均值滤波及中值滤波的区别
参考 https://blog.csdn.net/cjsh_123456/article/details/79261271 进行个人附加修改
均值滤波和和中值滤波都可以起到平滑图像,滤去噪声的功能。均值滤波采用线性的方法,平均整个窗口范围内的像素值,均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。均值滤波对高斯噪声表现较好,对椒盐噪声表现较差。中值滤波采用非线性的方法,它在平滑脉冲噪声方面非常有效,同时它可以保护图像尖锐的边缘,选择适当的点来替代污染点的值,所以处理效果好,对椒盐噪声表现较好,对高斯噪声表现较差。
填充问题
在对图像应用滤波器进行过滤时,边界问题是一个需要处理的问题。一般来说,有3种处理的方法。
1. 不做边界处理
不对图像的边界作任何处理,在对图像进行滤波时,滤波器没有作用到图像的四周,因此图像的四周没有发生改变。
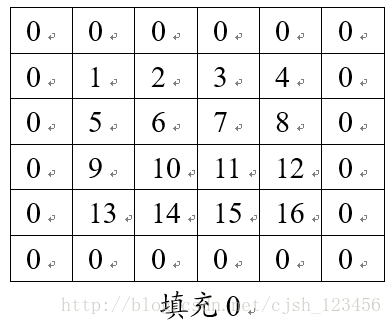
2. 填充0
对图像的边界做扩展,在扩展边界中填充0,对于边长为2k+1的方形滤波器,扩展的边界大小为k,若原来的图像为[m, n],则扩展后图像变为[m+2k, n+2k]。进行滤波之后,图像会出现一条黑色的边框。
3. 填充最近像素值
扩展与 填充0 的扩展类似,只不过填充0的扩展是在扩展部分填充0,而这个方法是填充距离最近的像素的值。

matlab代码实现
1. 均值滤波函数如下
该函数为spacelFilter,输入为需要进行滤波的图像(L = 256,像素值为0-255的灰度图像),方形滤波器(大小为2k+1,值类型为uint8),输出为经过滤波器滤波之后的图像。该函数滤波采用填充最近像素值的方法,结果图像不会出现黑边。
function [image_out] = spacelFilter(image_in, filter)
% (线性)均值滤波函数
% 输入为需要进行空间滤波的灰度图像,线性方形滤波器
% 输出为经过滤波之后的图像
% 图像边缘的填充为最近的像素值,目的是消除填充0时会出现的黑框
% 滤波器的大小为 n * n, n = 2 * k + 1, k为整数
% 输入图像大小为 m * n, 灰度图像,像素值范围为0-255,L = 256
[m, n] = size(image_in);
[mf, nf] = size(filter);
k = (mf - 1) / 2;
image2 = zeros(m+2*k, n+2*k, 'double');
image_out = zeros(m, n, 'uint8');
coeff = sum(filter(:));
% 填充部分
% 内部直接复制
for i = 1+k : m+k
for j = 1+k : n+k
image2(i, j) = image_in(i-k, j-k);
end
end
% 填充上下边缘
for i = 1 : k
for j = 1 : n
image2(i, j+k) = image_in(1, j);
image2(m+k+i, j+k) = image_in(m, j);
end
end
% 填充左右边缘
for i = 1 : m
for j = 1 : k
image2(i+k, j) = image_in(i, 1);
image2(i+k, n+k+j) = image_in(i, n);
end
end
% 填充四个角
for i = 1 : k
for j = 1 : k
image2(i, j) = image_in(1, 1); %填充左上角
image2(i, j+n+k) = image_in(1, n); %填充右上角
image2(i+n+k, j) = image_in(m, 1); %填充左下角
image2(i+n+k, j+n+k) = image_in(m, n); %填充右下角
end
end
% 滤波部分
for i = 1+k : m+k
for j = 1+k : n+k
sub_image = image2(i-k:i+k, j-k:j+k);
temp1 = double(filter') .* double(sub_image);
temp2 = sum(temp1(:)) / coeff;
image_out(i-k, j-k) = uint8(temp2);
end
end
end
2. 中值滤波器
实现与均值滤波器类似,只不过在滤波部分的实现有所不同。 % 滤波部分
for i = 1+k : m+k
for j = 1+k : n+k
sub_image = image2(i-k:i+k, j-k:j+k);
temp = median(sub_image(:));
image_out(i-k, j-k) = uint8(temp);
end
end
3. 测试代码如下
为了方便,我在spacelFilter函数中增加了中值滤波部分,增加了一个返回值,这样spacelFilter函数的返回值为[image1,image2],image1为均值滤波图像,image2为中值滤波图像。
close all;
clear all;
clc;
image = imread('2.tif');
[m, n] = size(image);
%模板大小
k = 3;
myFilter = zeros(k, k, 'uint8');
for i = 1 : k
for j = 1 : k
myFilter(i, j) = 1;
end
end
[image2, image3] = spacelFilter(image, myFilter);
image4 = medfilt2(image, [3 3]);
figure;
subplot(2, 2, 1), imshow(image), title('原图像');
subplot(2, 2, 2), imshow(image2), title('3*3均值滤波图像');
subplot(2, 2, 3), imshow(image3), title('3*3中值滤波图像');
subplot(2, 2, 4), imshow(image4), title('matlab自带的中值滤波图像');
4. 代码运行结果如下(测试图像为被椒盐噪声污染的图像):

5. 个人实现如下

main.m
f = imread('median_filter_original.jpg');
f_gray = rgb2gray(f);
f_noise = imnoise(f_gray, 'salt & pepper', 0.1);
f_med = medfilt2(f_noise, [3 3]);
% 模板大小
k = 3;
myFilter = zeros(k, k, 'uint8');
for i = 1 : k
for j = 1 : k
myFilter(i, j) = 1;
end
end
[f_mean, f_med1] = spacelFilter(f_noise, myFilter);
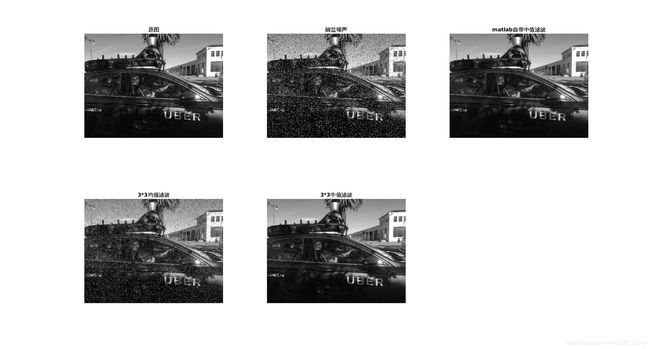
figure
subplot(2,3,1);imshow(f_gray); title('原图');
subplot(2,3,2);imshow(f_noise);title('椒盐噪声');
subplot(2,3,3);imshow(f_med); title('matlab自带中值滤波');
subplot(2,3,4);imshow(f_mean); title('3*3均值滤波');
subplot(2,3,5);imshow(f_med1); title('3*3中值滤波');
spacelFilter.m
function [image_out, image_out1] = spacelFilter(image_in, filter)
% (线性)均值滤波函数
% 输入为需要进行空间滤波的灰度图像,线性方形滤波器
% 输出为经过滤波之后的图像
% 图像边缘的填充为最近的像素值,目的是消除填充0时会出现的黑框
% 滤波器的大小为 n * n, n = 2 * k + 1, k为整数
% 输入图像大小为 m * n, 灰度图像,像素值范围为0-255,L = 256
[m, n] = size(image_in);
[mf, nf] = size(filter);
k = (mf - 1) / 2;
image2 = zeros(m+2*k, n+2*k, 'double');
image_out = zeros(m, n, 'uint8');
image_out1 = zeros(m, n, 'uint8');
coeff = sum(filter(:));
% 填充部分
% 内部直接复制
for i = 1+k : m+k
for j = 1+k : n+k
image2(i, j) = image_in(i-k, j-k);
end
end
% 填充上下边缘
for i = 1 : k
for j = 1 : n
image2(i, j+k) = image_in(1, j);
image2(m+k+i, j+k) = image_in(m, j);
end
end
% 填充左右边缘
for i = 1 : m
for j = 1 : k
image2(i+k, j) = image_in(i, 1);
image2(i+k, n+k+j) = image_in(i, n);
end
end
% 填充四个角
for i = 1 : k
for j = 1 : k
image2(i, j) = image_in(1, 1); %填充左上角
image2(i, j+n+k) = image_in(1, n); %填充右上角
image2(i+n+k, j) = image_in(m, 1); %填充左下角
image2(i+n+k, j+n+k) = image_in(m, n); %填充右下角
end
end
% 均值滤波部分
for i = 1+k : m+k
for j = 1+k : n+k
sub_image = image2(i-k:i+k, j-k:j+k);
temp1 = double(filter') .* double(sub_image);
temp2 = sum(temp1(:)) / coeff;
image_out(i-k, j-k) = uint8(temp2);
end
end
% 中值滤波部分
for i = 1+k : m+k
for j = 1+k : n+k
sub_image = image2(i-k:i+k, j-k:j+k);
temp = median(sub_image(:));
image_out1(i-k, j-k) = uint8(temp);
end
end
end
结果如下