乘法器介绍
阵列乘法器
实现乘法的比较常用的方法是类似与手工计算乘法的方式:
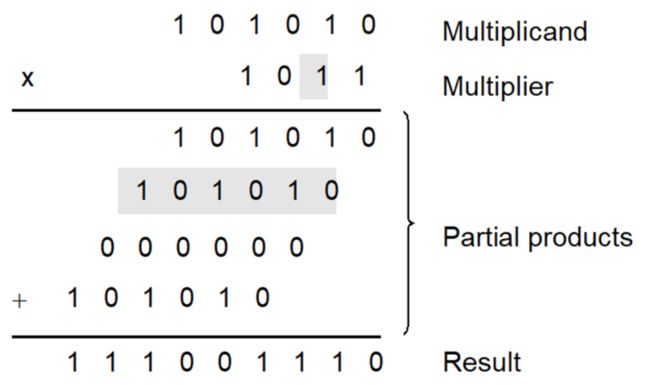
对应的硬件结构就是阵列乘法器(array multiplier)它有三个功能:产生部分积,累加部分积和最终相加。
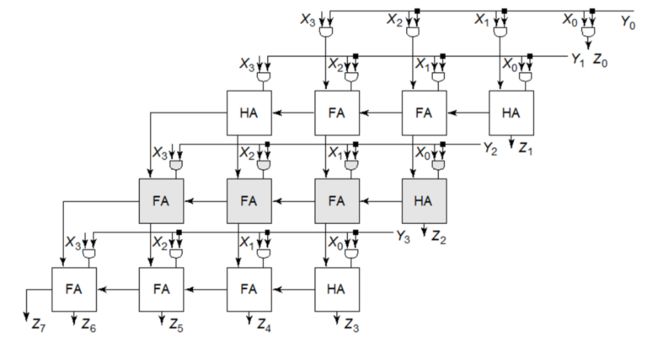
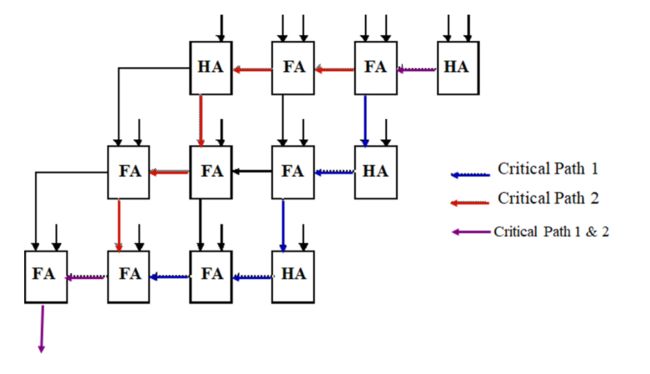
阵列乘法器的关键路径为(下图标出了两条可能的关键路径):
假设乘数为N,被乘数为M。则上面的乘法器产生N个部分积,乘法位数为M,则需要N×M个二输入AND门以及N−1个M位加法器。可以得到关键路径延时为:
t m u l t = [ ( M − 1 ) + ( N − 2 ) ] t c a r r y + ( N − 1 ) t s u m + t a n d t_{mult}=[(M−1)+(N−2)]t_{carry}+(N−1)t_{sum}+t_{and} tmult=[(M−1)+(N−2)]tcarry+(N−1)tsum+tand
进位保留乘法器
背景:由于阵列乘法器中有许多几乎一样的关键路径,因此通过调整晶体管的尺寸来提高性能效果有限。
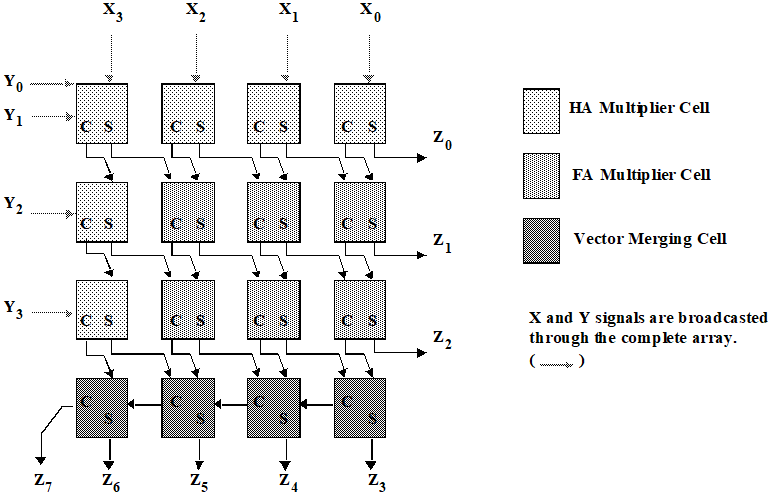
解决:进位输出可以沿着对角线传播而不是向左传递,这样传播并不改变结果,只需要加入额外的一排加法器(向量合并加法器vector-merging)来产生最终的结果。这样的乘法器叫做进位保留乘法器:

其关键路径为图中灰色部分,且只有一条。 其传播延时为:
t m u l t = t a n d + ( N − 1 ) t c a r r y + t m e r g e t_{mult}=t_{and}+(N−1)t_{carry}+t_{merge} tmult=tand+(N−1)tcarry+tmerge
可见,相比于阵列乘法器,进位保留乘法器增加了部分面积,但关键路径唯一确定。
下图是进位保留加法器的布图(floorplan)结构。其规整的结构适合自动化生成。
树形乘法器
部分积的求和加法器可以安排为树形以减少关键路径和减少加法器。其中两个点的是半加器,三个点的是全加器。其压缩过程可以分为下面几步:


可见,前面的两部只需要三个半加器和三个全加器,最后一步是简单的加法器链。只比较前面部分的话,进位保留加法器的前面部分需要6个全加器和6个半加器!优点:除了节省乘法器需要的硬件,Wallace树形乘法器也可以减少传播延时,其延时 O ( l o g 1.5 ( N ) ) O(log_{1.5}(N)) O(log1.5(N))。
缺点: 非常不规则,版图设计复杂。
Booth乘法器
假设A和B是乘数和被乘数,且有:
A = a n − 1 a n − 2 … a 1 a 0 B = b n − 1 b n − 2 … b 1 b 0 A ∗ B = ( 0 − a 0 ) × B × 2 0 + ( a 0 − a 1 ) × B × 2 1 + ( a 1 − a 2 ) × B × 2 2 + ⋯ + ( a n − 2 − a n − 1 ) × B × 2 n − 1 = B × [ − a n − 1 × 2 n − 1 + ∑ i = 0 n − 2 a i × 2 i ] = B × V a l ( A ) \begin{align}A&=a_{n−1}a_{n−2}…a_1a_0 \\ B&=b_{n−1}b_{n−2}…b_1b_0 \\ A*B&=(0−a_0)×B×2^0+(a_0−a_1)×B×2^1+\\&(a_1−a_2)×B×2^2+⋯+(a_{n−2}−a_{n−1})×B×2^n−1\\ &=B×[−a_{n−1}×2^{n−1}+∑_{i=0}^{n−2}a_i×2^i]\\&=B×Val(A)\end{align} ABA∗B=an−1an−2…a1a0=bn−1bn−2…b1b0=(0−a0)×B×20+(a0−a1)×B×21+(a1−a2)×B×22+⋯+(an−2−an−1)×B×2n−1=B×[−an−1×2n−1+i=0∑n−2ai×2i]=B×Val(A)
