自动控制原理PID参数整定的Matlab实现
以一道题为例介绍调节PID控制器系数的方法,有:试凑法(Trial-and-Error Method)、齐格勒-尼科尔斯校正规则(Ziegler and Nichols First Method、Ziegler and Nichols Second Method),并在Matlab中进行仿真实验。
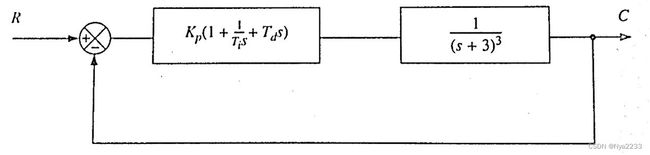
这是出自《线性控制系统工程/Linear Control Systems Engineering》的21.9题,要求设置PID控制器的参数。
无控制器时的响应
先分析没有PID控制器影响下的系统的阶跃响应,此时系统的开环传函为:
G H ( s ) = 1 ( s + 3 ) 3 = 1 s 3 + 9 s 2 + 27 s + 27 GH(s)=\frac{1}{(s+3)^3} =\frac{1}{s^3+9s^2+27s+27} GH(s)=(s+3)31=s3+9s2+27s+271
采用以下的Matlab代码,得到系统阶跃响应曲线:
num = 1; den = [1 9 27 27];
G = tf(num,den); sys = feedback(G,1);
[y,t] = step(sys); plot(t,y); hold on
legend('Step Response'); ylabel('Amplitude');xlabel('Time(s)'); grid;

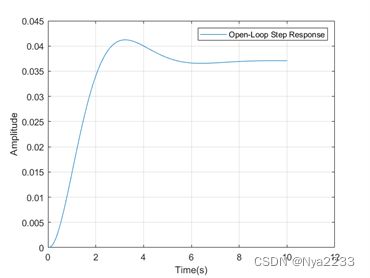
简单分析:在阶跃信号作用下,该系统大概经过3.1秒就达到稳态值,没有超调量,稳态值约为0.036,稳态误差为:
e s s = 1 1 + K p = 1 1 + lim s → 0 G ( s ) = 27 28 ≈ 0.964 \mathrm{e}_{\mathrm{ss}}=\frac{1}{1+\mathrm{K}_{\mathrm{p}}}=\frac{1}{1+\lim _{\mathrm{s} \rightarrow 0} \mathrm{G}(\mathrm{s})}=\frac{27}{28} \approx 0.964 ess=1+Kp1=1+lims→0G(s)1=2827≈0.964
试凑法(Trial-and-Error Method)
如果将PID控制的传递函数用Matlab的行向量表示,由于将 直接代入会产生无穷大使得程序出错,所以先对系统框图进行化简,求出其闭环传递函数:
C R = 1 1 + K p ( 1 + 1 T i s + T d s ) ( s + 1 ) 3 = K p ⋅ T d ⋅ T i ⋅ s 2 + K p ⋅ T i ⋅ s + K p T i ⋅ s 4 + 9 T i ⋅ s 3 + ( 27 + K p ⋅ T d ) ⋅ T i ⋅ s 2 + ( 27 + K p ) ⋅ T i ⋅ s + K p \begin{aligned} \frac{C}{R} & =\frac{1}{1+K_{p}\left(1+\frac{1}{T_{i}s}+\mathrm{T}_{\mathrm{d}} \mathrm{s}\right)(\mathrm{s}+1)^{3}} \\ & =\frac{\mathrm{K}_{\mathrm{p}} \cdot \mathrm{T}_{\mathrm{d}} \cdot \mathrm{T}_{\mathrm{i}} \cdot \mathrm{s}^{2}+\mathrm{K}_{\mathrm{p}} \cdot \mathrm{T}_{\mathrm{i}} \cdot \mathrm{s}+\mathrm{K}_{\mathrm{p}}}{\mathrm{T}_{\mathrm{i}} \cdot \mathrm{s}^{4}+9 \mathrm{~T}_{\mathrm{i}} \cdot \mathrm{s}^{3}+\left(27+\mathrm{K}_{\mathrm{p}} \cdot \mathrm{T}_{\mathrm{d}}\right) \cdot \mathrm{T}_{\mathrm{i}} \cdot \mathrm{s}^{2}+\left(27+\mathrm{K}_{\mathrm{p}}\right) \cdot \mathrm{T}_{\mathrm{i}} \cdot \mathrm{s}+\mathrm{K}_{\mathrm{p}}} \end{aligned} RC=1+Kp(1+Tis1+Tds)(s+1)31=Ti⋅s4+9 Ti⋅s3+(27+Kp⋅Td)⋅Ti⋅s2+(27+Kp)⋅Ti⋅s+KpKp⋅Td⋅Ti⋅s2+Kp⋅Ti⋅s+Kp
首先令 T i = 0 T_{i}=0 Ti=0、 T d = 0 T_{d}=0 Td=0,调节 K p K_{p} Kp以满足期望的动态特性,但是此时调节 K p K_{p} Kp会发现:当 K p > 0 K_{p}>0 Kp>0时,阶跃响应均为一条直线,且幅值为1,如图所示。
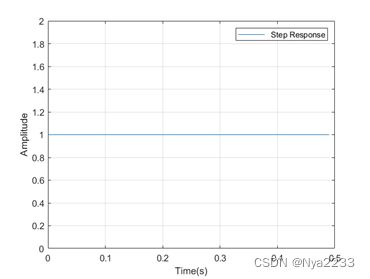
因为此时闭环传函 G H ( s ) = K p K p = 1 GH(s)=\frac{K_{p}}{K_{p}}=1 GH(s)=KpKp=1,有
c ( t ) = L − 1 [ G H ( s ) ⋅ R ] = L − 1 [ 1 s ] = 1 c(t)=\mathscr{L}^{-1}\left[ GH(s)\cdot {R} \right] =\mathscr{L}^{-1}\left[ \frac{1}{s} \right] =1 c(t)=L−1[GH(s)⋅R]=L−1[s1]=1
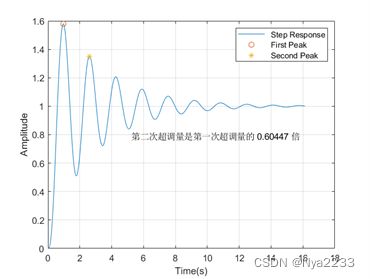
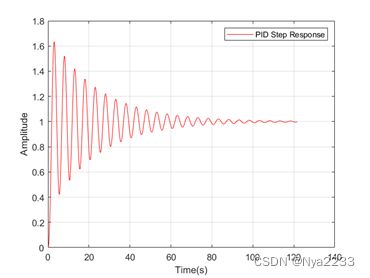
所以需要增加一个变量 T i T_{i} Ti来共同调节。设 K p = 100 K_{p}=100 Kp=100、 T i = 1 T_{i}=1 Ti=1、 T d = 0 T_{d}=0 Td=0可得如下所示的阶跃响应。
代码如下
Kp = 100;
Ti = 1;
Td = 0;
sys = tf([Kp*Td*Ti Kp*Ti Kp],[Ti 9*Ti (27+Kp*Td)*Ti (27+Kp)*Ti Kp]);
[y,t] = step(sys); %得到阶跃响应达到稳定前的幅值和时间的行向量y,t
[Y,T] = max(y); %找出阶跃响应达到稳定前的幅值y中最大值Y和所在时间T
%求出阶跃响应达到稳定的时间SteadyStateTime,即求t的长度
SteadyStateTime = length(t);
%求出阶跃响应达到稳定的幅值SteadyStateOutput,即t= SteadyStateTime时,y的值
SteadyStateOutput = y(SteadyStateTime);
[pks,locs] = findpeaks(y,t);%找出y和t中的峰值pks和达到峰值时间locs
