erlang的send_after的时间管理
send_after时间轮管理
愚昧之人追赶时间之轮,聪慧之人乘坐时间之轮。 ----无名氏send_after时间管理
send_after可以实现在多少秒后发送一条消息给某个进程,但是这个erlang是如何判断时间到了呢?
在erlang的实现time.c文件中可以看到erlang是通过一个时间轮,可以想象成一个带有刻度的环形尺子。send_after通过不同的时间挂载到不同的刻度下,由于时间的总刻度是一定的,所以会有不同的时间挂载到相同的时间刻度下,比如总刻度为8,那么1跟9必然在相同刻度下,因为9%8==1,所以每一个挂载在刻度下的时间有一个count计数此时间是第几轮的时间,如果1是第一轮的话,9就是第二轮。当erlang虚拟机调度进程时就会处理时间轮结构,看看有没有到期的时间。
具体判断规则为:拿出上次记录的时间到这次时间中间的所有消息,对相应的时间进行判断,若时间的轮数小于当前轮数,则说明此时间已经到了,则把相应的消息发送到相应的进程。
如下图所示: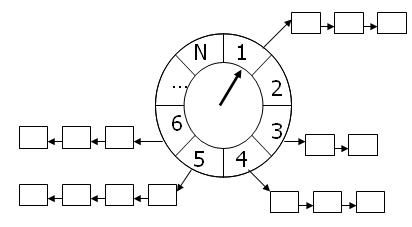
具体实现(time.c)
/*
** Timer entry:
*/
//timer的结构
typedef struct erl_timer {
struct erl_timer* next; /* next entry tiw slot or chain */
struct erl_timer* prev; /* prev entry tiw slot or chain */
Uint slot; /* slot in timer wheel */
Uint count; /* number of loops remaining */
int active; /* 1=activated, 0=deactivated */
/* called when timeout */
//当时间到的时候,会调用相应的timeout函数发送消息到对应的进程
void (*timeout)(void*);
/* called when cancel (may be NULL) */
void (*cancel)(void*);
void* arg; /* argument to timeout/cancel procs */
} ErlTimer;static void
insert_timer(ErlTimer* p, Uint t)
{
Uint tm;
Uint64 ticks;
/* The current slot (tiw_pos) in timing wheel is the next slot to be
* be processed. Hence no extra time tick is needed.
*
* (x + y - 1)/y is precisely the "number of bins" formula.
*/
ticks = (t + (TIW_ITIME - 1)) / TIW_ITIME;
/*
* Ticks must be a Uint64, or the addition may overflow here,
* resulting in an incorrect value for p->count below.
*/
ticks += do_time_update(); /* Add backlog of unprocessed time */
/* calculate slot */
tm = (ticks + tiw_pos) % TIW_SIZE; //计算刻度
p->slot = (Uint) tm;
p->count = (Uint) (ticks / TIW_SIZE);//计算第几轮
/* insert at head of list at slot */
//头插法,插入链表
p->next = tiw[tm];
p->prev = NULL;
if (p->next != NULL)
p->next->prev = p;
tiw[tm] = p;
/* insert min time */
if ((tiw_nto == 0) || ((tiw_min_ptr != NULL) && (ticks < tiw_min))) {
tiw_min = ticks;//记录最小的秒数
tiw_min_ptr = p;
}
if ((tiw_min_ptr == p) && (ticks > tiw_min)) {
/* some other timer might be 'min' now */
tiw_min = 0;
tiw_min_ptr = NULL;
}
tiw_nto++;//时间的timer个数
}//每个刻度(插槽)下的timer是一个双链表的结构
static void remove_timer(ErlTimer *p) {
/* first */
if (!p->prev) {
tiw[p->slot] = p->next;
if(p->next)
p->next->prev = NULL;
} else {
p->prev->next = p->next;
}
/* last */
if (!p->next) {
if (p->prev)
p->prev->next = NULL;
} else {
p->next->prev = p->prev;
}
p->next = NULL;
p->prev = NULL;
/* Make sure cancel callback isn't called */
p->active = 0;
tiw_nto--;
}void
erts_init_time(void)
{
int i, itime;
/* system dependent init; must be done before do_time_init()
