- 铭刻于星(四十二)
随风至
69夜晚,绍敏同学做完功课后,看了眼房外,没听到动静才敢从书包的夹层里拿出那个心形纸团。折痕压得很深,都有些旧了,想来是已经写好很久了。绍敏同学慢慢地、轻轻地捏开折叠处,待到全部拆开后,又反复抚平纸张,然后仔细地一字字默看。只是开头的三个字是第一次看到,让她心漏跳了几拍。“亲爱的绍敏:从四年级的时候,我就喜欢你了,但是我一直不敢说,怕影响你学习。六年级的时候听说有人跟你表白,你接受了,我很难过,但
- 【iOS】MVC设计模式
Magnetic_h
iosmvc设计模式objective-c学习ui
MVC前言如何设计一个程序的结构,这是一门专门的学问,叫做"架构模式"(architecturalpattern),属于编程的方法论。MVC模式就是架构模式的一种。它是Apple官方推荐的App开发架构,也是一般开发者最先遇到、最经典的架构。MVC各层controller层Controller/ViewController/VC(控制器)负责协调Model和View,处理大部分逻辑它将数据从Mod
- OC语言多界面传值五大方式
Magnetic_h
iosui学习objective-c开发语言
前言在完成暑假仿写项目时,遇到了许多需要用到多界面传值的地方,这篇博客来总结一下比较常用的五种多界面传值的方式。属性传值属性传值一般用前一个界面向后一个界面传值,简单地说就是通过访问后一个视图控制器的属性来为它赋值,通过这个属性来做到从前一个界面向后一个界面传值。首先在后一个界面中定义属性@interfaceBViewController:UIViewController@propertyNSSt
- Google earth studio 简介
陟彼高冈yu
旅游
GoogleEarthStudio是一个基于Web的动画工具,专为创作使用GoogleEarth数据的动画和视频而设计。它利用了GoogleEarth强大的三维地图和卫星影像数据库,使用户能够轻松地创建逼真的地球动画、航拍视频和动态地图可视化。网址为https://www.google.com/earth/studio/。GoogleEarthStudio是一个基于Web的动画工具,专为创作使用G
- 在一台Ubuntu计算机上构建Hyperledger Fabric网络
落叶无声9
区块链超级账本Hyperledgerfabric区块链ubuntu构建hyperledgerfabric
在一台Ubuntu计算机上构建HyperledgerFabric网络Hyperledgerfabric是一个开源的区块链应用程序平台,为开发基于区块链的应用程序提供了一个起点。当我们提到HyperledgerFabric网络时,我们指的是使用HyperledgerFabric的正在运行的系统。即使只使用最少数量的组件,部署Fabric网络也不是一件容易的事。Fabric社区创建了一个名为Cello
- 【JS】执行时长(100分) |思路参考+代码解析(C++)
l939035548
JS算法数据结构c++
题目为了充分发挥GPU算力,需要尽可能多的将任务交给GPU执行,现在有一个任务数组,数组元素表示在这1秒内新增的任务个数且每秒都有新增任务。假设GPU最多一次执行n个任务,一次执行耗时1秒,在保证GPU不空闲情况下,最少需要多长时间执行完成。题目输入第一个参数为GPU一次最多执行的任务个数,取值范围[1,10000]第二个参数为任务数组长度,取值范围[1,10000]第三个参数为任务数组,数字范围
- CX8836:小体积大功率升降压方案推荐(附Demo设计指南)
诚芯微科技
社交电子
CX8836是一颗同步四开关单向升降压控制器,在4.5V-40V宽输入电压范围内稳定工作,持续负载电流10A,能够在输入高于或低于输出电压时稳定调节输出电压,可适用于USBPD快充、车载充电器、HUB、汽车启停系统、工业PC电源等多种升降压应用场合,为大功率TYPE-CPD车载充电器提供最优解决方案。提供CX8836Demo测试、CX8836样品申请及CX8836方案开发技术支持。CX8836同升
- 烟花美,但瞬间即逝的样子像极了爱情。
胡萝卜很甜
我见过烟花在天上绽放时绚烂的模样也目睹过爱情消逝曾经相爱的两人变冷漠的样子其实我特别喜欢烟花绽放的艳丽大年初一凌晨的烟花手机拍的没有眼睛看到的美但是烟花虽美,稍纵即逝,眼睛刚记录下它的美好,就转眼消失不见。天空又恢复一片黑。烟花的样子像极了爱情啊……不论曾经多么山盟海誓,海枯石烂。只要吵架或者分手。就变得那么冷漠,那么陌生。你甚至开始怀疑你有过爱情么?真正的爱情到底是什么样子。来的快去的也快么?对
- 学霸父母学渣娃,这孩子真是亲生的?太扎心了!
