高效学习传感器|霍尔式传感器

01、霍尔式传感器的工作原理
1●霍尔效应
霍尔式传感器的物理基础是霍尔效应。如图1所示,在一块长度为l、宽度为b、厚度为d的长方体导电板上,左、右、前、后侧面都安装上电极。在长度方向上通入电流I,在厚度方向施加磁感应强度为B的磁场。

■ 图1 霍尔效应示意图
导电板中的自由电子沿电流反方向作定向移动,平均速度为v。在磁场的作用下,电子受到洛伦兹力的作用。每个电子受到洛伦兹力fL的大小为

其中,e是一个电子的电荷量,e=1.6×10-19C。根据左手定则,可以判断出洛伦兹力fL的方向由外向里。
电子除了作定向移动外,还在洛伦兹力的作用下向里飘移,结果在导电板的里表面积累了电子,在外表面积累了正电荷,这样,导电板中就形成了附加电场EH,称为霍尔电场。
在霍尔电场的作用下,电子将受到一个与洛仑兹力方向相反的电场力
的作用,这个力阻止电荷的继续积聚。当导电板中电子积累达到动态平衡时,电荷不再增加,电子所受的洛仑兹力和电场力大小相等,即
化简得

这时,在导电板的外表面与里表面就产生电势差,大小为
把公式带入得:
当载流导体或半导体处在与电流垂直的磁场时,在其与电流方向、磁场方向都垂直的两端将产生电位差,这一现象称为霍尔效应,霍尔效应产生的电动势称为霍尔电动势,长方体导电板称为霍尔片。霍尔效应是运动电荷受磁场中洛伦兹力作用的结果,基于霍尔效应的传感器称为霍尔式传感器。
由以上公式可见,霍尔电动势UH与磁感应强度B成线性关系,因此,通过测量UH可以得到B。这就是霍尔传感器的工作原理。
1879年,美国物理学家霍尔(Edwin H. Hall,1855-1938)在研究金属导电机制时发现了霍尔效应,但是,由于金属材料的霍尔效应太弱,霍尔效应没有得到应用。随着半导体技术、材料科学和电子技术的发展,使用半导体材料制作的霍尔片具有明显的霍尔效应,并且出现了高强度的恒定磁体以及工作于小电压输出的信号调节电路,霍尔式传感器迅速发展起来了。霍尔式传感器用于测量电磁、电力、加速度、振动等物理量,应用非常广泛。例如,汽车上就使用了多种霍尔式传感器。
2●霍尔灵敏度
设导电板中自由电子浓度为n,电子定向运动的平均速度为v,则电流的大小为
霍尔片在单位控制电流和单位磁感应强度时产生的霍尔电动势,称为霍尔灵敏度,记为KH,即

代入公式,得

从公式可见,霍尔灵敏度与霍尔片的厚度d成反比,因此,常把霍尔片做成薄片状,其厚度一般为0.1~0.2mm。另外,霍尔灵敏度还与自由电子浓度n成反比。因为金属的自由电子浓度过高,所以,金属不适合用于制作霍尔片。
在使用霍尔传感器进行测量时,常用恒压源提供激励电流,电源电压是一个常量,U=El。设霍尔片材料的迁移率为μ,则电子在电场中的平均迁移速度为v=μE,从而有

结合以上公式可得:

从以上公式可见,霍尔灵敏度与载流子的迁移率µ成正比。因为电子迁移率远大于空穴,所以,常用N型半导体材料制作霍尔片。
3●霍尔元件
霍尔元件的结构如图2所示,由霍尔片、4根引线和壳体组成。在霍尔片长度方向的两侧焊有两根控制电流引线“输入1”和“输入2”,它们在薄片上的焊点称为激励电极。在霍尔片宽度方向的两侧焊有两根输出引线“输出1”和“输出2”,它们在薄片上的焊点称为霍尔电极。霍尔元件的壳体用非导磁金属、陶瓷或环氧树脂封装而成。

■ 图2 霍尔元件的结构
霍尔元件的外形和符号如图3所示,其中,a、b是激励电极,c、d是霍尔电极。

■ 图3 霍尔元件的外形和符号
4●霍尔元件的基本特性
(1)输出特性
某些霍尔元件在恒流源的驱动下,其霍尔电动势UH与磁感应强度B成线性关系,输出为模拟量,如图4(1)所示。具有线性特性的霍尔元件称为霍尔线性器件。磁通计中的传感器大多采用具有线性特性的霍尔元件。
有些霍尔元件在恒压源的驱动下,其霍尔电动势UH在一定区域内随B的增加迅速增加,如图4(2)所示。通过数据处理,可以使输出转化为数字量,使其具有开关特性,相应的霍尔元件称为霍尔开关器件。开关特性随磁体本身材料及形状的不同而不同,低磁场时,磁通饱和。对直流无刷电动机的控制,一般采用霍尔开关器件。
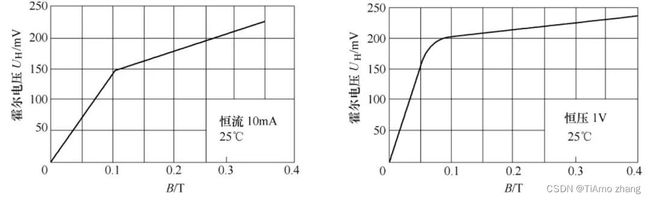
(1)恒流源驱动 (2)恒压源驱动
■ 图4 霍尔元件的输出特性
(2)负载特性
前面叙述的霍尔电动势的线性特性,是在霍尔电极之间为开路,或测量仪表阻抗为无穷大的情况下得到的。当霍尔电极之间接有负载时,就有电流流过内阻,从而产生压降,因此,实际的霍尔电动势将比理论值略小。
(3)不等位电动势
以上公式可以改写为
从公式可见,当未加磁场时,霍尔电动势UH应该为0。但是,在实际使用中,由于霍尔电极安装位置不对称或不在同一个等电位上,半导体材料不均匀造成电阻率不均匀,霍尔片几何尺寸不对称,或者激励电极接触不良造成激励电流分配不均匀等原因,霍尔元件存在一定的输出电压,称为不等位电动势。
(4)温度特性
半导体材料受温度影响比较大,因此,用半导体材料制成的霍尔元件也会受温度的影响。温度将影响霍尔元件的霍尔电动势、霍尔灵敏度、输入阻抗和输出阻抗等参数。
5●霍尔元件的误差补偿
(1)不等位电动势的补偿
不等位电动势与霍尔电动势具有相同的数量级,有时甚至超过霍尔电动势,因此,必须采取措施进行消除。不等位电动势的补偿电路如图5所示。
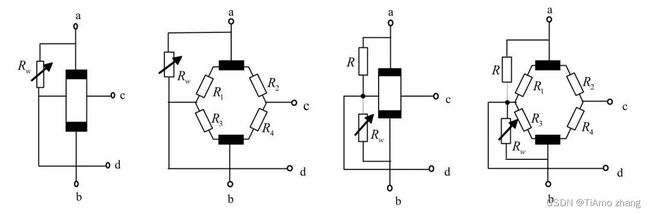
(1)不对称补偿 (2)对称补偿
■ 图5 不等位电动势的补偿电路
霍尔元件可以等效为一个四臂电桥,当存在不等位电动势时,说明电桥不平衡,四个电阻值不相等。为了使电桥平衡,可以采用两种补偿方法。第一种方法是在电桥阻值较大的桥臂上并联电阻,称为不对称补偿,这种方法比较简单。第二种方法是在电桥两个桥臂上同时并联电阻,称为对称补偿,补偿后的温度稳定性较好。
采用补偿电阻的方法来消除霍尔元件的不等位电势,补偿电路比较简单,但是,这种方法会影响霍尔元件的霍尔灵敏度和精度。
(2)温度误差补偿
温度变化会引起霍尔元件输入电阻的变化,从而引起激励电流的变化,结果导致霍尔电动势的变化。如果采用恒流源作为激励电流,可以减小温度误差。但是,温度变化也会引起霍尔灵敏度的变化。当温度发生变化时,霍尔灵敏度与温度变化的关系为

其中,KH0为温度T0时的灵敏度,ΔT=T-T0为温度的增量,γ为霍尔灵敏度的温度系数。此时,霍尔电压将变为
当温度发生变化时,磁场强度不随温度的变化而变化。因此,为了保持UH不变,可以适当减小激励电流I的值。为此,在霍尔元件的输入回路中并联一个电阻,起到分流的作用。温度误差的补偿电路如图6所示。

■ 图6 温度误差的补偿电路
补偿电阻值的计算公式为

其中,α是UH的温度系数,β是电阻温度系数,RIN是霍尔元件的输入电阻。对于一种型号的霍尔元件,可以通过技术手册,从其参数表中查出α、β和RIN的值。