的uevent参数(在调用device_add时,会调用kobject_uevent向应用层发送设备添加相关的事件,而kobject_uevent会调用该device所属bus和class的uevent接口,添加需要发送到应用的event参数
.uevent = mmc_bus_uevent,
// probe接口主要用于mmc card与mmc driver匹配成功后,则会调用该mmc bus的probe接口实现探测操作;
.probe = mmc_bus_probe,
// remove接口主要用于mmc card与mmc driver解绑时,调用该接口,进行remove操作(对于mmc drivemmc_ops
.shutdown = mmc_bus_shutdown,
// pm是电源管理相关的接口。
.pm = &mmc_bus_pm_ops,
};
总线匹配接口 .mmc_bus_match
当向linux系统总线添加设备或驱动时,总是会调用各总线对应的match匹配函数来判断驱动和设备是否匹配。
此处的mmc_bus_match并没有进行匹配检测,直接返回1,表示mmc子系统实现的mmc driver可匹配所有注册至mmc bus上的mmc card
*sdio总线结构体
位于sdio_bus.c
static struct bus_type sdio_bus_type = {
.name = "sdio",
.dev_groups = sdio_dev_groups,mmc_ops
.match = sdio_bus_match, // 根据id_table来匹配
.uevent = sdio_bus_uevent,
.probe = sdio_bus_probe,
.remove = sdio_bus_remove,
.pm = &sdio_bus_pm_ops,
};
2. 总线注册
调用入口位于core/core.c,通过mmc_init()实现。
core/core.c
subsys_initcall(mmc_init);
static int __init mmc_init(void)
{
int ret;
// 将mmc总线注册到linux的总线系统中,管理块设备
ret = mmc_register_bus();
// 注册mmc_host_class
ret = mmc_register_host_class();
// 注册sido总线到linux的总线系统中,管理sdio接口类型的设备
ret = sdio_register_bus();
return 0;
}
主要工作是:
a. mmc_register_bus注册mmc总线,这个总线主要是为card目录里实现的mmc设备驱动层和mmc控制器实例化一个mmc(包括sd/sdio)设备对象建立的。
b. sdio_register_bus这是sdio的部分,它比较特殊,需要额外的一条总线
具体包括两个方面:
- 利用 bus_register() 注册 mmc_bus,包括mmc总线和sdio总线。对应sysfs下的 /sys/bus/mmc/ 目录。
- 利用 class_register() 注册 mmc_host_class 。对应sysfs下的 /sys/class/mmc_host 目录。
core/bus.c
int mmc_register_bus(void)
{
// 实际调用内核接口,注册总线
return bus_register(&mmc_bus_type);
}
core/sdio_bus.c
int sdio_register_bus(void)
{
return bus_register(&sdio_bus_type);
}
3. 驱动注册
mmc_dirver的注册、注销接口是对内核函数的封装。实现将mmc_driver注册到mmc_bus总线中。
调用入口位于core/block.c,通过mmc_blk_init()实现,先给出mmc设备结构体的定义:。
static struct mmc_driver mmc_driver = {
.drv = {device_register
.name = "mmcblk",
.pm = &mmc_blk_pm_ops,
},
.probe = mmc_blk_probe, // probe回调函数
.remove = mmc_blk_remove,
.shutdown = mmc_blk_shutdown,
};
入口函数:
core/block.c
module_init(mmc_blk_init);
static int __init mmc_blk_init(void)
{
int res;
// 注册mmc_rpmb_bus总线
res = bus_register(&mmc_rpmb_bus_type);
res = alloc_chrdev_region(&mmc_rpmb_devt, 0, MAX_DEVICES, "rpmb");
// 注册块设备,申请块设备号
res = register_blkdev(MMC_BLOCK_MAJOR, "mmc");
// 将mmc_driver注册到mmc_bus总线系统中
res = mmc_register_driver(&mmc_driver);
return 0;
}
core/bus.c
int mmc_register_driver(struct mmc_driver *drv)
{
drv->drv.bus = &mmc_bus_type;
// 实际调用内核接口,注册设备到总线系统
return driver_register(&drv->drv);
}
// 使用EXPORT_SYMBOL将函数以符号的方式导出给其他模块使用。
EXPORT_SYMBOL(mmc_register_driver);
主要步骤包括:
a. 通过 register_blkdev() 向内核注册块设备。(仅注册,初始化的其他操作在mmc_driver结构体的prob接口中完成)
借助该块设备驱动模型,将mmc card与vfs(虚拟文件系统)完成了关联,即可通过系统调用借助VFS模型实现对块设备的读写访问操作。
b. 调用 mmc_register_driver() 将 mmc_driver 注册到 mmc_bus 总线系统。简单封装,和大部分驱动注册方式一致。
*sdio驱动注册
这两个接口的实现与mmc_driver的实现类似,均是简单的对driver_register/driver_unregister的封装(还有设置driver需要绑定的bus_type)
sdio_uart.c
module_init(sdio_uart_init);
static int __init sdio_uart_init(void)
{
// ……
ret = tty_register_driver(tty_drv);
ret = sdio_register_driver(&sdio_uart_driver);
// ……
}
sdio_bus.c
int sdio_register_driver(struct sdio_driver *drv)
{
drv->drv.name = drv->name;
drv->drv.bus = &sdio_bus_type;
return driver_register(&drv->drv);
}
EXPORT_SYMBOL_GPL(sdio_register_driver);
4. 设备注册
主要包括mmc card内存的申请、mmc card的注册、mmc card的注销等接口。
调用入口位于实际host设备的驱动文件中,通过xxx_driver实现。下面以mvsdio驱动为例分析。
host/mvsdio.c
module_platform_driver(mvsd_driver);
static struct platform_driver mvsd_driver = device_register{
.probe = mvsd_probe,
.remove = mvsd_remove,
.driver = {
.name = DRIVER_NAME,
.probe_type = PROBE_PREFER_ASYNCHRONOUS,
.of_match_table = mvsdio_dt_ids,
},
};
// 在probe回调中调用
static int mvsd_probe(struct platform_device *pdev)
{
// ……
// 实例化一个控制器对象
mmc = mmc_alloc_host(sizeof(struct mvsd_host), &pdev->dev);
// ……
mmc->ops = &mvsd_ops; // 控制器操作集
// ……(一系列对控制器对象的初始化工作)
ret = mmc_add_host(mmc);
// ……
}
// 控制器操作集,编写控制器驱动的一个主要任务就是实现这个操作集
static const struct mmc_host_ops mvsd_ops = {
.request = mvsd_request, // 最终执行硬件操作的函数,参数由核心层提供,由核心层更上一层的card设备驱动层向下调用
.get_ro = mmc_gpio_get_ro, // 判断是否写保护
.set_ios = mvsd_set_ios, // 配置控制器的函数
.enable_sdio_irq = mvsd_enable_sdio_irq, // 与sdio相关
};
host.c
mmc host子系统提供了延迟队列机制,在执行mmc_alloc_host、mmc_add_host后,则完成了mmc card rescan延迟工作队列及其处理接口的创建INIT_DELAYED_WORK
若要触发mmc card rescan(即调度工作队列),则调用mmc_detect_change接口,即可触发mmc card rescan(即完成mmc_host->detect队列的调度);
struct mmc_host *mmc_alloc_host(int extra, struct device *dev)
{
// ……
// 将mmc_rescan指定为延时工作队列的工作函数
INIT_DELAYED_WORK(&host->detect, mmc_rescan);
// ……
}
EXPORT_SYMBOL(mmc_alloc_host);
mmc_rescan函数的大致调用流程如下,由mmc子系统通过mmc card的rescan机制,实现mmc card的自动检测及注册机制,依次完成了对sdio、sd和mmc设备的添加与移除操作。
换句话说,是使用事件的触发监控机制完成了卡(mmc,sd,sdio)的热插拔处理。
mmc_rescan[core.c]-->
mmc_rescan_try_freq[core.c]-->
mmc_attach_sdio[sdio.c]-->
mmc_attach_bus[core.c]
mmc_sdio_init_card[sdio.c]-->
mmc_alloc_card[bus.c]
sdio_init_func[sdio.c]-->
sdio_alloc_func[sdio_bus.c]
mmc_add_card[bus.c]
sdio_add_func[sdio_bus.c]
mmc_attach_sd[sd.c]-->
mmc_attach_bus[core.c]
mmc_sd_init_card[sd.c]-->
mmc_alloc_card[bus.c]
mmc_add_card[bus.c]
mmc_attach_mmc[mmc.c]-->
mmc_attach_bus[core.c]
mmc_init_card[mmc.c]-->
mmc_alloc_card[bus.c]
mmc_add_card[bus.c]
从mmc_rescan调用关系中可以看出,mmc设备注册的过程依次完成了sdio设备、sd卡和mmc卡设备的初始化。
A. mmc_attach_sdio()
SDIO卡初始化的入口
a. 向卡发送CMD5命令,该命令有两个作用:
第一,通过判断卡是否有反馈信息来判断是否为SDIO设备mmc_send_io_op_cond():
- 如果有响应,并且响应中的MP位为0,说明对应卡槽中的卡为SDIO卡,进而开始SDIO卡的初始化流程
- 如果命令没有响应,则说明对应卡槽的卡为SD或MMC卡,进而开始SD/MMC卡的初始化流程(sdio卡时有魄力sdio协议,sd卡使用sd协议)
- 如果有响应,且响应中的MP位为说明这个卡mmc_alloc_card不但是SDIO卡,同时也时SD卡,也就是所谓的combo卡,则进行combo卡的初始化流程mmc_sdio_ops)
第二,如果是SDIO设备,就会给host反馈电压信息,就是说告诉host,本卡所能支持的电压是多少多少。
b. 设置sdio卡的总线操作集mmc_attach_bus(),传入struct mmc_bus_ops类型的实现mmc_sdio_ops。
void mmc_attach_bus(struct mmc_host *host, const struct mmc_bus_ops *ops)
{
host->bus_ops = ops;
}
c. host根据SDIO卡反馈回来的电压要求,给其提供合适的电压mmc_select_voltage()
d. 对sdio卡进行探测和初始化mmc_sdio_init_card()
e. 注册SDIO的各个功能模块sdio_init_func()
f. 注册SDIO卡mmc_add_card()
g. 将所有SDIO功能添加到device架构中sdio_add_func()
mmc_alloc_card():
调用device模型对应的接口完成device类型变量的初始化,并完成mmc_card与mmc_host的绑定。
mmc_add_card():
- 调用device_add,完成将该mmc_card注册至mmc bus上;
- 设置mmc_card的状态为在位状态。
sdio func
sdio_func的注册与注销接口对应于mmc_card的注册与注销接口。主要函数有sdio_alloc_func、sdio_add_func、sdio_remove_func、sdio_release_func(相比mmc card,多了针对acpi的配置调用)
B. mmc_attach_sd()
SD卡初始化的入口
a. 发送CMD41指令,(sd卡支持该指令,但mmc卡不支持,所以可以以此区分)mmc_send_app_op_cond()
b. 设置sdio卡的总线操作集mmc_attach_bus(),传入struct mmc_bus_ops类型的实现mmc_sd_ops。
c. 设置合适的电压mmc_select_voltage()
d. 调用mmc_sd_init_card()(探测和初始化),获取mmc card的csd、cid,并创建mmc_card,并对mmc card进行初始化(如是否只读等信息)
e.调用mmc_add_card(),将该mmc_card注册至mmc_bus中,该接口会调用device_register将mmc_card注册至mmc_bus上,而这即触发mmc_driver与mmc_card的绑定流程,从而调用mmc_driver->probe接口,即执行mmc block device的注册操作(待解决,没有找到device_register相关代码)。
c. mmc_attach_mmc()
mmc卡初始化入口
a. 发送CMD1指令mmc_send_op_cond()
b. 设置mmc卡的总线操作集mmc_attach_bus(),传入struct mmc_bus_ops类型的实现mmc_ops。
c. 选择一个card和host都支持的最低工作电压mmc_select_voltage()
d. 初始化card使其进入工作状态mmc_init_card()
e. 为card构造对应的mmc_card并且注册到mmc_bus中mmc_add_card(),之后mmc_card就挂在了mmc_bus上,会和mmc_bus上的block(mmc_driver)匹配起来。相应block(mmc_driver)就会进行probe,驱动card,实现card的实际功能(也就是存储设备的功能)。会对接到块设备子系统中。
上面多次提到了mmc_bus_ops结构体,这是一个定义在core/core.h中的,用于表示总线操作的结构体。
struct mmc_bus_ops {
void (*remove)(struct mmc_host *);
void (*detect)(struct mmc_host *);
int (*pre_suspend)(struct mmc_host *);
int (*suspend)(struct mmc_host *);
int (*resume)(struct mmc_host *);
int (*runtime_suspend)(struct mmc_host *);
int (*runtime_resume)(struct mmc_host *);
int (*alive)(struct mmc_host *);
int (*shutdown)(struct mmc_host *);
int (*hw_reset)(struct mmc_host *);
int (*sw_reset)(struct mmc_host *);
bool (*cache_enabled)(struct mmc_host *);
int (*flush_cache)(struct mmc_host *);
};
四、MMC设备控制器(mmc host)
1. 控制器结构体定义
该模块最重要的数据结构为mmc_host,位于core/host.h文件,用于描述一个mmc controller
而围绕着mmc controller又定义了相应的数据结构,用于描述mmc controller的各种行为(包括针对该mmc controller的访问方法抽象而来的数据结构mmc_host_ops、该mmc controller相关的参数抽象而来的数据结构体mmc_ios、针对mmc card相关的电源管理及在位检测方法抽象而来的数据结构mmc_bus_ops)
部分成员如下:
struct device class_dev:
host对应的device,用于借助设备模型与系统中注册的设备、class完成关联。const struct mc_host_ops *ops:
定义本mmc_host的操作接口,包括与mmccard通信的接口request、卡检测相关的接口等。- 块设备相关参数,包括段大小、块大小等。
u32 capsu32 caps2:
指示host支持的功能特性,包括4bit数据模式、mmc high speed mode、sd high speed mode、spi mode、8bit data、noneremovable mode(emmc mode)、cd与wp引脚的active high/low等等。
MMC驱动注册
调用入口位于mmc/core/block.c,将mmc_driver注册到mmc_bus总线中.
主要步骤包括:
-
通过 register_blkdev() 向内核注册块设备。
借助该块设备驱动模型,将mmc card与vfs完成了关联,即可通过系统调用借助VFS模型实现对块设备的读写访问操作。
-
调用 driver_register() 将 mmc_driver 注册到 mmc_bus 总线系统。和其他驱动注册方式一致。
关键函数为:platform_driver_register() --> driver_register() --> bus_add_driver()
MMC设备注册
每个host均有调用入口,使用moduSD/SDIO/MMC 驱动是一种基于 SDMMC 和 SD SPI 主机驱动的协议级驱动程序,目前已支持 SD 存储器、SDIO 卡和 eMMC 芯片。
le_platform_driver()宏实现。
驱动入口函数中将注册 platform_driver 和 platform_device , name 均定义为 xxx_mmc 。根据驱动模型,最终会回调 xxx_mmc_driver 中的 probe() 函数: xxx_mmc_probe() 。
关键函数为: platform_device_add() --> device_add() --> bus_add_device() / bus_probe_device()
注册过程(瑞芯微MMC驱动源码)
设备启动时,首先向linux系统注册mmc_bus和sdio_bus两条总线,用来管理块设备和sdio接口类型的设备。同时注册mmc_host_class类
# core.c
subsys_initcall(mmc_init);
接着调用module_init向系统注册一条mmc_rpmb_bus总线、一个mmc块设备和mmc driver。
# block.c
module_init(mmc_blk_init);
最后调用module_platform_driver,把mmc controler注册到platform总线,同时扫描一次挂载到mmc控制器上的设备。
# meson-mx-sdio.c
module_platform_driver(mmc_pwrseq_emmc_driver);