东北SK皇家成长中心
现在的社会,每个家庭基本都把孩子的教育放在第一位,哪怕父母平时上班再苦再累也不敢在孩子的教育上有丝毫的马虎,平时对孩子的照顾真的是无微不至,每天早起送孩子上学,晚上回家辅导孩子写作业,有的父母的文化程度非常高,但是每每到了辅导孩子写作业这个时候,父母们内心都有这样一种想法,这个孩子真的是我亲生的吗?真想一巴掌拍死他,我上辈子是做了什么孽生出这么一个智障的孩子,家里每每就要上演全武行,看看这些孩子到
- “日舍一物”之42——活在当下,并向前看
記二十一
这件衣服已经有十五、六年了(突然发现我可真是能囤东西啊)。这原本是一件我非常喜欢的衣服,无论是样子,还是质地。照片拍的比较渣,但其实,白色棉质衣料中,尚织有银色的丝线,在阳光或灯光下,会闪亮,不晃眼,但很漂亮。或许正是因为太喜欢了,所以一直保留着,尽管很多年都没有再穿过了。因为不合适了。首先是随着年龄的增长,尽管体重总量没有太多变化(哦,其实还是涨了)。但是体型还是和十几年前不一样了,最明显的就是
- 如何用matlab灵活控制feko的求解
NingrLi
matlab开发语言
https://bbs.rfeda.cn/read.php?tid=3778Feko中的模型和求解设置等都可以通过editfeko进行设置,其文件存储为.pre文件,该文件可以用文本打开,因此,我们可以通过VB、VC、matlab等工具对.pre文件进行读写操作,以达到更灵活的使用feko。同样,对于.out文件,我们也可以进行读操作。熟练使用对.pre文件和.out文件的操作后,我们可以方便的计
- 摄影小白,怎么才能拍出高大上产品图片?
是波妞唉
很多人以为文案只要会码字,会排版就OK了!说实话,没接触到这一行的时候,我的想法更简单,以为只要会写字就行!可是真做了文案才发现,码字只是入门级的基本功。一篇文章离不开排版、配图,说起来很简单!从头做到尾你就会发现,写文章用两个小时,找合适的配图居然要花掉半天的时间,甚至更久!图片能找到合适的就不怕,还有找不到的,比如产品图,只能亲自拍。拿着摆弄了半天,就是拍不出想要的效果,光线不好、搭出来丑破天
- 基于STM32的汽车仪表显示系统:集成CAN、UART与I2C总线设计流程
极客小张
stm32汽车嵌入式硬件物联网单片机c语言
一、项目概述项目目标与用途本项目旨在设计和实现一个基于STM32微控制器的汽车仪表显示系统。该系统能够实时显示汽车的速度、转速、油量等关键信息,并通过CAN总线与其他汽车控制单元进行通信。这种仪表显示系统不仅提高了驾驶的安全性和便捷性,还能为汽车提供更智能的用户体验。技术栈关键词微控制器:STM32显示技术:TFTLCD/OLED传感器:速度传感器、温度传感器、油量传感器通信协议:CAN总线、UA
- Spring Boot中实现跨域请求
BABA8891
springboot后端java
在SpringBoot中实现跨域请求(CORS,Cross-OriginResourceSharing)可以通过多种方式,以下是几种常见的方法:1.使用@CrossOrigin注解在SpringBoot中,你可以在控制器或者具体的请求处理方法上使用@CrossOrigin注解来允许跨域请求。在控制器上应用:importorg.springframework.web.bind.annotation.