figure(1);plot(t,y);hold on
if isempty(pks) == 0%如果找到了pks和 locs就进入if条件
PO1 = 100*(pks(1)-SteadyStateOutput)/SteadyStateOutput;%计算第一个超调量
PO2 = 100*(pks(2)-SteadyStateOutput)/SteadyStateOutput;%计算第二个超调量
plot(locs(1),pks(1),'o');hold on;%在图中用“o”标出第一个超调量
plot(locs(2),pks(2),'*');hold on;%在图中用“*”标出第二个超调量
POP = PO2/PO1;%计算两个超调量的比值
POtext = strcat("第二次超调量是第一次超调量的 ",num2str(POP)," 倍");
text(locs(2)*0.8,pks(1)*0.5,POtext);
legend(' Step Response',' First Peak',' Second Peak');
else
legend(' Step Response');
end
ylabel('Amplitude');xlabel('Time(s)');
grid;
由于加入微分环节会增大系统的阻尼比,能用来改善系统的动态特性,一定程度上可以用来减少超调量、缩短调节时间。所以在加入微分环节前,虽然目前 K p = 100 K_{p}=100 Kp=100、 T i = 1 T_{i}=1 Ti=1、 T d = 0 T_{d}=0 Td=0时的阶跃曲线,不满足第二次超调量是第一次超调量的1/4的最优性能的条件,但在加入微分环节后可以改善系统的阻尼比,可以使得上述参数下的系统阶跃响应往“好”的响应发展。
令 K p = 100 K_{p}=100 Kp=100、 T i = 1 T_{i}=1 Ti=1、 T d = 0.1 T_{d}=0.1 Td=0.1,此时系统的阶跃响应如图所示。
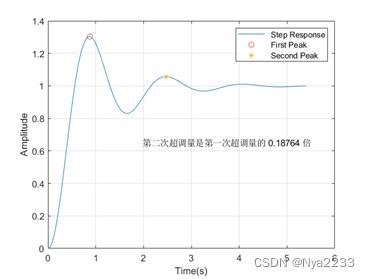
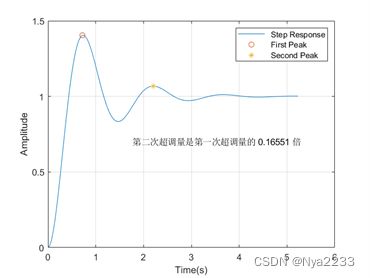
此时系统的阶跃响应仍不满足第二次超调量是第一次超调量的1/4的最优性能的条件,但可以通过增大比例环节的系数 K p K_{p} Kp来增大系统的超调量来满足这个条件。令 K p = 120 K_{p}=120 Kp=120、 T i = 1 T_{i}=1 Ti=1、 T d = 0.1 T_{d}=0.1 Td=0.1,此时系统的阶跃响应如图所示。
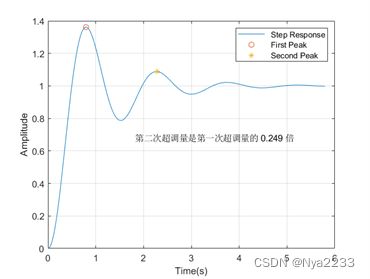
此时第二次超调量是第一次的0.249倍,基本上符合了最优性能的指标,但不难看出系统达到稳态的时间约为5秒,试凑出来的PID控制器的系数仍有不足。
完整的Matlab代码如下:
Kp = 120; Ti = 1; Td = 0.1;
sys = tf([Kp*Td*Ti Kp*Ti Kp],[Ti 9*Ti (27+Kp*Td)*Ti (27+Kp)*Ti Kp]);
[y,t] = step(sys); %得到阶跃响应达到稳定前的幅值和时间的行向量y,t
[Y,T] = max(y); %找出阶跃响应达到稳定前的幅值y中最大值Y和所在时间T
%求出阶跃响应达到稳定的时间SteadyStateTime,即求t的长度
SteadyStateTime = length(t);
%求出阶跃响应达到稳定的幅值SteadyStateOutput,即t= SteadyStateTime时,y的值
