计算几何算法模板
文章目录
-
-
-
- 1. 二维几何
-
- 1.1常用函数模板
- 1.2 距离转换
- 1.3 Pick定理
- 1.4 多边形
-
- 1.4.1三角形
- 1.5 极角序
- 1.6 二维凸包
- 1.7 半平面交
- 1.8 最小圆覆盖
- 1.9 最小矩形覆盖
- 1.10 旋转卡壳
- 1.11 三角剖分
- 1.12 扫描线
-
- 求三角形并的面积
- 1.13 自适应辛普森积分
-
- 求圆的的并的面积
- 2. 三维计算几何
-
- 2.1 三维凸包
-
-
1. 二维几何
1.1常用函数模板
const double eps = 1e-8;
const double pi = acos(-1);
typedef pair<double, double> PDD;
#define x first
#define y second
struct Line
{
PDD st, ed; // 存起点和终点
}lines[maxn];
int sign(double x) // 判断正负
{
if(fabs(x) < eps) return 0;
if(x < 0) return -1;
return 1;
}
int dcmp(double x, double y) // 浮点数比较大小
{
if(fabs(x - y) < eps) return 0;
if(x < y) return -1;
return 1;
}
PDD operator-(PDD a, PDD b) // 实现减法
{
return {a.x - b.x, a.y - b.y};
}
PDD operator+ (PDD a, PDD b) // 实现加法
{
return {a.x + b.x, a.y + b.y};
}
PDD operator* (PDD a, double t) // 向量乘系数
{
return {a.x * t, a.y * t};
}
double operator*(PDD a, PDD b) // 点积
{
return {a.x * b.x + a.y * b.y};
}
PDD operator/ (PDD a, double b) // 实现除法
{
return {a.x / b, a.y / b};
}
double dot(double x1, double y1, double x2, double y2) // 求点积
{
return x1 * x2 + y1 * y2;
}
double cross(double x1, double y1, double x2, double y2) // 求叉积
{
return x1 * y2 - x2 * y1;
}
double cross(PDD a, PDD b)
{
return a.x * b.y - a.y * b.x;
}
double area(PDD a, PDD b, PDD c) // 求面积
{
return cross(b - a, c - a);
}
double get_length(PDD a) // 取模
{
return sqrt(dot(a.x, a.y, a.x, a.y));
}
double get_angle(PDD a, PDD b) // 计算向量夹角
{
return acos(a * b / get_length(a) / get_length(b));
}
double project(PDD a, PDD b, PDD c) // 求ac在ab上的投影长度
{
return (b - a) * (c - a) / get_length(b - a);
}
PDD norm(PDD a) // 求单位向量
{
return a / get_length(a);
}
PDD rotate(PDD a, double b) // 绕原点逆时针旋转b
{
return {a.x * cos(b) + a.y * sin(b), -a.x * sin(b) + a.y * cos(b)};
}
PDD get_line_intersection(PDD p, PDD v, PDD q, PDD w) // 求两直线交点
{
auto u = p - q;
double t = cross(w, u) / cross(v, w);
return {p.x + v.x * t, p.y + v.y * t};
}
PDD get_line_intersection(Line a, Line b) // 求两直线交点
{
return get_line_intersection(a.st, a.ed - a.st, b.st, b.ed - b.st);
}
double distance_to_line(PDD p, PDD a, PDD b) // 点p到直线ab的距离
{
auto v1 = b - a, v2 = p - a;
return fabs(cross(v1, v2) / get_length(v1));
}
//判断b 和 c 的交点是否在直线a右侧
bool on_right(Line a, Line b, Line c)
{
auto o = get_line_intersection(b, c);
return sign(area(a.st, a.ed, o)) <= 0;
}
bool on_segment(PDD p, PDD a, PDD b) // 判断点p是否在线段ab上
{
// 首先,三点共线,然后点积小于等于0
return !sign((p - a) * (p - b)) && sign((p - a) & (p - b)) <= 0;
}