- 天下
云逸1108
00云逸109901336刚刚桃红柳绿千家乐,山青水秀万民安。农工商服百业竞,高铁专列十国连。北京坐控九州稳,南宁繁华友谊关,东海巨舰巡宝岛,西疆戈壁大油田编辑
- 跨过逆境,海阔天空
太湖晨风
未来是未知的,感觉每一年的经历也是不同的。新冠肺炎疫情一直还在,偶有病例,就会采取严格的防控措施,每个人或多或少都会受到影响。南京浦口机场发现病例,最近河南又有暴雨灾害。或许每一年都是都不容易,每一年都很艰难。我们仿佛一直在奔跑,我们一直在路上,只愿跨过一个个逆境,遇见春暖花开,海阔天空。
- Istio pilot-discovery服务发现源码解析(1.13版本)
xidianjiapei001
#Istioistio云原生服务发现
Istiopilot-discovery服务发现介绍工作机制初始化初始化Config控制器初始化Service控制器controller初始化NamespaceServiceNodePodPilotDiscovery各组件启动流程DiscoveryServer接收Envoy的gRPC连接请求流程Config变化后向Envoy推送更新的流程总结参考介绍IstioPilot的代码分为Pilot-Dis
- 2018年12月23日 星期日 晴
刘一鸣妈妈
早晨舒舒服服睡个懒觉,睁开眼已经快八点了。简单洗漱之后,准备吃早饭。嫂子给煎的牛排,七成熟,孩子吃的津津有味。我只能吃十二分熟的,可以外焦,不要里嫩。早饭后到世纪金源给然然选照片,几番挣扎后忍痛割爱删掉近百张,最后只保留三十张做相册。下午然然继续拍一套影楼赠送的台历照片,商家看到我带着孩子,也赠送了一套作为体验。拍照的过程特别欢乐,孩子很享受穿着帅气的衣服摆出帅帅的动作。然然拍过一套照片后明显找到
- 2022-05-25
lzjkqdgw
党员冲在前,守好疫情防控“第一线”疫情就是命令,防控就是责任。面对新型冠状病毒感染的肺炎疫情蔓延的形势,党员应该发挥好的先锋模范作用,团结带领广大人民群众全面落实联防联控措施,让党旗在防控疫情斗争第一线高高飘扬。带头冲锋在前,充分展现党员先锋本色。一个党员就是一面旗帜,一个支部就是一个堡垒。面对日益严峻的疫情防控势态,广大党员干部要牢记嘱托,充分发挥先锋模范作用,争当先锋、勇作表率,在群众最需要的
- Hadoop架构
henan程序媛
hadoop大数据分布式
一、案列分析1.1案例概述现在已经进入了大数据(BigData)时代,数以万计用户的互联网服务时时刻刻都在产生大量的交互,要处理的数据量实在是太大了,以传统的数据库技术等其他手段根本无法应对数据处理的实时性、有效性的需求。HDFS顺应时代出现,在解决大数据存储和计算方面有很多的优势。1.2案列前置知识点1.什么是大数据大数据是指无法在一定时间范围内用常规软件工具进行捕捉、管理和处理的大量数据集合,
- 2023-05-11 关于科研
姐弟的老师妈妈
越来越觉得,科研并没有想象中那么难。为何呢?科研的过程不难。随着对科研的进一步深入了解发现:科研其实就是将自己在工作中遇到的问题——解决问题的方法、过程——问题解决后的收获做一个完整的记录。这其实是我们在工作中一直都在做的事情。科研过程的记录难。用最少的字表达清楚自己的想法,应该是科研成果能够称得上是成果,并可能被推广的精髓所在。从提出问题开始:科研题目就是明确的方向——让自己和旁人都能通过看见题
- 香蕉奶茶│香蕉和奶茶的婚礼_茗趣一刻 • 茶#饮品
阿泰随笔记
小时候很喜爱吃香蕉糕,但现在已经很难买到了,现在偶尔能买到香蕉蛋糕,但也不是经常能买到的,这叫香蕉控怎么办?解决办法来了。喜欢香蕉的朋友们,有没有想过当香蕉遇上牛奶和红茶会是什么味道?今天介绍的这款香蕉奶茶,是香蕉和奶茶的完美结合,你打算参加这场婚礼吗?学懂了这款冬日暖饮后,你就可以在新年趴中一展身手了。【材料用量】【作法】1、将香蕉去皮切片,和200ml牛奶、100ml热饮用水一起放入奶锅中小火