SteadyStateOutput = y(SteadyStateTime);
[pks,locs] = findpeaks(y,t);%找出y和t中的峰值pks和达到峰值时间locs
figure(1);plot(t,y);hold on
if isempty(pks) == 0%如果找到了pks和 locs就进入if条件
PO1 = 100*(pks(1)-SteadyStateOutput)/SteadyStateOutput;%计算第一个超调量
PO2 = 100*(pks(2)-SteadyStateOutput)/SteadyStateOutput;%计算第二个超调量
plot(locs(1),pks(1),'o');hold on;%在图中用“o”标出第一个超调量
plot(locs(2),pks(2),'*');hold on;%在图中用“*”标出第二个超调量
POP = PO2/PO1;%计算两个超调量的比值
POtext = strcat("第二次超调量是第一次超调量的 ",num2str(POP)," 倍");
text(locs(2)*0.8,pks(1)*0.5,POtext);
legend(' Step Response',' First Peak',' Second Peak');
else
legend(' Step Response');
end
ylabel('Amplitude');xlabel('Time(s)'); grid;
扩展:衰减曲线法
Trial-and-Error Method是令 T i = 0 T_{i}=0 Ti=0、 T d = 0 T_{d}=0 Td=0,先调节 K p K_{p} Kp、再调节 T i T_{i} Ti、最后调节 T d T_{d} Td。但如果是直接从 K p K_{p} Kp、 K i K_{i} Ki、 K d K_{d} Kd来进行调节,又该如何操作呢?有一种方法叫“衰减曲线法”可以很好地帮助我们解决这个问题。(出自:《基于衰减曲线法整定PID调节器参数仿真技术研究》)
首先将 T i = ∞ T_{i}=\infty Ti=∞、 T d = 0 T_{d}=0 Td=0,逐渐增大 K p K_{p} Kp,使得系统的阶跃响应曲线出现第二次超调量是第一次超调量的0.25倍,此时令 δ s = K p \delta_{s}=K_{p} δs=Kp,计算此时两次超调量的时间间隔 T s T_{s} Ts,代入下表即可计算出最终的PID控制器的系数。
| 衰减率 | 控制器 | 比例系数 K p K_{p} Kp | 积分系数 K i K_{i} Ki | 微分系数 K d K_{d} Kd |
|---|---|---|---|---|
| 0.75 | P | δ s \delta_{s} δs | 0 | 0 |
| 0.75 | PI | 1.2 δ s 1.2\delta_{s} 1.2δs | 2.4 δ s T s 2.4\delta_{s}T_{s} 2.4δsTs | 0 |
| 0.75 | PID | 0.8 δ s 0.8\delta_{s} 0.8δs | 2.66 δ s T s \frac{2.66\delta_{s}}{T_{s}} Ts2.66δs | 0.08 δ s T s 0.08\delta_{s}T_{s} 0.08δsTs |
但在第一步将 T i = ∞ T_{i}=\infty Ti=∞是不符合Matlab语法规定的,所以可以改变系统的PID控制器的传递函数为:
θ o θ i = K p ( 1 + 1 T i s + T d s ) = K p + K i s + K d s \frac{\theta_{o}}{\theta_{i}}=K_{p}(1+\frac{1}{T_{i}s}+T_{d}s)=K_{p}+\frac{K_{i}}{s}+K_{d} s θiθo=Kp(1+Tis1+Tds)=Kp+sKi+Kds
也就实现了直接从 K p K_{p} Kp、 K i K_{i} Ki、 K d K_{d} Kd来进行调节的方法。这里使用Simulink来进行仿真更方便。
先令 K i = 0 K_{i}=0 Ki=0、 K d = 0 K_{d}=0 Kd=0,借助Matlab的Simulink工具搭建可如下所示的模块图。
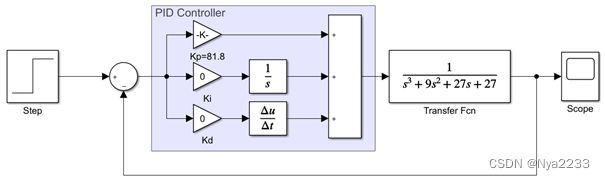
只需修改 K p K_{p} Kp的Gain使得在Scpoe模快显示的系统的阶跃响应曲线出现第二次超调量是第一次超调量的0.25倍即可,发现当 K p = 81.8 K_{p}=81.8 Kp=81.8时满足此条件,所以有 δ s = 81.8 \delta_{s}=81.8 δs=81.8。
在找出第二次超调量是第一次超调量的0.25倍的 δ s \delta_{s} δs值后,仍需求出其第一次超调量与第二次超调量的时间间隔 T s T_{s} Ts。在搭建完成此Simulink模块图后,进行一些简单的设置可以更方便地展示两次超调的时间间隔:
1、双击Step模块,调节Step time(阶跃发生时间)设置为0s(默认为1s)。
2、设置菜单栏上的SIMULATE工具中的Stop time为10,如图所示。

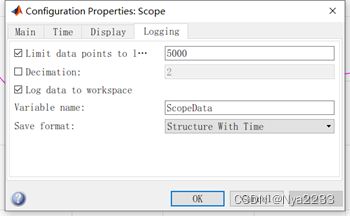
3、为了方便用Matlab代码来分析,需要将Scope模块的数据导出到Matlab的工作区,双击Scope模块,将Logging功能设置为如图所示,启用仿真功能后会输出一个命名为“out”的结构体到Matlab的工作区。
剩余的matlab代码如下:
y = out.ScopeData.signals.values; t = out.ScopeData.time;
[Y,T] = max(y);
SteadyStateTime = length(t);
SteadyStateOutput = y(SteadyStateTime);
[pks,locs] = findpeaks(y,t);
figure(1);plot(t,y);hold on
if isempty(pks) == 0
PO1 = 100*(pks(1)-SteadyStateOutput)/SteadyStateOutput;
PO2 = 100*(pks(2)-SteadyStateOutput)/SteadyStateOutput;
plot(locs(1),pks(1),'o');hold on;
plot(locs(2),pks(2),'*');hold on;
POP = PO2/PO1;
POtext = strcat("第二次超调量是第一次超调量的 ",num2str(POP)," 倍");
text(locs(2)*0.8,pks(1)*0.5,POtext);
Ts = locs(2)-locs(1); %计算两个超调量的时间间隔
Tstext = strcat("第一次超调量与第二次超调量的时间间隔Ts为 ",num2str(Ts),"s");
text(locs(2)*0.8,pks(1)*0.4,Tstext);
legend(' Step Response',' First Peak',' Second Peak');
else
legend(' Step Response');
end
ylabel('Amplitude'); xlabel('Time(s)'); grid;
启用Simulink的仿真功能和运行上述Matlab代码后可得下图。
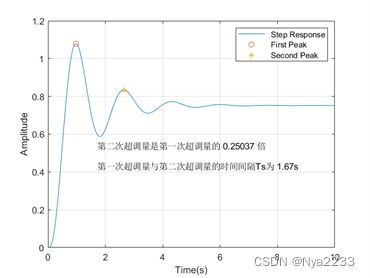
得到了第二次超调量是第一次超调量的0.25倍的 δ s = 81.8 \delta_{s}=81.8 δs=81.8、两次超调时间间隔 T s = 1.67 T_{s}=1.67 Ts=1.67。根据上表的经验公式计算其最终的PID控制器系数:
比例系数:
K p = 0.8 δ s = 0.8 ∗ 81.8 = 65.44 K_{p}=0.8\delta_{s}=0.8 * 81.8 =65.44 Kp=0.8δs=0.8∗81.8=65.44
积分系数:
K i = 2.66 δ s T s = 2.66 ∗ 81.8 1.67 ≈ 130.30 K_{i}=\frac{2.66\delta_{s}}{T_{s}}=\frac{2.66 * 81.8}{1.67} \approx 130.30 Ki=Ts2.66δs=1.672.66∗81.8≈130.30
微分系数:
K d = 0.08 δ s T s = 0.08 ∗ 81.8 ∗ 1.67 ≈ 10.93 K_{d}=0.08\delta_{s}T_{s}=0.08 * 81.8 * 1.67 \approx 10.93 Kd=0.08δsTs=0.08∗81.8∗1.67≈10.93
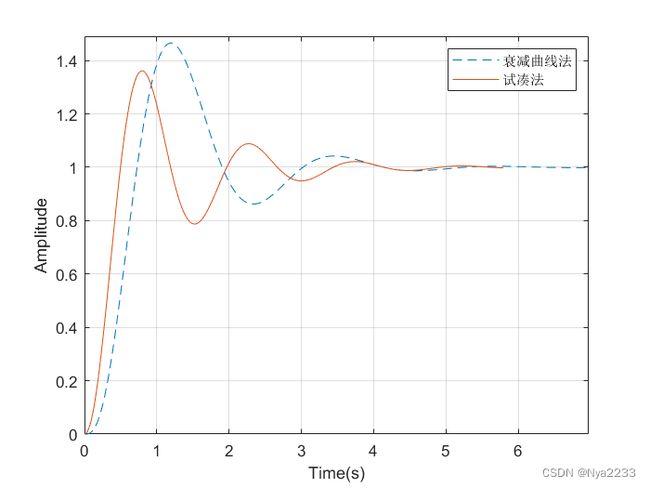
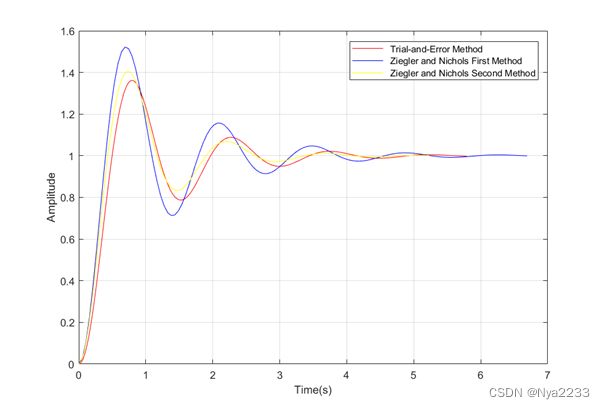
上图是用衰减曲线法和试凑法得到的系统阶跃响应曲线。虽然两种方法都要找参数来满足1/4PO响应曲线,但是衰减曲线法的规则比试凑法的更加明确,且只需调整一个参数,在 K i = 0 K_{i}=0 Ki=0、 K d = 0 K_{d}=0 Kd=0( T i = ∞ T_{i}=\infty Ti=∞、 T d = 0 T_{d}=0 Td=0)条件下,找出使得第二次超调量是第一次超调量的0.25倍的 K p K_{p} Kp值,令该值为 δ s \delta_{s} δs,代入表中即可算出最终的PID控制器系数。而试凑法要调整三个PID控制器参数来找出1/4PO响应曲线。
通过比较也不难看出:虽然在这次实验中衰减曲线法得出的响应曲线的反应速度会比试凑法得出的曲线略慢,但第二次超调量会迅速降低,随后快速进入稳定状态。
齐格勒-尼科尔斯第一方法(Ziegler and Nichols First Method)
在采用这个方法前,需判断没有PID控制器影响下的系统开环传函的阶跃响应是否有超调,如果没有则可以使用这个方法,本文的开头以通过实验证明过这点。
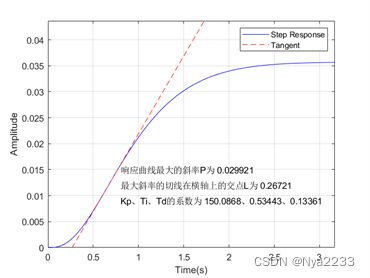
通过下面代码可以得到没有PID控制器影响下的系统的阶跃响应曲线,并显示了P、L和PID的参数。
num = 1; den = [1 9 27 27];
G = tf(num,den); sys = feedback(G,1); [y,t] = step(sys);
[P,idx] = max(diff(y)./diff(t));%求出响应曲线最大的斜率P及其下标idx
Tangent_b = y(idx) - P * t(idx);%最大斜率P的切线Tangent的常数项
L = - Tangent_b/P;%该切线在横轴上的交点
t0 = P * max(t) + Tangent_b;
plot(t,y,'b',[L max(t)],[0 t0],'r--')
axis([0,max(t),0,max(y)+0.008]);
legend('Step Response','Tangent');
ylabel('Amplitude');xlabel('Time(s)');
Ptext = strcat("响应曲线最大的斜率P为 ",num2str(P));text(0.8,0.015,Ptext);
Ltext = strcat("最大斜率的切线在横轴上的交点L为 ",num2str(L));text(0.8,0.012,Ltext);
PIDtext = strcat("Kp、Ti、Td的系数为 ",num2str(1.2/(P*L)),"、",num2str(2*L),"、",num2str(0.5*L));%代入公式,计算Kp、Ti、Td
text(0.8,0.009,PIDtext); grid;
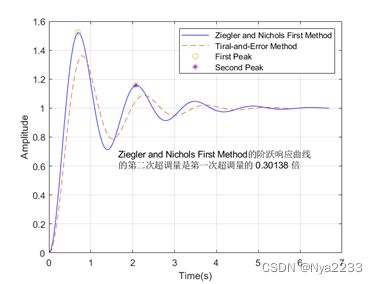
将算出的PID控制器系数下的系统阶跃响应曲线用Matlab求出,将其与试凑法得出的系统阶跃响应曲线进行对比,得到下图。通过比较可以看出虽然Ziegler and Nichols First Method求出的阶跃响应的两次超调量之比大于Tiral-and-Error Method求出的阶跃响应,但其系统的响应速度比Tiral-and-Error Method要略快,同时求系数的过程也比Tiral-and-Error Method的要简单,但这种方法有一个限制条件是在没有PID控制器影响下的系统的开环传函的阶跃响应不能有超调。
为什么不能有超调
采用这种方法的系统的开环传函的阶跃响应为什么不能有超调?假设一个没有PID控制器的系统的开环传递函数为:
G H ( s ) = 1 ( s + 3 ) 3 = 1 s 3 + 20 s 2 + 27 s + 27 GH(s)=\frac{1}{(s+3)^3} =\frac{1}{s^3+20s^2+27s+27} GH(s)=(s+3)31=s3+20s2+27s+271
它的阶跃响应曲线如图所示,有超调。
在该系统中加入PID控制器,用该方法求出其PID控制器系数为 K p = 6.3891 K_{p}=6.3891 Kp=6.3891、 T i = 0.1692 T_{i}=0.1692 Ti=0.1692、 T d = 0.0423 T_{d}=0.0423 Td=0.0423,此时系统的阶跃响应曲线如图所示。
通过这次简单分析可知:系统在没有PID控制器的情况下的开环传函的阶跃响应中有超调,且使用了Ziegler and Nichols First Method来求其PID控制器系数,会导致求出来的PID控制器系数偏小,需要人为地进行校正。
齐格勒-尼科尔斯第二方法(Ziegler and Nichols Second Method)
在只考虑系统的比例控制的情况下,求出系统的临界增益 K p ′ K_{p}' Kp′,使得系统响应曲线出现等幅振荡,此时系统的开环传递函数:
G H ( s ) = 1 ( s + 3 ) 3 = 1 s 3 + 9 s 2 + 27 s + 27 GH(s)=\frac{1}{(s+3)^3} =\frac{1}{s^3+9s^2+27s+27} GH(s)=(s+3)31=s3+9s2+27s+271