double distance_to_segment(PDD p, PDD a, PDD b) // 点p到线段ab的距离
{
if(a == b) return get_length(p - a);
auto v1 = b - a, v2 = p - a, v3 = p - b;
if(sign(v1 * v2) < 0) return get_length(v2);
if(sign(v1 * v3) < 0) return get_length(v3);
return distance_to_line(p, a, b);
}
// 求直线和圆的交点,存在pa和pb中,利用向量求法
double get_line_circle_intersection(PDD a, PDD b, PDD &pa, PDD &pb)
{
auto e = get_line_intersection(a, b - a, r, rotate(b - a, pi / 2));
auto min_d = get_dist(r, e);
if(!on_segment(e, a, b)) min_d = min(get_dist(r, a), get_dist(r, b));
if(dcmp(R, min_d) <= 0) return min_d;
auto len = sqrt(R * R - get_dist(r, e) * get_dist(r, e));
pa = e + norm(a - b) * len;
pb = e + norm(b - a) * len;
return min_d;
}
// 求向量a和向量b围成的扇形的面积
double get_sector(PDD a, PDD b)
{
double angle = acos(a & b / get_len(a) / get_len(b));
if(sign(a * b) < 0) angle = -angle;
return R * R * angle / 2;
}
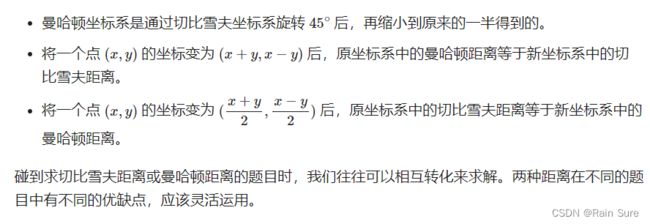
1.2 距离转换
1.3 Pick定理
Pick定理:给定顶点均为整点的简单多边形,皮克定理说明了其面积 A A A 和内部格点数目 i i i,边上格点数目b的关系:
A = i + b / 2 − 1 A = i + b / 2 - 1 A=i+b/2−1。
1.4 多边形
1.4.1三角形
(1) 求面积
- 叉积
- 海伦公式
p = (a + b + c) / 2;
S = sqrt(p * (p - a) * (p - b) * (p - c));
(2) 三角形四心
- 外心,外接圆圆心
三条边中垂线交点,到三角形三个顶点的距离相等。 - 内心,内切圆圆心
角平分线交点,到三边距离相等。 - 垂心
三条垂线交点。 - 重心
三条中线交点(到三角形三顶点距离的平方和最小的点,三角形内到三边距离之积最大的点)
(3) 求多边形面积
可以从第一个顶点出发把凸多边形分成n - 2个三角形,然后把面积加起来。
double polygon_area(PDD p[], int n)
{
double s = 0;
for(int i = 1; i < n - 1; i ++){
s += cross(p[i] - p[0], p[i + 1] - p[i]);
}
return s / 2;
}
1.5 极角序
在平面选取一个顶点O,称为极点;做射线X,那么OX就是极轴。平面上任意一点和O点作向量。通常选定逆时针方向为正,一般我们以X轴为极轴,那么极角就是平面向量与X轴的夹角。
极角排序:
给定极轴,在平面上分布着若干点,将这些点相对于极轴的大小排序,就叫做极角排序。注意,极角相同时,按照X的升序处理。
// 方法1:利用atan2函数,速度快,精度低
#include// 方法2:利用向量叉积排序
bool cmp(PDD a, PDD b)
{
if(sign(cross(a, b)) == 0) return a.x < b.x;
return sign(cross(a, b)) > 0;
}
// 自定义极点
PII o;
bool cmp(PDD a, PDD b)
{
auto p = a - o, q = b - o;
if(sign(cross(p, q)) == 0) return p.x < q.x;
return sign(cross(p, q)) > 0;
}
1.6 二维凸包
PDD q[N];
int stk[N];
bool used[N];
// 求凸包周长
double andrew()
{
sort(q, q + n);
for (int i = 0; i < n; i ++ )
{
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
{
if (area(q[stk[top - 2]], q[stk[top - 1]], q[i]) < 0)
used[stk[ -- top]] = false;
else top -- ;
}
stk[top ++ ] = i;
used[i] = true;
}
used[0] = false;
for (int i = n - 1; i >= 0; i -- )
{
if (used[i]) continue;
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
top -- ;
stk[top ++ ] = i;
}
top --;
double res = 0;
for (int i = 1; i <= top; i ++ )
res += get_dist(q[stk[i - 1]], q[stk[i]]);
return res;
}
1.7 半平面交