- Kubernetes 自定义控制器开发
IT回忆录
Kubeneteskubernetes
目录前言一、CRD二、创建数据库表(Mysql)二、控制器开发1.使用kubernetes的examplecontroller模板2.在controller.go中新增数据表监听方法3.修改tools工具生成资源对象结构体定义这里记录开发k8s控制器的一般方式,controller开发主要使用k8s提供的client-go库进行。前言Controller监听集群内部资源对象的变化,编辑资源对象(增
- Kubernetes Ingress 控制器(Nginx)安装与使用教程
农优影
KubernetesIngress控制器(Nginx)安装与使用教程kubernetes-ingressNGINXandNGINXPlusIngressControllersforKubernetes项目地址:https://gitcode.com/gh_mirrors/ku/kubernetes-ingress1.项目目录结构及介绍在nginxinc/kubernetes-ingress仓库中,
- 2. 变量和指令(omron 机器自动化控制器)——2
一半不眠次日si记
OMRONNJ/NX系列PLC指令基准手册自动化运维
机器自动化控制器——第二章变量和指令22-2指令一览通用指令轴指令轴组指令2-3PDO映射必需对象▶伺服轴▶编码器轴不同指令的设定对象▶伺服轴▶编码器轴2-2指令一览运动控制指令分为以下3种。种类概要通用指令MC功能模块通用指令轴指令MC功能模块执行单轴控制的指令轴组指令MC功能模块执行多轴协调控制的指令通用指令的详情参阅“第5章通用指令”,轴指令的详情参阅“第3章轴指令”,轴组的详情参阅“第4章
- 2. 变量和指令(omron 机器自动化控制器)——1
一半不眠次日si记
OMRONNJ/NX系列PLC指令基准手册自动化运维
机器自动化控制器——第二章变量和指令12-1变量一览表MC通用变量轴变量▶轴组变量运动控制指令的输入变量输入变量的有效范围▶枚举体一览表运动控制指令的输出变量运动控制指令的输入输出变量2-1变量一览表MC功能模块使用的变量分为两类。一类是监视轴等的状态及部分参数设定内容的系统定义变量。MC功能模块使用的系统定义变量被称作运动控制系统变量。还有一类是运动控制指令将指令的自变量作为输入接收、将指令的执
- 女性在婚姻中不能放弃自我成长
谢家牛牛
我们不得不承认,婚姻有时候是很现实和很功利的。势均力敌才能并肩而行,共同进步才能举案齐眉。“我喜欢你,是因为你身上有一种很美好的东西。”,“我开始讨厌你,也是因为你身上的美好一点点消散。”是啊,喜欢时,爱你爱得无可救药,不喜欢时,就要一拍两散。婚姻中的双方,如果有一方不懂得自我成长,跟不上对方前进的步伐,导致婚姻中的二人步调不一致,那他俩的婚姻状况就会变得令人堪忧。眼见我事业一路高升,你却越来越安
- 《相面天师》第六百四十三章 死在你前面
先峰老师
说实话,安东尼马库斯的进攻套路虽然很简单,来来去去就是左右腿的侧踢。但是经过千万次的训练,安东尼马库斯已经将这扫腿练得炉火纯青,就是这简单的侧踢,最少带给李尚鸿三次以上致命的威胁。交战了大约有七八分钟的时间了,安东尼马库斯时而像是西伯利亚的猛虎,大开大合硬拼硬打,时而又像是狐狸一般,数次都逃过了李尚鸿的致命一击。虽然也对安东尼马库斯造成了一些伤害,但至今为止,李尚鸿也未能找到一击毙敌的机会,可是眼
- 【原创小说】总是东风错丨第十三章
郭勒的鱼
郑重声明:文章系原创非首发,首发平台:头条号,ID:郭勒的鱼,文责自负。天刚亮,府外面一片嘈杂,门被拍的山响,这一夜苏府惊魂,人们吓得如同惊弓之鸟,听到这敲门声,连苏福都不敢贸然开门。趴在门缝往外一看,是大太太的哥哥舅姥爷虞南基来了,连忙着人开门,不但是虞南基来了,还领来一队三十多个全副武装的士兵。南竹看着哥哥。嘴扁了扁,蓦然鼻子一酸哭得泣不成声,虞南基很诧异。他这个妹妹他了解,外表的柔婉其实都是
- 感恩38天--幸福来得突然
金莉聊家庭育儿
每每看到优美的词语,总是在潜意识中不断强化记忆,可能总喜欢或者向住美好的事物。当心中放下很多的时候,发现自己的内心变得柔软。当学会不断感恩的时候,发现自己时常是有落泪的冲动!当自己无法去把控太多事的时候,发现自己能时时警醒自己活在当下!当自己每天去做自己最喜欢的时候,发现自己现在好事不断!世上没有白走路的,更没有白读的书。我相信每天不断记录自己的心路历程。多年后我会感谢现在不断精时逼自己奋斗的自己
- java责任链模式
3213213333332132
java责任链模式村民告县长
责任链模式,通常就是一个请求从最低级开始往上层层的请求,当在某一层满足条件时,请求将被处理,当请求到最高层仍未满足时,则请求不会被处理。
就是一个请求在这个链条的责任范围内,会被相应的处理,如果超出链条的责任范围外,请求不会被相应的处理。
下面代码模拟这样的效果:
创建一个政府抽象类,方便所有的具体政府部门继承它。
package 责任链模式;
/**
*
- linux、mysql、nginx、tomcat 性能参数优化
ronin47
一、linux 系统内核参数
/etc/sysctl.conf文件常用参数 net.core.netdev_max_backlog = 32768 #允许送到队列的数据包的最大数目
net.core.rmem_max = 8388608 #SOCKET读缓存区大小
net.core.wmem_max = 8388608 #SOCKET写缓存区大
- php命令行界面
dcj3sjt126com
PHPcli
常用选项
php -v
php -i PHP安装的有关信息
php -h 访问帮助文件
php -m 列出编译到当前PHP安装的所有模块
执行一段代码
php -r 'echo "hello, world!";'
php -r 'echo "Hello, World!\n";'
php -r '$ts = filemtime("
- Filter&Session
171815164
session
Filter
HttpServletRequest requ = (HttpServletRequest) req;
HttpSession session = requ.getSession();
if (session.getAttribute("admin") == null) {
PrintWriter out = res.ge
- 连接池与Spring,Hibernate结合
g21121
Hibernate
前几篇关于Java连接池的介绍都是基于Java应用的,而我们常用的场景是与Spring和ORM框架结合,下面就利用实例学习一下这方面的配置。
1.下载相关内容: &nb
- [简单]mybatis判断数字类型
53873039oycg
mybatis
昨天同事反馈mybatis保存不了int类型的属性,一直报错,错误信息如下:
Caused by: java.lang.NumberFormatException: For input string: "null"
at sun.mis
- 项目启动时或者启动后ava.lang.OutOfMemoryError: PermGen space
程序员是怎么炼成的
eclipsejvmtomcatcatalina.sheclipse.ini
在启动比较大的项目时,因为存在大量的jsp页面,所以在编译的时候会生成很多的.class文件,.class文件是都会被加载到jvm的方法区中,如果要加载的class文件很多,就会出现方法区溢出异常 java.lang.OutOfMemoryError: PermGen space.