mmc卡(mmc type card)协议相关操作
mmc_ops提供了部分和mmc卡协议相关的操作。
mmc_go_idle
发送CMD0指令,GO_IDLE_STATE
使mmc card进入idle state。
虽然进入到了Idle State,但是上电复位过程并不一定完成了,这主要靠读取OCR的busy位来判断,而流程归结为下一步。
mmc_send_op_cond
发送CMD1指令,SEND_OP_COND
这里会设置card的工作电压寄存器OCR,并且通过busy位(bit31)来判断card的上电复位过程是否完成,如果没有完成的话需要重复发送。
完成之后,mmc card进入ready state。
mmc_all_send_cid
这里会发送CMD2指令,ALL_SEND_CID
广播指令,使card回复对应的CID寄存器的值。在这里就相应获得了CID寄存器的值了,存储在cid中。
完成之后,MMC card会进入Identification State。
mmc_set_relative_addr
发送CMD3指令,SET_RELATIVE_ADDR
设置该mmc card的关联地址为card->rca,也就是0x0001
完成之后,该MMC card进入standby模式。
mmc_send_csd
发送CMD9指令,MMC_SEND_CSD
要求mmc card发送csd寄存器,存储到card->raw_csd中,也就是原始的csd寄存器的值。
此时mmc card还是处于standby state
mmc_select_card & mmc_deselect_cards
发送CMD7指令,SELECT/DESELECT CARD
选择或者断开指定的car成员或者sending-data state依次来进行数据的传输
mmc_get_ext_csd
发送CMD8指令,SEND_EXT_CSD
这里要求处于transfer state的card发送ext_csd寄存器,这里获取之后存放在ext_csd寄存器中
这里会使card进入sending-data state,完成之后又退出到transfer state。
mmc_switch
发送CMD6命令,MMC_SWITCH
用于设置ext_csd寄存器的某些bit
mmc_send_status
发送CMD13命令,MMC_SEND_STATUS
要求card发送自己当前的状态寄存器
mmc_send_cid
发送CMD10命令,MMC_SEND_CID
要求mmc card回复cid寄存器
mmc_card_sleepawake
发送CMD5命令,MMC_SLEEP_AWAKE
使card进入或者退出sleep state,由参数决定。关于sleep state是指card的一种状态,具体参考emmc 5.1协议。
DTS配置
参考瑞芯微RK3568,配置文件位于
ARM:arch/arm/boot/dts/ // 主要是芯片级的配置,无需修改
ARM64:arch/arm64/boot/dts/rockchip // 主要是板级相关的配置,可以根据实际需求修改
对应文件为
arch\arm64\boot\dts\rockchip\rk3568.dtsi
arch\arm68\boot\dts\rockchip\rk3568-pinctrl.dsti
arch\arm64\boot\dts\rockchip\rk3568-evb1-v10.dts
rk3568.dtsi
sdmmc0: mmc@fe2b0000 {
compatible = "rockchip,rk3568-dw-mshc", "rockchip,rk3288-dw-mshc";
reg = <0x0 0xfe2b0000 0x0 0x4000>;
interrupts = ;
clocks = <&cru HCLK_SDMMC0>, <&cru CLK_SDMMC0>,
<&cru SCLK_SDMMC0_DRV>, <&cru SCLK_SDMMC0_SAMPLE>;
clock-names = "biu", "ciu", "ciu-drive", "ciu-sample";
fifo-depth = <0x100>;
max-frequency = <150000000>;
resets = <&cru SRST_SDMMC0>;
reset-names = "reset";
status = "disabled";
};
参考资料
- Linux MMC 驱动子系统
- Linux设备驱动模型和sysfs文件系统
- LINUX MMC子系统分析之一 概述
- LINUX设备驱动模型分析之一 总体概念说明
- LINUX MMC子系统分析之二 MMC子系统驱动模型分析(包括总线、设备、驱动)
- LINUX设备驱动模型分析之二 总线(BUS)接口分析
- LINUX MMC子系统分析之三 MMC/SDIO总线接口分析
- LINUX设备驱动模型分析之三 驱动(DRIVER)接口分析
- LINUX MMC 子系统分析之六 MMC card添加流程分析
- Linux内核4.14版本——mmc core(4)——card相关模块(mmc type card)
- Rockchip RK3588 kernel dts解析之MMC_loitawu的博客-CSDN博客