上述是以补码形式进行的
上面的公式推导了booth乘法对乘数的分解原理,实际上在编码时只需要公式3,可以做如下的编码表:
| a i a_i ai | a i − 1 a_{i−1} ai−1 | a i − 1 − a i a_{i−1}−a_i ai−1−ai | 操作 |
|---|---|---|---|
| 0 | 0 | 0 | +0,右移一位 |
| 1 | 0 | -1 | 减B,右移一位 |
| 1 | 1 | 0 | +0,右移一位 |
| 0 | 1 | 1 | 加B,右移一位 |
例: N = 7 , B = 22 = ( 0010110 ) 2 , A = − 34 = − ( 0100010 ) 2 N=7,B=22=(0010110)_2,A=−34=−(0100010)_2 N=7,B=22=(0010110)2,A=−34=−(0100010)2
首先计算-B的补码(算法中要用到): − B ‾ = ( 1101010 ) 2 \overline{−B}=(1101010)_2 −B=(1101010)2以及A的补码: A ‾ = ( 1011110 ) 2 \overline{A}=(1011110)_2 A=(1011110)2
硬件计算过程如下:

1、被乘数B与乘数A均以补码的形式参加乘法运算,运算结果是积的补码 。
2、部分积和被乘数B采用双符号位,乘数A采用单符号位 。
3、初始部分积为0。运算前,在乘数A的补码末位添加一位附加位An+1,初始值为0 。
4、根据AnAn+1的值,按照上表进行累加右移操作,右移时遵循补码的移位规则 。
5、累加n+1次,右移n次,最后一次不右移 。
6、实际上,对于公式中的每一项 ( a i − 1 − a i ) × B × 2 i (a_{i−1}−a_i)×B×2^i (ai−1−ai)×B×2i都对应实际算法中的每一步。 ( a i − 1 − a i ) (a_{i−1}−a_i) (ai−1−ai)决定了B的系数,右移操作因为作用在[A][Q]寄存器上,所以实际上是相当于将积右移,等价于B左移,所以这一步对应 × 2 i ×2^i ×2i操作。加减B的操作都作用在[A]寄存器上,保证了 × 2 i ×2^i ×2i后的B能够作用在正确的位上。
基2booth乘法器设计
`timescale 1ns/1ps
module booth_fsm
# (parameter DATAWIDTH = 8)
(
input clk,
input rstn,
input en,
input [DATAWIDTH-1:0] multiplier,
input [DATAWIDTH-1:0] multiplicand,
output reg done,
output reg [2*DATAWIDTH-1:0] product
);
parameter IDLE = 2'b00,
ADD = 2'b01,
SHIFT = 2'b11,
OUTPUT = 2'b10;
reg [1:0] current_state, next_state; // state registers.
