伺服电机堵转检测
一. 电流数据的分析
电机工作时的电流如下图:
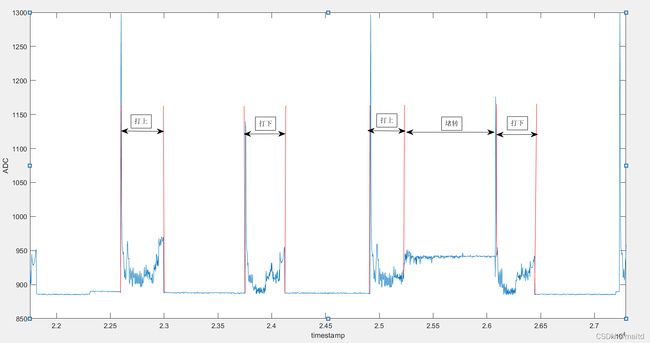
电机正常工作时,电机电流具有两个状态:正常旋转和堵转。
正常旋转时,电流在控制算法的作用下,一开始会有很快的上升,过程中电流受到控制算法的作用,没有平稳阶段。
堵转时,电机结束了控制算法,所以堵转时电流上升然后保持一段时间的平稳状态。
用电流曲线的斜率描述这一状态:开始斜率是正的,然后斜率变为0。所以可以计算电流曲线的斜率来识别电机是否处于堵转状态。
二. 检测原理
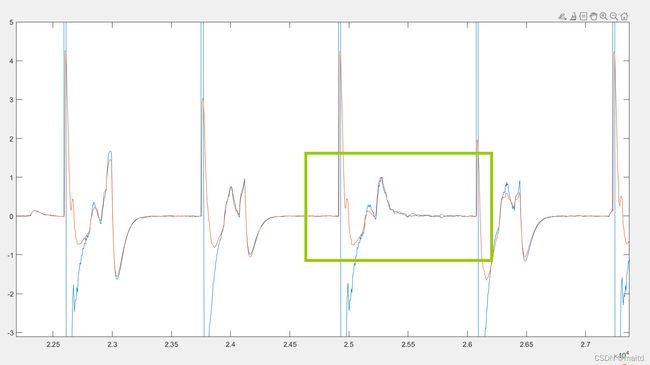
上图中黄色曲线为matlab计算得出的电流曲线斜率,蓝色曲线为单片机计算得出的斜率。
实际上由于所使用的算法在长时间运行下存在过拟合,所以在实际中,在电机开始工作时对算法的参数做重新的初始化,导致单片机一开始的计算结果波动较大。
算法的基本流程:
1.检测斜率是否接近于0,如果接近于0说明电流此时处于平稳的状态。
2.检测此时斜率的均值,均值是此时刻及之前40个时刻的斜率值得均值。若此时刻均值大于0.3说明,在过去的40个时刻电流是上升状态。
3.若此刻斜率均值大于0.3,检测此时刻后300ms内斜率是否会小于-0.2。若存在这种情况说明电流又快速下降,手指并未处在堵转状态。
4.没有小于-0.2的情况,说明电机此时处于堵转状态。
三. 斜率计算实现
考虑到单片机的性能限制,使用了递推最小二乘方法来递推电流曲线的斜率,并使用队列来保存40个时刻的斜率数据用来递推均值,减少运算量。为了能尽快的使计算结果跟踪电流曲线的变化,在开始的40个计算周期内使用带遗忘因子的递推最小二乘,之后使用有限数据窗+遗忘因子的方式计算。数据窗的长度即参与计算的数据个数为40个。
算法原理可参考以下博客
https://blog.csdn.net/qq_33243369/article/details/102713303
四. 实际效果
可以在发生过流后70ms左右检测到过流。
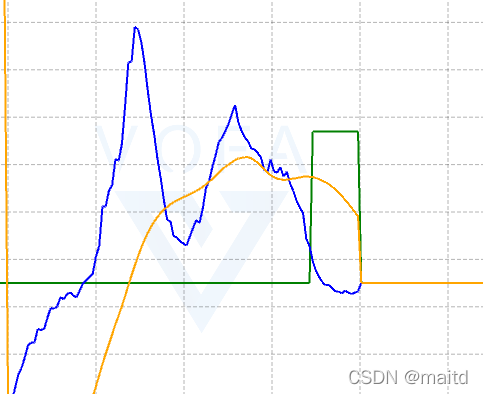
图中蓝色曲线是计算得出的电流斜率。黄色曲线为电流斜率的递推均值,绿色曲线代表有无检测出过流。
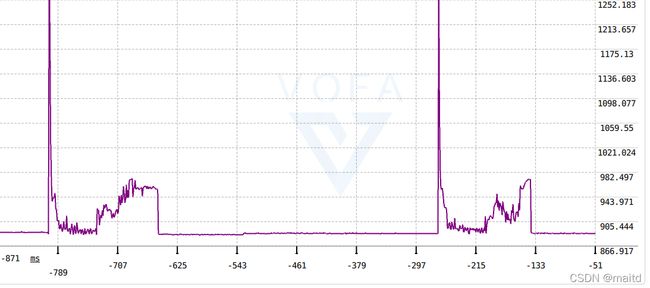
在检测出过流后,将手指电机占空比设置为0.上图第二段曲线是手指正常打下的电流曲线,第一段曲线是手指打下后有堵转,可以看到堵转后70ms内电流回复了正常值。
五.代码实现
least_squares.h
#ifndef _LEAST_SQUARES_H
#define _LEAST_SQUARES_H
#include "queue.h"
typedef struct
{
float P[4];
float L[2];
float Q[4];
float lam_p;
float lamp;
QUEUE K0_q;
QUEUE K1_q;
float K[2];
float lam;
QUEUE cur;
float last_mean_cur;
// unsigned int i;
uint32_t phi;
float mean_k;
float k_sum;
float start_time;
float check_f;
uint8_t overcur;
float cur_sum;
float mean_cur;
} least_squares_paras_t;
void least_squares_init(void);
void least_squares_porcess(float cur);
#endif
least_squares.c
#include "least_squares.h"
#include "math.h"
least_squares_paras_t least_squares_paras;
extern robot_finger_module_t robot_finger_module;
//init paras
void least_squares_init(void)
{
least_squares_paras.lam = 0.9;
least_squares_paras.lam_p = 67.6550;
least_squares_paras.lamp = 0.0148;
least_squares_paras.phi = 1;
least_squares_paras.k_sum=0;
least_squares_paras.mean_k=0;
least_squares_paras.P[0] = 1000000;
least_squares_paras.P[1] = 0;
least_squares_paras.P[2] = 0;
least_squares_paras.P[3] = 1000000;
least_squares_paras.K[0] = 0;
least_squares_paras.K[1] = 0;
least_squares_paras.check_f = 0;
least_squares_paras.overcur=0;