解决办法是点击eclipse里的tomcat,在
- 我的crm小结
aijuans
crm
各种原因吧,crm今天才完了。主要是接触了几个新技术:
Struts2、poi、ibatis这几个都是以前的项目中用过的。
Jsf、tapestry是这次新接触的,都是界面层的框架,用起来也不难。思路和struts不太一样,传说比较简单方便。不过个人感觉还是struts用着顺手啊,当然springmvc也很顺手,不知道是因为习惯还是什么。jsf和tapestry应用的时候需要知道他们的标签、主
- spring里配置使用hibernate的二级缓存几步
antonyup_2006
javaspringHibernatexmlcache
.在spring的配置文件中 applicationContent.xml,hibernate部分加入
xml 代码
<prop key="hibernate.cache.provider_class">org.hibernate.cache.EhCacheProvider</prop>
<prop key="hi
- JAVA基础面试题
百合不是茶
抽象实现接口String类接口继承抽象类继承实体类自定义异常
/* * 栈(stack):主要保存基本类型(或者叫内置类型)(char、byte、short、 *int、long、 float、double、boolean)和对象的引用,数据可以共享,速度仅次于 * 寄存器(register),快于堆。堆(heap):用于存储对象。 */ &
- 让sqlmap文件 "继承" 起来
bijian1013
javaibatissqlmap
多个项目中使用ibatis , 和数据库表对应的 sqlmap文件(增删改查等基本语句),dao, pojo 都是由工具自动生成的, 现在将这些自动生成的文件放在一个单独的工程中,其它项目工程中通过jar包来引用 ,并通过"继承"为基础的sqlmap文件,dao,pojo 添加新的方法来满足项
- 精通Oracle10编程SQL(13)开发触发器
bijian1013
oracle数据库plsql
/*
*开发触发器
*/
--得到日期是周几
select to_char(sysdate+4,'DY','nls_date_language=AMERICAN') from dual;
select to_char(sysdate,'DY','nls_date_language=AMERICAN') from dual;
--建立BEFORE语句触发器
CREATE O
- 【EhCache三】EhCache查询
bit1129
ehcache
本文介绍EhCache查询缓存中数据,EhCache提供了类似Hibernate的查询API,可以按照给定的条件进行查询。
要对EhCache进行查询,需要在ehcache.xml中设定要查询的属性
数据准备
@Before
public void setUp() {
//加载EhCache配置文件
Inpu
- CXF框架入门实例
白糖_
springWeb框架webserviceservlet
CXF是apache旗下的开源框架,由Celtix + XFire这两门经典的框架合成,是一套非常流行的web service框架。
它提供了JAX-WS的全面支持,并且可以根据实际项目的需要,采用代码优先(Code First)或者 WSDL 优先(WSDL First)来轻松地实现 Web Services 的发布和使用,同时它能与spring进行完美结合。
在apache cxf官网提供
- angular.equals
boyitech
AngularJSAngularJS APIAnguarJS 中文APIangular.equals
angular.equals
描述:
比较两个值或者两个对象是不是 相等。还支持值的类型,正则表达式和数组的比较。 两个值或对象被认为是 相等的前提条件是以下的情况至少能满足一项:
两个值或者对象能通过=== (恒等) 的比较
两个值或者对象是同样类型,并且他们的属性都能通过angular
- java-腾讯暑期实习生-输入一个数组A[1,2,...n],求输入B,使得数组B中的第i个数字B[i]=A[0]*A[1]*...*A[i-1]*A[i+1]
bylijinnan
java
这道题的具体思路请参看 何海涛的微博:http://weibo.com/zhedahht
import java.math.BigInteger;
import java.util.Arrays;
public class CreateBFromATencent {
/**
* 题目:输入一个数组A[1,2,...n],求输入B,使得数组B中的第i个数字B[i]=A
- FastDFS 的安装和配置 修订版
Chen.H
linuxfastDFS分布式文件系统
FastDFS Home:http://code.google.com/p/fastdfs/
1. 安装
http://code.google.com/p/fastdfs/wiki/Setup http://hi.baidu.com/leolance/blog/item/3c273327978ae55f93580703.html
安装libevent (对libevent的版本要求为1.4.
- [强人工智能]拓扑扫描与自适应构造器
comsci
人工智能
当我们面对一个有限拓扑网络的时候,在对已知的拓扑结构进行分析之后,发现在连通点之后,还存在若干个子网络,且这些网络的结构是未知的,数据库中并未存在这些网络的拓扑结构数据....这个时候,我们该怎么办呢?
那么,现在我们必须设计新的模块和代码包来处理上面的问题
- oracle merge into的用法
daizj
oraclesqlmerget into
Oracle中merge into的使用
http://blog.csdn.net/yuzhic/article/details/1896878
http://blog.csdn.net/macle2010/article/details/5980965
该命令使用一条语句从一个或者多个数据源中完成对表的更新和插入数据. ORACLE 9i 中,使用此命令必须同时指定UPDATE 和INSE
- 不适合使用Hadoop的场景
datamachine
hadoop
转自:http://dev.yesky.com/296/35381296.shtml。
Hadoop通常被认定是能够帮助你解决所有问题的唯一方案。 当人们提到“大数据”或是“数据分析”等相关问题的时候,会听到脱口而出的回答:Hadoop! 实际上Hadoop被设计和建造出来,是用来解决一系列特定问题的。对某些问题来说,Hadoop至多算是一个不好的选择,对另一些问题来说,选择Ha
- YII findAll的用法
dcj3sjt126com
yii
看文档比较糊涂,其实挺简单的:
$predictions=Prediction::model()->findAll("uid=:uid",array(":uid"=>10));
第一个参数是选择条件:”uid=10″。其中:uid是一个占位符,在后面的array(“:uid”=>10)对齐进行了赋值;
更完善的查询需要
- vim 常用 NERDTree 快捷键
dcj3sjt126com
vim
下面给大家整理了一些vim NERDTree的常用快捷键了,这里几乎包括了所有的快捷键了,希望文章对各位会带来帮助。
切换工作台和目录
ctrl + w + h 光标 focus 左侧树形目录ctrl + w + l 光标 focus 右侧文件显示窗口ctrl + w + w 光标自动在左右侧窗口切换ctrl + w + r 移动当前窗口的布局位置
o 在已有窗口中打开文件、目录或书签,并跳
- Java把目录下的文件打印出来
蕃薯耀
列出目录下的文件文件夹下面的文件目录下的文件
Java把目录下的文件打印出来
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年7月11日 11:02:
- linux远程桌面----VNCServer与rdesktop
hanqunfeng
Desktop
windows远程桌面到linux,需要在linux上安装vncserver,并开启vnc服务,同时需要在windows下使用vnc-viewer访问Linux。vncserver同时支持linux远程桌面到linux。
linux远程桌面到windows,需要在linux上安装rdesktop,同时开启windows的远程桌面访问。
下面分别介绍,以windo
- guava中的join和split功能
jackyrong
java
