树莓派基础之外设开发编程
外设开发篇
- 一、树莓派外设开发接口
- 二、树莓派wiringPi库
- 三、树莓派控制继电器
- 四、继电器组硬件控制开发
- 五、超声波模块介绍
- 六、串口通信协议概述
- 七、树莓派和语音模块的综合应用
一、树莓派外设开发接口
树莓派的接口
对主控芯片来说有:
IO口(输入输出口):input output
Input:人体,烟雾,火焰,震动
Output:继电器,蜂鸣器
PWM(增强性IO口):电机调速,灯光调明亮度
其他串口:
uart,IIC,SPI,IIS
其他特定硬件接口:
flash
还有像树莓派一样要跑操作系统的芯片:
Nanopi:linux
S3c2410 2440 6410
Tiny210 tiny4412
海思方案,瑞芯微方案,移远方案
带有操作系统的芯片一般都会讲到驱动
不带操作系统的芯片:
C51,STM32,Arduino,WemosD1:没用OS(linux)
二、树莓派wiringPi库
1)树莓派的wiringPi库:
wiringPi库就好比 linux的动态库.so,静态库.a
也好比C语言里面的include
wiringPi库里面的API就好比include
2)wiringPi库不是树莓派自带的,是特定平台,特定功能的接口库。也就是别人已经给你封装好了,直接调用库里面的API就行,记得编译的时候要带 -lwiringPi
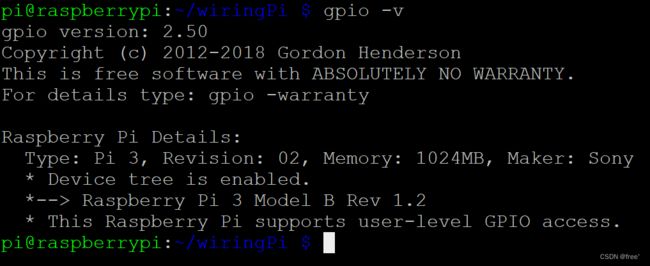
3)检查一下树莓派是否有下载这个wiringPi库:
gpio -v
4)硬件初始化,wiringPiSetup函数:
#include
5)树莓派wiringPi库参考博文
三、树莓派控制继电器
1)先查看下树莓派板上信息:
gpio readall

2)继电器的接口有三个,GND,IN,VCC
它的驱动电压是3.3v
所以正极(VCC) 接树莓派的3.3v
接地(GND) 接树莓派的0v
信号传输(IN)接 gpio口
接好后写代码:
#include运行结果可以:

四、继电器组硬件控制开发
1)树莓派和继电器组的接线:
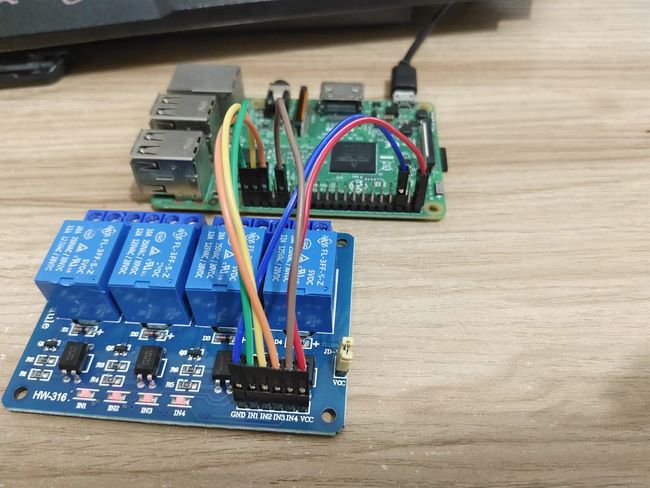
VCC正极接 5V
GND接地接 0V
IN1-IN4(信号) 接 GPIO.29 - GPIO.26
2)写代码测试下:
#include运行结果正常:

五、超声波模块介绍
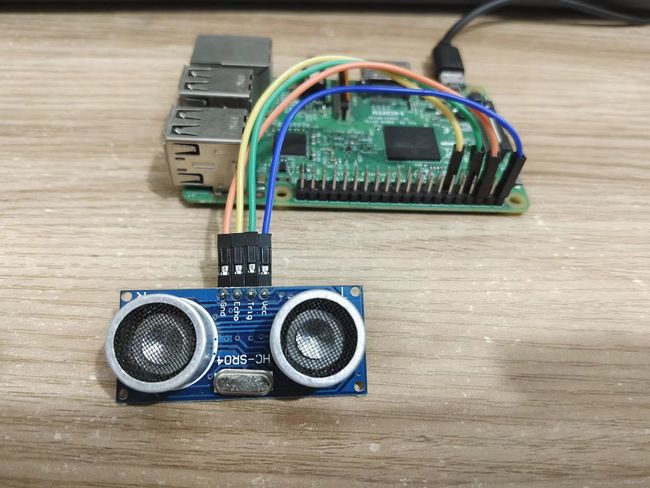
超声波传感器模块上通常有两个超声波元器件,一个用于发射,一个用于接收。电路板上有4个引脚:VCC(正极),Trig(触发),Echo(回应),GND(接地),主要参数:
工作电压与电流:5V,15mA
感测距离:2-400cm
感测角度:不大于15°
被测物的面积不要小于50cm²,并且尽量平整
具备温度补偿电路
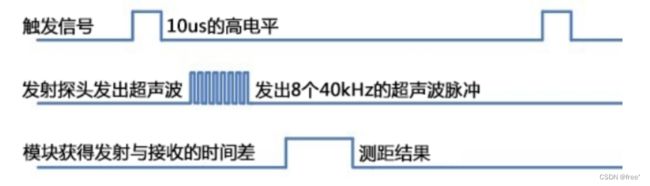
在超声波模块的触发脚位输入10微秒以上的高电位,即可发射超声波,发射超声波之后,与接收到传回的超声波之前,“脚位” 呈现高电位。因此,程序可从 “响应” 脚位的高电位脉冲持续时间,换算出被测物的距离。
参考博文
写代码前,想了解下需要用到的函数:
1)pinmode
void pinMode (int pin, int mode)
pin:配置的引脚
mode:指定引脚的IO模式
可取的值:INPUT、OUTPUT、PWM_OUTPUT,GPIO_CLOCK
作用:配置引脚的IO模式
注意:
只有wiringPi 引脚编号下的1脚(BCM下的18脚) 支持PWM输出
只有wiringPi编号下的7(BCM下的4号)支持GPIO_CLOCK输出
2)digitalWrite
void digitalWrite (int pin, int value)
pin:控制的引脚
value:引脚输出的电平值。
可取的值:HIGH,LOW分别代表高低电平
让对一个已近配置为输出模式的 引脚 输出指定的电平信号
3)digitalRead
int digitalRead (int pin)
pin:读取的引脚
返回:引脚上的电平,可以是LOW HIGH 之一
读取一个引脚的电平值 LOW HIGH ,返回
返回值也可以是1 / 0(当输入信号电压在0~1.16 V时该函数返回0,当输入信号在1.83~3.3 V时返回1。如果输入电压在1.16~1.83 V之间不确定会返回0还是1。)
4)delayMicroseconds
delayMicroseconds (unsigned int howLong)
将线程暂停指定的微秒数(1000微妙=1毫秒=0.001s),因为Linux是多线程的,所以实际暂停的秒数可能比设置的更多一些
5)gettimeofday
gettimeofday(struct timeval *, struct timezone *);
这个函数函数返回的是1970年0:00:00到现在经过的秒数,函数的正常传入时需要用到两个参数。功能是得到当前时间和时区,分别写到tv和tz中,如果tz为NULL则不向tz写入。
6)struct timeval结构体
#include 这个结构体也是linux内核中的,直接调用就好了,接的包含头文件。tv_sec为Epoch到创建struct timeval时的秒数,tv_usec为微秒数,即秒后面的零头。
7)代码:
#include 运行结果:

根据返回的秒数计算出微秒数
start = tv1.tv_sec * 1000000 + tv1.tv_usec;
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
我们知道 timeval结构体中含有两个变量,tv_sec表示的是秒数,1秒=1000000微妙,第二个参数tv_usec表示的就是微秒数,所以通过这两个式子我们就求出了开始和结束时的微秒数,然后做差即可得到超声波传递所使用的时间
根据时间计算距离
(stop - start) / 1000000 * 34000 / 2
因为stop和start原本表示的微妙,所以做差之后处1000000换算回是多少秒。因为声音在物质中的传播受到物质材质的影响,这里我们暂且不考虑介质的种类,默认为声音是在空气中传播,所以取声音的速度为340m/s=34000cm/s,因为超声波测距的误差较小的范围200-300cm,所以我们这里计算速度时用cm表示。
六、串口通信协议概述
1.串口通信
a)串口通信适用于多机通信
b)串口通信是通信方式属于全双工的(两个人互相骂)
c)串口通信关心的是数据格式和波特率
数据格式:数据位,停止位,奇偶效验位
2.初次使用树莓派串口编程,需要配置:
a)修改cmdline.text文件
sudo vi /boot/cmdline.txt
b)进入后修改删除红色括号的内容:
![]()
2.串口通信编程:
因为Linux一切皆文件,所以串口也是以文件的方式存放在树莓派中,所以我们调用串口通信的函数要包含头文件include
串口通信的函数有很多,我们实现简单的串口通信编程,要用到以下函数:
1)
int serialOpen (char *device, int baud)
device:串口的地址,在Linux中就是设备所在的目录。
默认一般是"/dev/ttyAMA0",我的是这样的。
baud:波特率
返回:正常返回文件描述符,否则返回-1失败。
功能:打开并初始串口
2)
void serialClose (int fd)
fd:文件描述符
功能:关闭fd关联的串口
3)
int serialDataAvail (int fd)
fd:文件描述符
返回:串口缓存中已经接收的,可读取的字节数,-1代表错误
功能:获取串口缓存中可用的字节数。
4)
void serialPuts (int fd, char *s)
fd:文件描述符
s:发送的字符串,字符串要以’\0’结尾
功能:发送一个字符串到串口
5)
int serialGetchar (int fd)
fd:文件描述符
返回:读取到的字符
功能:从串口读取一个字节数据返回。
如果串口缓存中没有可用的数据,则会等待10秒,如果10后还有没,返回-1
所以,在读取前,做好通过serialDataAvail判断下。
6)
void serialPutchar (int fd, unsigned char c)
fd:文件描述符
c:要发送的数据
功能:发送一个字节的数据到串口
7)
size_t read(int fd,void * buf ,size_t count);
fd:文件描述符
buf:接受的数据缓存的数组
count:接收的字节数.
返回:实际读取的字符数。
这个是Linux下的标准IO库函数,需要包含头文件#include
当要接收的数据量过大时,wiringPi建议使用这个函数。
8)
size_t write (int fd,const void * buf,size_t count)
fd:文件描述符
buf:需要发送的数据缓存数组
count:发送buf中的前count个字节数据
返回:实际写入的字符数,错误返回-1
这个是Linux下的标准IO库函数,需要包含头文件#include
当要发送到的数据量过大时,wiringPi建议使用这个函数。
9)简单测试下:
#include运行结果:

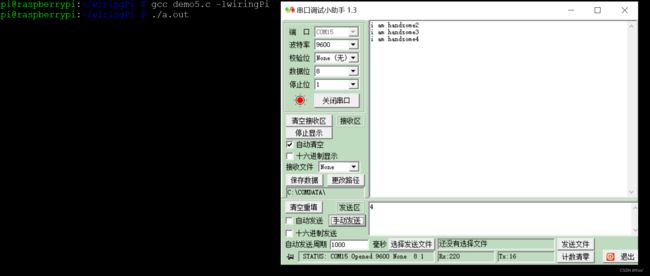
10)
#include运行结果:
七、树莓派和语音模块的综合应用
1)语音模块自身有源码,上次根据需求我们改了一些代码,实现的功能是当我们说开灯,语音模块识别后会往串口打印出相应的数据。
那么我们把语音模块连接树莓派,树莓派打开串口功能,当我们去给语音模块收到数据的时候,语音模块就会往树莓派的串口输入收到的数据,我们就可以通过树莓派串口打印出相应的数据。
2)树莓派和语音模块接线:
树莓派的TXD 接 语音模块的RXD
树莓派的RXD 接 语音模块的 TXD
树莓派的0V 接 语音模块的GND
树莓派的5v 接语音模块的5v
3)代码编程:
#include