reg [2*DATAWIDTH+1:0] a_reg,s_reg,p_reg,sum_reg; // computational values.
reg [DATAWIDTH-1:0] iter_cnt; // iteration count for determining when done.
wire [DATAWIDTH:0] multiplier_neg; // negative value of multiplier
always @(posedge clk or negedge rstn)
if (!rstn) current_state = IDLE;
else current_state <= next_state;
// state transform
always @(*) begin
next_state = 2'bx;
case (current_state)
IDLE : if (en) next_state = ADD;
else next_state = IDLE;
ADD : next_state = SHIFT;
SHIFT : if (iter_cnt==DATAWIDTH) next_state = OUTPUT;
else next_state = ADD;
OUTPUT: next_state = IDLE;
endcase
end
// negative value of multiplier.
assign multiplier_neg = -{multiplier[DATAWIDTH-1],multiplier};
// algorithm implemenation details.
always @(negedge clk or negedge rstn) begin
if (!rstn) begin
{a_reg,s_reg,p_reg,iter_cnt,done,sum_reg,product} <= 0;
end else begin
case (current_state)
IDLE : begin
a_reg <= {multiplier[DATAWIDTH-1],multiplier,{(DATAWIDTH+1){1'b0}}};
s_reg <= {multiplier_neg,{(DATAWIDTH+1){1'b0}}};
p_reg <= {{(DATAWIDTH+1){1'b0}},multiplicand,1'b0};
iter_cnt <= 0;
done <= 1'b0;
end
ADD : begin
case (p_reg[1:0])
2'b01 : sum_reg <= p_reg+a_reg; // + multiplier
2'b10 : sum_reg <= p_reg+s_reg; // - multiplier
2'b00,2'b11 : sum_reg <= p_reg; // nop
endcase
iter_cnt <= iter_cnt + 1;
end
SHIFT : begin
p_reg <= {sum_reg[2*DATAWIDTH+1],sum_reg[2*DATAWIDTH+1:1]}; // right shift
end
OUTPUT : begin
product <= p_reg[2*DATAWIDTH:1];
done <= 1'b1;
end
endcase
end
end
endmodule
testbench:
`timescale 1ns/1ps
// Basic exhaustive self checking test bench.
`define TEST_WIDTH 10
module booth_fsm_tb;
reg clk;
reg rstn;
reg en;
//integer multiplier1;
//integer multiplicand1;
reg [`TEST_WIDTH-1:0] multiplier;
reg [`TEST_WIDTH-1:0] multiplicand;
wire done;
//输入 :要定义有符号和符号,输出:无要求
wire signed [2*`TEST_WIDTH-1:0] product;
wire signed [`TEST_WIDTH-1:0] m1_in;
wire signed [`TEST_WIDTH-1:0] m2_in;
reg signed [2*`TEST_WIDTH-1:0] product_ref;
reg [2*`TEST_WIDTH-1:0] product_ref_u;
assign m1_in = multiplier[`TEST_WIDTH-1:0];
assign m2_in = multiplicand[`TEST_WIDTH-1:0];
booth_fsm #(.DATAWIDTH(`TEST_WIDTH)) booth
(
.clk(clk),
.rstn(rstn),
.en(en),
.multiplier(multiplier),
.multiplicand(multiplicand),
.done (done),
.product(product)
);
always #1 clk = ~clk;
integer num_good;
integer i;
initial begin
clk = 1;
en = 0;
rstn = 1;
#2 rstn = 0; #2 rstn = 1;
num_good = 0;
multiplier=0;
multiplicand=0;
#8;
for(i=0;i<4;i=i+1) begin
en = 1;
multiplier=10'b10000_00000+i;
multiplicand=10'b00000_00010+i;
wait (done == 0);
wait (done == 1);
product_ref=m1_in*m2_in;
product_ref_u=m1_in*m2_in;
if (product_ref !== product)
$display("multiplier = %d multiplicand = %d proudct =%d",m1_in,m2_in,product);
@(posedge clk);
end
$display("sim done. num good = %d",num_good);
end
initial begin
$fsdbDumpfile("tb.fsdb");
$fsdbDumpvars();
$fsdbDumpMDA();
$dumpvars();
#1000 $finish;
end
endmodule
仿真波形:
