【Linux】进程间通信(1)——匿名管道
文章目录
- 前言
- 进程间通信的目的
- 进程间通信的发展
- 进程间通信分类
- 管道
-
- 什么是管道?
- 站在内核角度-管道本质
- 匿名管道pipe函数
- 管道的特点(重要)
- 用fork来共享管道原理
- 匿名管道的使用步骤
- 管道的读写规则
- 管道的四种场景
- 如何使用管道进行进程间通信?
-
- makefile
- Task.hpp
- ctrlPipe.cc
前言
之前所学的进程,一般进程和进程之间是独立的关系,最多产生一些耦合,比如父进程创建子进程,父进程等待子进程等等。但实际在很多问题上进程和进程之间是需要相互协同的,那么进程间通信就是在不同进程之间传播或交换信息,接下来让我们一起走进进程间通信的大门!
进程间通信的目的
- 数据传输:一个进程需要将它的数据发送给另一个进程。
- 资源共享:多个进程之间共享同样的资源。
- 通知事件:一个进程需要向另一个或一组进程发送消息,通知它们发送了某种事件(如子进程终止时要通知父进程)。
- 进程控制:有些进程希望完全控制另一个进程的执行(如debug调试进程),此时控制进程希望能够拦截另一个进程的所有陷入和异常,并能够及时直到它的状态改变。
可以形象理解成:两个人之间互相打电话,不管你们的目的是什么,是A打电话给B,叫他拿外套(进程控制),还是A通知B,今天晚上要开会(通知事件),本质都要“打电话”。
进程间通信的发展
- 管道
- System V进程间通信(可以实现本地通信)
- POSIX进程间通信(可以实现跨网络通信)
进程间通信分类
管道:
- 匿名管道pipe
- 命名管道
System V IPC:
- System V 消息队列
- System V 共享内存
- System V 信号量
POSIX IPC:
- 消息队列
- 共享内存
- 信号量
- 互斥量
- 条件变量
- 读写锁
任何进程通信的手段:
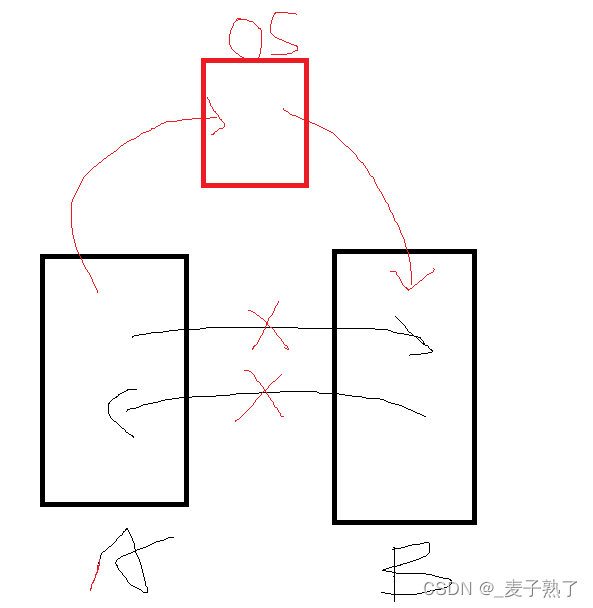
- 想办法,先让不同的进程,看到同一份资源(这一步至关重要)!!!
- 让一方写入,一方读取完成通信的过程,至于,通信的目的和后续的工作,要结合具体场景。
- 不能说让A进程在它的内存中开辟一块空间,让B进程可以访问,因为这样就破坏了进程之间具有独立性这一说。抽象如图:
管道
什么是管道?
- 管道是Unix中最古老的进程间通信的形式。
- 我们把一个进程连接到另一个进程的一个数据流称为一个“管道”。
- 其本质是一个伪文件(管道实为内核使用环形队列机制,借助内核缓冲区4k实现);

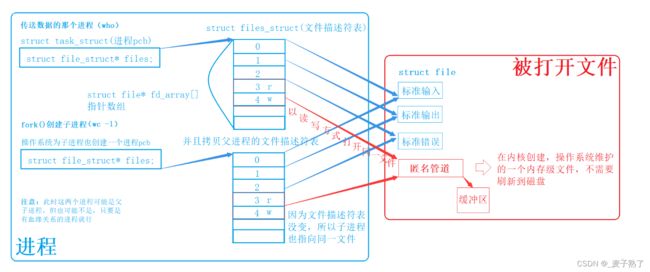
其中,who命令和wc命令都是两个程序,当它们运行起来后就变成了两个进程,who进程通过标准输出将数据打到“管道”当中,wc进程再通过标准输入从“管道”当中读取数据,至此便完成了数据的传输,who命令用于查看当前云服务器的登录用户(一行显示一个用户),wc -l是计算行数的一个命令,说明当前只有一个用户在线,

站在内核角度-管道本质
匿名管道pipe函数
pipe函数用于创建匿名管道,pipe函数的函数原型如下:
int pipe(int pipefd[2]);
pipe函数的参数是一个输出型参数,所以用户需要定义两个数组,并传过来,数组pipefd用于返回两个指向管道读端和写端的文件描述符:
| 数组元素 | 代表含义 |
|---|---|
| pipefd[0] | 管道读端的文件 |
| pipefd[1] | 管道写端的文件 |
| pipe函数调用成功时返回0,调用失败时返回-1。 |

管道的特点(重要)
- 由两个文件描述符引用,一个表示读端,一个表示写端;
- 管道提供流式服务,规定数据从管道的写端流入管道,从读端流出。
- 管道是单向通信的,如果想要使用双向通信,那就创建两个管道吧;
- 管道通信,通常用来进行具有“血缘”关系的进程,进行进程间通信。常用于父子通信,因为具有了血缘关系,fork创建子进程后才能看到同一份资源—pipe函数打开管道,并不清楚管道的名字,称之为匿名管道。
- 在管道通信中,写入的次数,和读取的次数,不是严格匹配的,读写次数的多少没有强相关。——表现:面向字节流。
- 管道具有一定的协同能力,让读端和写端能够按照一定的步骤进行通信——自带同步进制。
- 一般而言,进程退出,管道就会被释放,所以管道的生命周期随进程。
- 一般而言,内核会对管道操作进行同步与互斥;
- 管道是半双工的,数据只能向一个方向流动(ps:吵架是全双工的!哈哈哈!)
用fork来共享管道原理
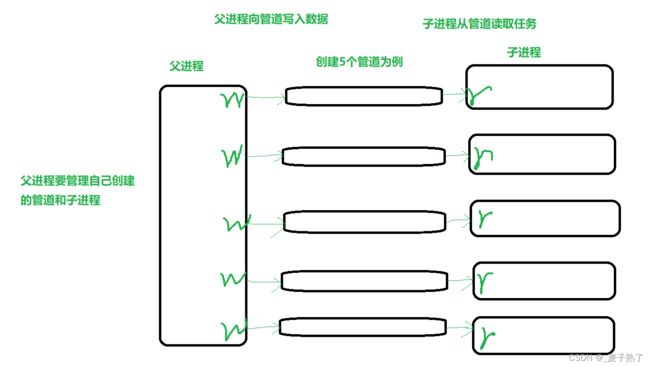
图上模拟的是子进程向管道写入数据,父进程从管道读取数据。在创建匿名管道实现父子进程间通信的过程中,需要pipe函数和fork函数搭配使用,具体步骤如下:

匿名管道的使用步骤
站在文件描述符角度-深度理解管道



所以,看待管道,就如同看待文件一样!管道的使用和文件一致,迎合了“Linux一切皆文件思想”。
管道的读写规则
-
当没有数据可读时
O_NONBLOCK disable: read调用阻塞,即进程暂停执行,一直等待有数据来为止;
O_NONBLOCK enable: read调用返回-1,errno值为EAGAIN。 -
当管道满的时候
O_NONBLOCK disable: write调用阻塞,直到有进程读走数据;
O_NONBLOCK enable: 调用返回-1,errno值为EAGAIN。 -
如果所有管道写端对应的文件描述符被关闭,则read返回0,表面读到文件结尾;
-
如果所有管道读端对应的文件描述符被关闭,则write操作会产生信号SIGPIPE,进而可能导致write进程退出。
-
当要写入的数据量不大于PIPE_BUF时,linux将保证写入的原子性(即要么全做,要么都不做)。
-
当要写入的数据量大于PIPE_BUF时,linux将不再保证写入的原子性。
管道的四种场景
- 数据一旦被读走,便不再管道中存在,不可反复读取。如果我们读取完毕了所有的管道数据,如果对方不写入,我们就只能等待。
- 如果我们写端将管道写满了,我们就不能再写了。
- 如果我关闭了写端,读取完管道数据后,再读,read就会返回0,表明读到了文件结尾。
- 如果写端一直写,读端关闭,那么写端继续写就没有意义了,OS不会维护无意义,低效率的事情,OS会杀死一直在写入的进程!通过信号来终止进程:13)SIGPIPE
下列代码演示:子进程通过写端写数据到管道,父进程读取管道数据。
实例代码:
#include如何使用管道进行进程间通信?
makefile
ctrlPipe:ctrlPipe.cc
g++ -o $@ $^ -std=c++11
.PHONY:clean
clean:
rm -rf ctrlPipe
Task.hpp
#pragma once
#include func_t;
typedef void (*fun_t)(); //函数指针
void PrintLog()
{
std::cout << "pid: "<< getpid() << ", 打印日志任务,正在被执行..." << std::endl;
}
void InsertMySQL()
{
std::cout << "执行数据库任务,正在被执行..." << std::endl;
}
void NetRequest()
{
std::cout << "执行网络请求任务,正在被执行..." << std::endl;
}
// void ExitProcess()
// {
// exit(0);
// }
//约定,每一个command都必须是4字节
#define COMMAND_LOG 0
#define COMMAND_MYSQL 1
#define COMMAND_REQEUST 2
class Task
{
public:
Task()
{
funcs.push_back(PrintLog);
funcs.push_back(InsertMySQL);
funcs.push_back(NetRequest);
}
void Execute(int command)
{
if(command >= 0 && command < funcs.size()) funcs[command]();
}
~Task()
{}
public:
std::vector<fun_t> funcs;
};
ctrlPipe.cc
#include