CreateQueue(&least_squares_paras.cur,40);
CreateQueue(&least_squares_paras.K0_q,40);
CreateQueue(&least_squares_paras.K1_q,40);
}
void least_squares_porcess(float cur)
{
//time counter
least_squares_paras.phi++;
//queue is not full, use forgetting factor
if(!FullQueue(&least_squares_paras.cur))
{
Enqueue(&least_squares_paras.cur,cur);
least_squares_paras.cur_sum+=cur;
least_squares_paras.mean_cur = least_squares_paras.cur_sum/least_squares_paras.cur.rear;
//Extract the reused process value and calculate it separately
float res1 = least_squares_paras.lam + least_squares_paras.phi*least_squares_paras.phi*least_squares_paras.P[0]
+ least_squares_paras.phi*least_squares_paras.P[1]
+ least_squares_paras.phi*least_squares_paras.P[2]
+ least_squares_paras.P[3];
//calculate L
least_squares_paras.L[0] = (least_squares_paras.P[0]*least_squares_paras.phi+least_squares_paras.P[1])/res1;
least_squares_paras.L[1] = (least_squares_paras.P[2]*least_squares_paras.phi+least_squares_paras.P[3])/res1;
//calculate P
float P_t[4] = {least_squares_paras.P[0],least_squares_paras.P[1],least_squares_paras.P[2],least_squares_paras.P[3]};
least_squares_paras.P[0] = (P_t[0]*(1-least_squares_paras.L[0]*least_squares_paras.phi)
- least_squares_paras.L[0]*P_t[2])/least_squares_paras.lam;
least_squares_paras.P[1] = (P_t[1]*(1-least_squares_paras.L[0]*least_squares_paras.phi)
- least_squares_paras.L[0]*P_t[3])/least_squares_paras.lam;
least_squares_paras.P[2] = (P_t[2]*(1-least_squares_paras.L[1])
- least_squares_paras.L[1]*P_t[0]*least_squares_paras.phi)/least_squares_paras.lam;
least_squares_paras.P[3] = (P_t[3]*(1-least_squares_paras.L[1])
- least_squares_paras.L[1]*P_t[1]*least_squares_paras.phi)/least_squares_paras.lam;
//calculate slope
float K_o[2]={least_squares_paras.K[0] ,least_squares_paras.K[1]};
least_squares_paras.K[0] = least_squares_paras.K[0]
+ least_squares_paras.L[0]*(cur - least_squares_paras.phi*K_o[0]-K_o[1]);
least_squares_paras.K[1] = least_squares_paras.K[1]
+ least_squares_paras.L[1]*(cur - least_squares_paras.phi*K_o[0]-K_o[1]);
Enqueue(&least_squares_paras.K0_q,least_squares_paras.K[0]);
Enqueue(&least_squares_paras.K1_q,least_squares_paras.K[1]);
least_squares_paras.k_sum+=least_squares_paras.K[0];