得特征方程为 s 3 + 9 s 2 + 27 s + ( 27 + K p ′ ) = 0 \text{s}^3+9\text{s}^2+27\text{s}+\left( 27+\text{K}_{\text{p}}' \right) =0 s3+9s2+27s+(27+Kp′)=0,可得劳斯表为:
| s 3 s^3 s3 | 1 | 27 |
|---|---|---|
| s 2 s^2 s2 | 9 | 27 + K p ′ K_{p}' Kp′ |
| s 1 s^1 s1 | 24 − K p ′ 9 24-\frac{K_{p}'}{9} 24−9Kp′ | 0 |
| s 0 s^0 s0 | 27 + K p ′ 9 27+\frac{K_{p}'}{9} 27+9Kp′ | 0 |
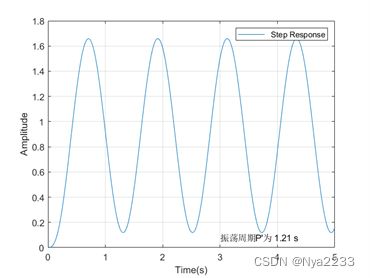
可知系统的临界稳定条件为: 24 − K p ′ 9 = 0 24-\frac{K_{p}'}{9}=0 24−9Kp′=0,即 K p ′ = 216 K_{p}'=216 Kp′=216。同时在计算劳斯表时不难发现:这种方法只适用于三阶及其以上的系统,二阶系统是算不出临界增益 K p ′ K_{p}' Kp′的。此时系统的阶跃响应曲线如图所示,系统处于等幅振荡,通过Matlab易求出振荡周期 P ′ = 1.21 s P'=1.21s P′=1.21s。
代入公式,求出此时PID控制器系数为 K p = 6.3891 K_{p}=6.3891 Kp=6.3891、 T i = 0.605 T_{i}=0.605 Ti=0.605、 T d = 0.15125 T_{d}=0.15125 Td=0.15125,此时系统的阶跃响应曲线如图所示。
Ziegler and Nichols Second Method,在国内很多资料也被称为“临界比例度法”,是PID参数整定中常用的一种闭环整定方法。通过这种方法求出系统阶跃响应曲线的前两次超调量之比小于0.25,说明此PID参数下的系统响应的快速调节能力很强,能够快速减少超调量,且系统达到稳定的速度也很快。同时这种方法的规律十分清晰,然而这种方法只适用于三阶及其以上的系统,下面将会进行简单的探究:为什么二阶系统不适用于这种方法。
为什么仅适用于三阶及以上的系统
假设一个二阶系统的特征方程为:
s 2 + α x + β = 0 s^2+\alpha x+\beta=0 s2+αx+β=0
用第二方法整定PID参数时,有
s 2 + α x + ( β + K p ′ ) = 0 s^2+\alpha x+(\beta + K_{p}')=0 s2+αx+(β+Kp′)=0
有劳斯表:
| s 2 s^2 s2 | 1 | β + K p ′ \beta + K_{p}' β+Kp′ |
|---|---|---|
| s 1 s^1 s1 | α \alpha α | 0 |
| s 0 s^0 s0 | α ( β + K p ′ ) α \frac{\alpha(\beta + K_{p}')}{\alpha} αα(β+Kp′) |
劳斯表第一列均大于0,求不出临界稳定时 K p ′ K_{p}' Kp′
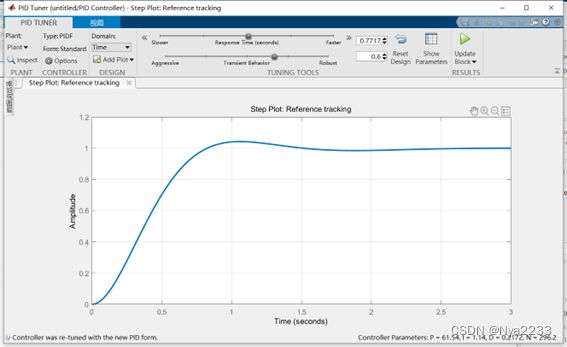
PID Tuner
PID Tuner是Maltab的Simulink工具中PID控制器模块提供的一个功能,它能够自动地调节PID控制器的参数,使得系统的响应速度和动态特性达到最大平衡,也可以人为地调节系统的响应速度和动态特性。需要在Simulink中搭建一个如图所示的模块图。

总结