Line lines[maxn];
int n, m, cnt;
PDD pg[maxn], ans[maxn];
int q[maxn];
bool cmp(const Line& a, const Line& b)
{
double thetaA = get_angle(a), thetaB = get_angle(b);
if(!dcmp(thetaA, thetaB)) return area(a.st, a.ed, b.ed) < 0;
return thetaA < thetaB;
}
// 求交集面积
double half_plane_intersection()
{
sort(lines, lines + cnt, cmp);
int hh = 0, tt = -1;
for(int i = 0; i < cnt; i ++){
if(i && !dcmp(get_angle(lines[i]), get_angle(lines[i - 1]))) continue;
while(hh + 1 <= tt && on_right(lines[i], lines[q[tt - 1]], lines[q[tt]])) tt --;
while(hh + 1 <= tt && on_right(lines[i], lines[q[hh]], lines[q[hh + 1]])) hh ++;
q[++ tt] = i;
}
while(hh + 1 <= tt && on_right(lines[q[hh]], lines[q[tt - 1]], lines[q[tt]])) tt --;
while(hh + 1 <= tt && on_right(lines[q[tt]], lines[q[hh]], lines[q[hh + 1]])) hh ++;
q[++ tt] = q[hh];
int k = 0;
for(int i = hh; i < tt; i ++){
ans[k ++] = get_line_intersection(lines[q[i]], lines[q[i + 1]]);
}
double res = 0;
for(int i = 1; i + 1 < k; i ++){
res += area(ans[0], ans[i], ans[i + 1]);
}
return res / 2;
}
1.8 最小圆覆盖
给定二维平面上的 n n n个点,找一个最小的能包含所有点的圆。
struct Line
{
PDD st, ed;
};
struct Circle
{
PDD p;
double r;
};
Line get_line(Line a) // 求直线a的中垂线
{
return {(a.st + a.ed) / 2, rotate(a.ed - a.st, pi / 2)};
}
Circle get_clrcle(PDD a, PDD b, PDD c) // 根据三点确定一个圆
{
auto u = get_line({a, b}), v = get_line({a, c});
auto p = get_line_intersection(u.st, u.ed, v.st, v.ed);
return {p, get_dist(p, a)};
}
Circle get_the_min_circle() // 求最小圆
{
random_shuffle(q, q + n);
Circle c({q[0], 0});
for(int i = 1; i < n; i ++){
if(dcmp(c.r, get_dist(c.p, q[i])) < 0){
c = {q[i], 0};
for(int j = 0; j < i; j ++){
if(dcmp(c.r, get_dist(c.p, q[j])) < 0){
c = {(q[i] + q[j]) / 2, get_dist(q[i], q[j]) / 2};
for(int k = 0; k < j; k ++){
if(dcmp(c.r, get_dist(c.p, q[k])) < 0){
c = get_clrcle(q[i], q[j], q[k]);
}
}
}
}
}
}
return c;
}
1.9 最小矩形覆盖
给定二维平面上的一组点,求覆盖这组点的最小的矩形的面积。
int n;
PDD q[maxn];
PDD ans[maxn];
double min_area = inf;
int stk[maxn], top;
bool used[maxn];
void get_convex() // 求凸包
{
sort(q, q + n);
for (int i = 0; i < n; i ++ )
{
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
{
if (area(q[stk[top - 2]], q[stk[top - 1]], q[i]) < 0)
used[stk[ -- top]] = false;
else top -- ;
}
stk[top ++ ] = i;
used[i] = true;
}
used[0] = false;
for (int i = n - 1; i >= 0; i -- )
{
if (used[i]) continue;
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
top -- ;
stk[top ++ ] = i;
}
top --;
}
void rotating_calipers() // 旋转卡壳
{
for(int i = 0, a = 2, b = 1, c = 2; i < top; i ++){