guava库中,包含了很好的join和split的功能,例子如下:
1) 将LIST转换为使用字符串连接的字符串
List<String> names = Lists.newArrayList("John", "Jane", "Adam", "Tom");
- Web开发技术十年发展历程
lampcy
androidWeb浏览器html5
回顾web开发技术这十年发展历程:
Ajax
03年的时候我上六年级,那时候网吧刚在小县城的角落萌生。传奇,大话西游第一代网游一时风靡。我抱着试一试的心态给了网吧老板两块钱想申请个号玩玩,然后接下来的一个小时我一直在,注,册,账,号。
彼时网吧用的512k的带宽,注册的时候,填了一堆信息,提交,页面跳转,嘣,”您填写的信息有误,请重填”。然后跳转回注册页面,以此循环。我现在时常想,如果当时a
- 架构师之mima-----------------mina的非NIO控制IOBuffer(说得比较好)
nannan408
buffer
1.前言。
如题。
2.代码。
IoService
IoService是一个接口,有两种实现:IoAcceptor和IoConnector;其中IoAcceptor是针对Server端的实现,IoConnector是针对Client端的实现;IoService的职责包括:
1、监听器管理
2、IoHandler
3、IoSession
- ORA-00054:resource busy and acquire with NOWAIT specified
Everyday都不同
oraclesessionLock
[Oracle]
今天对一个数据量很大的表进行操作时,出现如题所示的异常。此时表明数据库的事务处于“忙”的状态,而且被lock了,所以必须先关闭占用的session。
step1,查看被lock的session:
select t2.username, t2.sid, t2.serial#, t2.logon_time
from v$locked_obj
- javascript学习笔记
tntxia
JavaScript
javascript里面有6种基本类型的值:number、string、boolean、object、function和undefined。number:就是数字值,包括整数、小数、NaN、正负无穷。string:字符串类型、单双引号引起来的内容。boolean:true、false object:表示所有的javascript对象,不用多说function:我们熟悉的方法,也就是
- Java enum的用法详解
xieke90
enum枚举
Java中枚举实现的分析:
示例:
public static enum SEVERITY{
INFO,WARN,ERROR
}
enum很像特殊的class,实际上enum声明定义的类型就是一个类。 而这些类都是类库中Enum类的子类 (java.l
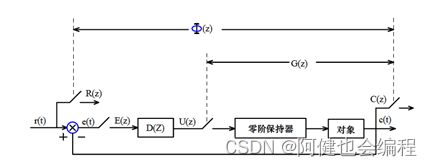
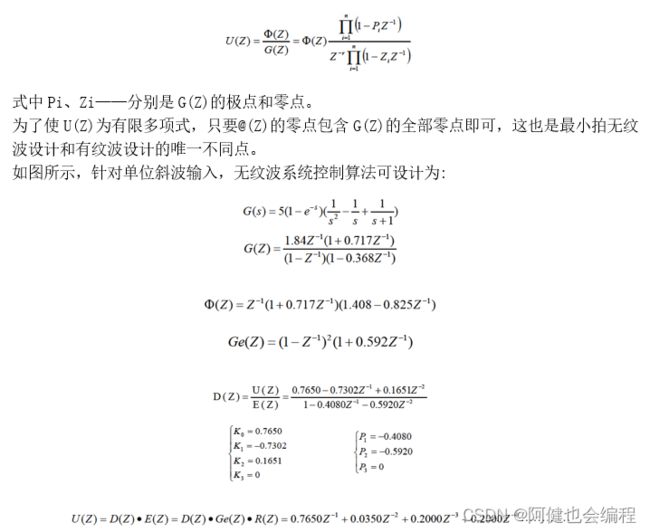
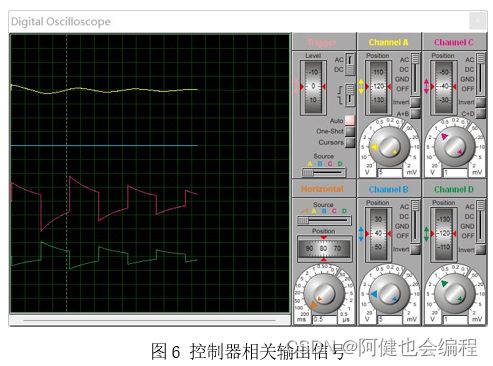
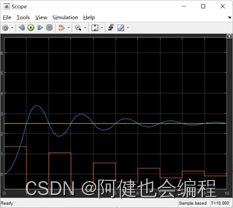
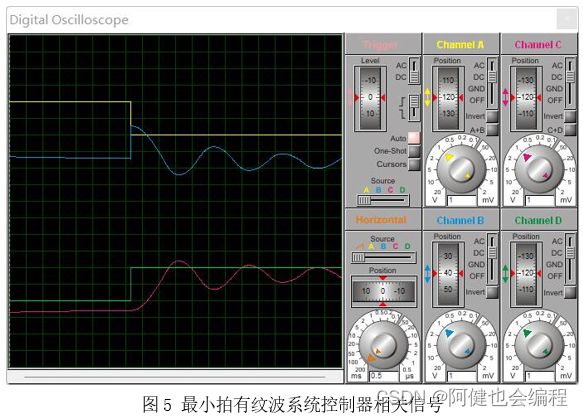 黄线:偏差信号
黄线:偏差信号