least_squares_paras.mean_k = least_squares_paras.k_sum/least_squares_paras.K0_q.rear;
}
else //queue is full,use Limited data window and forgetting factor
{
//current before 40 cycles
float cur_p =0;
//the present time
float t = least_squares_paras.phi;
//time before 40 cycles
float t_p = least_squares_paras.phi-40;
//Extract the reused process value and calculate it separately
Dequeue(&least_squares_paras.cur,&cur_p);
float p_t[10];
uint8_t p_cnt = 0;
for(int i=0;i<4;i++)
{
for(int j=i;j<4;j++)
{
p_t[p_cnt]=least_squares_paras.P[i]*least_squares_paras.P[j];
p_cnt++;
}
}
float res = least_squares_paras.lam+least_squares_paras.P[3]
+t*(least_squares_paras.P[2]+t*least_squares_paras.P[0]+least_squares_paras.P[1]);
//calculate Q
least_squares_paras.Q[0] = (least_squares_paras.P[0]-(p_t[5]+t*p_t[2]+t*p_t[1]+t*t*p_t[0])/res)/least_squares_paras.lam;
least_squares_paras.Q[1] = (least_squares_paras.P[1]-(p_t[6]+t*p_t[3]+t*p_t[4]+t*t*p_t[1])/res)/least_squares_paras.lam;
least_squares_paras.Q[2] = (least_squares_paras.P[2]-(p_t[8]+t*p_t[7]+t*p_t[3]+t*t*p_t[2])/res)/least_squares_paras.lam;
least_squares_paras.Q[3] = (least_squares_paras.P[3]-(p_t[9]+t*p_t[8]+t*p_t[6]+t*t*p_t[5])/res)/least_squares_paras.lam;
//Extract the reused process value and calculate it separately
float q_t[10];
uint8_t q_cnt = 0;
for(int i=0;i<4;i++)
{
for(int j=i;j<4;j++)
{
q_t[q_cnt]=least_squares_paras.Q[i]*least_squares_paras.Q[j];
q_cnt++;
}
}
res = least_squares_paras.Q[3]-least_squares_paras.lam_p+t_p*(least_squares_paras.Q[2]+t_p*least_squares_paras.Q[0]+least_squares_paras.Q[1]);
//calculate Q
least_squares_paras.P[0] = least_squares_paras.Q[0]-(q_t[5]+t_p*q_t[2]+t_p*q_t[1]+t_p*t_p*q_t[0])/res;
least_squares_paras.P[1] = least_squares_paras.Q[1]-(q_t[6]+t_p*q_t[3]+t_p*q_t[4]+t_p*t_p*q_t[1])/res;
least_squares_paras.P[2] = least_squares_paras.Q[2]-(q_t[8]+t_p*q_t[7]+t_p*q_t[3]+t_p*t_p*q_t[2])/res;
least_squares_paras.P[3] = least_squares_paras.Q[3]-(q_t[9]+t_p*q_t[8]+t_p*q_t[6]+t_p*t_p*q_t[5])/res;
//calculate slope
float K_o[2]={least_squares_paras.K[0] ,least_squares_paras.K[1]};
float res1 = K_o[1]-cur+t*K_o[0];
float res2 = K_o[1]-cur_p+t_p*K_o[0];
least_squares_paras.K[0] = K_o[0]-(least_squares_paras.P[1]+t*least_squares_paras.P[0])*res1