if timer thread is enabled */
itime = erts_init_time_sup();
#ifdef TIW_ITIME_IS_CONSTANT
if (itime != TIW_ITIME) {
erl_exit(ERTS_ABORT_EXIT, "timer resolution mismatch %d != %d", itime, TIW_ITIME);
}
#else
tiw_itime = itime;
#endif
erts_smp_mtx_init(&tiw_lock, "timer_wheel");
//从这里可以看到一个事件轮是一个ErlTimer* 类型的数组 数组大小是65536(一般情况下)
tiw = (ErlTimer**) erts_alloc(ERTS_ALC_T_TIMER_WHEEL,
TIW_SIZE * sizeof(ErlTimer*));
for(i = 0; i < TIW_SIZE; i++)
tiw[i] = NULL;
do_time_init();
tiw_pos = tiw_nto = 0;
tiw_min_ptr = NULL;
tiw_min = 0;
}static ERTS_INLINE void bump_timer_internal(erts_short_time_t dt) /* PRE: tiw_lock is write-locked */
{
Uint keep_pos;
Uint count;
ErlTimer *p, **prev, *timeout_head, **timeout_tail;
Uint dtime = (Uint) dt;
/* no need to bump the position if there aren't any timeouts */
if (tiw_nto == 0) {
erts_smp_mtx_unlock(&tiw_lock);
return;
}
/* if do_time > TIW_SIZE we want to go around just once */
count = (Uint)(dtime / TIW_SIZE) + 1;//会遍历的轮数
keep_pos = (tiw_pos + dtime) % TIW_SIZE;//
if (dtime > TIW_SIZE) dtime = TIW_SIZE;//最多遍历一轮
timeout_head = NULL;
timeout_tail = &timeout_head;
while (dtime > 0) {
/* this is to decrease the counters with the right amount */
/* when dtime >= TIW_SIZE */
if (tiw_pos == keep_pos) count--;//过了一轮count自减
prev = &tiw[tiw_pos];//拿到当前毫秒刻度的所有timer
while ((p = *prev) != NULL) {
ASSERT( p != p->next);
if (p->count < count) { /* we have a timeout */ //time的轮数小于当前轮数,超时了。
/* remove min time */
if (tiw_min_ptr == p) {
tiw_min_ptr = NULL;
tiw_min = 0;
}
/* Remove from list */
remove_timer(p);//移除消息
*timeout_tail = p; /* Insert in timeout queue */ //头插法构成超时链表
timeout_tail = &p->next;
}
else {
/* no timeout, just decrease counter */
p->count -= count;//更新轮数
prev = &p->next;//下一条timer
}
}
tiw_pos = (tiw_pos + 1) % TIW_SIZE;//下一毫秒插槽(刻度)
dtime--;//毫秒自减
}
tiw_pos = keep_pos;
if (tiw_min_ptr)
tiw_min -= dt;
erts_smp_mtx_unlock(&tiw_lock);
/* Call timedout timers callbacks */
while (timeout_head) {
p = timeout_head;
timeout_head = p->next;
/* Here comes hairy use of the timer fields!
* They are reset without having the lock.
* It is assumed that no code but this will
* accesses any field until the ->timeout
* callback is called.
*/
p->next = NULL;
p->prev = NULL;
p->slot = 0;
(*p->timeout)(p->arg);
}
}一些注意点
- 一个时间轮的刻度大概是66秒,所以一个进程经过66秒就会遍历一次所有timer。
- 对于未来长时间的消息,在多次调用bump_timer_internal,会对消息进行多次遍历。
- 发送时使用头插法插入消息,超时时使用队列,插入到队列尾部,所以会造成消息逆序。
- 每一个虚拟机一个时间轮。(代码中可以看到初始化调用是在你erl_start函数)
疑问的地方
- 目前看代码,代码调用bump_timer_internal是在scheduler_wait和scheduler函数。那么为何只在这两个函数进行调用?如果时间过长就不能保证send_after的消息准时到达。