auto d = q[stk[i]], e = q[stk[i + 1]];
while (dcmp(area(d, e, q[stk[a]]), area(d, e, q[stk[a + 1]])) < 0) a = (a + 1) % top;
while (dcmp(project(d, e, q[stk[b]]), project(d, e, q[stk[b + 1]])) < 0) b = (b + 1) % top;
if (!i) c = a;
while (dcmp(project(d, e, q[stk[c]]), project(d, e, q[stk[c + 1]])) > 0) c = (c + 1) % top;
auto x = q[stk[a]], y = q[stk[b]], z = q[stk[c]];
auto h = area(d, e, x) / get_len(e - d);
auto w = ((y - z) & (e - d)) / get_len(e - d);
if (h * w < min_area)
{
min_area = h * w;
ans[0] = d + norm(e - d) * project(d, e, y);
ans[3] = d + norm(e - d) * project(d, e, z);
auto u = norm(rotate(e - d, -pi / 2));
ans[1] = ans[0] + u * h;
ans[2] = ans[3] + u * h;
}
}
}
int main()
{
cin >> n;
for(int i = 0; i < n; i ++) cin >> q[i].x >> q[i].y;
get_convex();
rotating_calipers();
int k = 0;
for (int i = 1; i < 4; i ++ )
if (dcmp(ans[i].y, ans[k].y) < 0 || !dcmp(ans[i].y, ans[k].y) && dcmp(ans[i].x, ans[k].x) < 0)
k = i;
printf("%.5lf\n", min_area);
for (int i = 0; i < 4; i ++, k ++ )
{
auto x = ans[k % 4].x, y = ans[k % 4].y;
if (!sign(x)) x = 0;
if (!sign(y)) y = 0;
printf("%.5lf %.5lf\n", x, y);
}
return 0;
}
1.10 旋转卡壳
利用旋转卡壳求解二维平面最远点对
int stk[maxn], top;
bool used[maxn];
void andrew()
{
sort(q, q + n);
for (int i = 0; i < n; i ++ )
{
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
{
if (area(q[stk[top - 2]], q[stk[top - 1]], q[i]) < 0)
used[stk[ -- top]] = false;
else top -- ;
}
stk[top ++ ] = i;
used[i] = true;
}
used[0] = false;
for (int i = n - 1; i >= 0; i -- )
{
if (used[i]) continue;
while (top >= 2 && area(q[stk[top - 2]], q[stk[top - 1]], q[i]) <= 0)
top -- ;
stk[top ++ ] = i;
}
top -- ;
}
int rotating_calipers()
{
if(top <= 2) return get_dist(q[0], q[n - 1]);
int res = 0;
for(int i = 0, j = 2; i < top; i ++){
auto d = q[stk[i]], e = q[stk[i + 1]];
while(area(d, e, q[stk[j]]) < area(d, e, q[stk[j + 1]])) j = (j + 1) % top;
res = max(res, max(get_dist(d, q[stk[j]]), get_dist(e, q[stk[j]])));
}
return res;
}
1.11 三角剖分
// 求任意多边形和圆形面积交集的面积
// 利用三角剖分,将圆心和每条边的两个点连线,每次求三角形和原型交集的面积,累加求和即可。
// 要进行五种情况的分类讨论
// 求三角形oab和圆面积交集的面积,圆心处于原点
PDD r;
double R;
double get_circle_triangle_area(PDD a, PDD b)
{
auto da = get_dist(r, a), db = get_dist(r, b);
if(dcmp(R, da) >= 0 && dcmp(R, db) >= 0) return a * b / 2;
if(!sign(a * b)) return 0;
PDD pa, pb;
auto min_d = get_line_circle_intersection(a, b, pa, pb);
if(dcmp(R, min_d) <= 0) return get_sector(a, b);
if(dcmp(R, da) >= 0) return get_sector(pb, b) + a * pb / 2;
if(dcmp(R, db) >= 0) return get_sector(a, pa) + pa * b / 2;