+(least_squares_paras.lamp*least_squares_paras.P[1]+least_squares_paras.lamp*least_squares_paras.P[0]*t_p)*res2;
least_squares_paras.K[1] = K_o[1]-(least_squares_paras.P[3]+t*least_squares_paras.P[2])*res1
+(least_squares_paras.lamp*least_squares_paras.P[3]+least_squares_paras.lamp*least_squares_paras.P[2]*t_p)*res2;
float K_p[2];
Dequeue(&least_squares_paras.K0_q,&K_p[0]);
Dequeue(&least_squares_paras.K1_q,&K_p[1]);
least_squares_paras.k_sum=least_squares_paras.k_sum-K_p[0]+least_squares_paras.K[0];
least_squares_paras.mean_k = least_squares_paras.k_sum/least_squares_paras.K0_q.maxsize;
Enqueue(&least_squares_paras.K0_q,least_squares_paras.K[0]);
Enqueue(&least_squares_paras.K1_q,least_squares_paras.K[1]);
Enqueue(&least_squares_paras.cur,cur);
}
if(least_squares_paras.check_f)
{
uint32_t time = HAL_GetTick();
if(time>least_squares_paras.start_time+150&&time<least_squares_paras.start_time+450)
{
if(least_squares_paras.K[0]>0&&least_squares_paras.K[0]<0.2&&least_squares_paras.mean_k>0.35)
{
least_squares_paras.overcur=1;
}
if(least_squares_paras.K[0]<-0.2)
{
least_squares_paras.overcur=0;
}
}
else if(time>least_squares_paras.start_time+450&&time<least_squares_paras.start_time+800)
{
//least_squares_paras.check_f=0;
ClearQuene(&least_squares_paras.cur);
ClearQuene(&least_squares_paras.K0_q);
ClearQuene(&least_squares_paras.K1_q);
least_squares_paras.phi = 1;
least_squares_paras.k_sum=0;
least_squares_paras.mean_k=0;
least_squares_paras.P[0] = 100;
least_squares_paras.P[1] = 0;
least_squares_paras.P[2] = 0;
least_squares_paras.P[3] = 100;
least_squares_paras.K[0] = 0;
least_squares_paras.K[1] = 0;
least_squares_paras.mean_k = 0;
if(least_squares_paras.overcur)
{
//检测出过流,执行相应的保护操作
}
least_squares_paras.overcur=0;
}
else if(time>least_squares_paras.start_time+800)
{
least_squares_paras.check_f=0;
}
}
}
queue.h
#ifndef __QUEUE_H_
#define __QUEUE_H_
typedef struct queue
{
float *pBase;
int front;
int rear;
int maxsize;
}QUEUE,*PQUEUE;
void ClearQuene(PQUEUE Q);
void CreateQueue(PQUEUE Q,int maxsize);
void TraverseQueue(PQUEUE Q);
int FullQueue(PQUEUE Q);
int EmptyQueue(PQUEUE Q);
int Enqueue(PQUEUE Q, float val);
int Dequeue(PQUEUE Q, float *val);
#endif
queue.c
#include