return get_sector(a, pa) + pa * pb / 2 + get_sector(pb, b);
}
// 求面积,时间复杂度O(n)
double work()
{
double res = 0;
for(int i = 0; i < n; i ++){
res += get_circle_triangle_area(q[i], q[(i + 1) % n]);
}
return fabs(res);
}
1.12 扫描线
在二维平面中,求多个规则矩形面积的并。
// 矩形个数不多时,利用区间合并和扫描线。
// 按照x坐标大小进行排序,然后在每两个相邻的x之间,枚举全部矩形,矩形一定是跨过或者刚好在区间内,对这些矩形的y值进行区间合并,求出y方向的总长度,然后求面积再求和即可。
#include// 点数非常大时,需要用线段树进行维护
#include求三角形并的面积
给出n个三角形,利用扫描线求三角形并集的面积。
按照三角形的所有顶点和交点进行划分区间,每个区间内部是一些梯形,最后转化为求这些梯形面积的和,可以考虑在左右区间上进行区间合并,加快计算。
时间复杂度: O ( n 3 l o g n ) O(n^3 logn) O(n3logn)
#include1.13 自适应辛普森积分
给定一个积分函数和上下限,求积分值。
const double eps = 1e-12;
double l, r;
double f(double x)
{
// 根据题意来写
return sin(x) / x;
}
double simpson(double l, double r)
{
double mid = (l + r) / 2;
return (r - l) * (f(l) + 4 * f(mid) + f(r)) / 6;
}
double asr(double l, double r, double s)
{
double mid = (l + r) / 2;
double left = simpson(l, mid), right = simpson(mid, r);
if(fabs(left + right - s) < eps) return left + right;
return asr(l, mid, left) + asr(mid, r, right);
}
int main()
{
cin >> l >> r;
printf("%.6lf\n", asr(l, r, simpson(l, r)));
}
求圆的的并的面积
#include2. 三维计算几何
常用函数模板:
double rand_eps()
{
return ((double)rand() / RAND_MAX - 0.5) * eps;
}
struct Point // 三维坐标系中的点
{
double x, y, z;
void shake() // 给坐标值加一个微小抖动
{
x += rand_eps(), y += rand_eps(), z += rand_eps();
}
Point operator- (Point t)
{
return {x - t.x, y - t.y, z - t.z};
}
double operator& (Point t)
{
return x * t.x + y * t.y + z * t.z;
}
Point operator* (Point t)
{
return {y * t.z - t.y * z, z * t.x - x * t.z, x * t.y - y * t.x};
}
double len()
{
return sqrt(x * x + y * y + z * z);
}
}q[N];
struct Plane // 三维坐标系中的平面
{
int v[3];
Point norm() // 法向量
{
return (q[v[1]] - q[v[0]]) * (q[v[2]] - q[v[0]]);
}
double area() // 求面积
{
return norm().len() / 2;
}
bool above(Point a) // 判断点a是否在平面上方
{
return ((a - q[v[0]]) & norm()) >= 0;
}
}plane[N], np[N];
2.1 三维凸包
void get_convex_3d()
{
plane[m ++] = {0, 1, 2};
plane[m ++] = {2, 1, 0};
for(int i = 3; i < n; i ++){
int cnt = 0;
for(int j = 0; j < m; j ++){
bool t = plane[j].above(q[i]);
if(!t) np[cnt ++] = plane[j];
for(int k = 0; k < 3; k ++){
g[plane[j].v[k]][plane[j].v[(k + 1) % 3]] = t;
}
}
for(int j = 0; j < m; j ++){
for(int k = 0; k < 3; k ++){
int a = plane[j].v[k], b = plane[j].v[(k + 1) % 3];
if(g[a][b] && !g[b][a]){
np[cnt ++] = {a, b, i};
}
}
}
m = cnt;
for(int j = 0; j < m; j ++) plane[j] = np[j];
}
}
// 求面积
double res = 0;
for(int i = 0; i < m; i ++){
res += plane[i].area();
}