DS数据结构--求到各顶点的最短路径(迪杰斯特拉算法)
目录
1.引言
求最小路径这个算法我觉得是难度比较大的了,主要是它的思路比较抽象复杂,不好理解
其实它的思路和prim算法比较接近,要是有学过prim算法的话会更好地理解迪杰斯特拉算法。
2.接下来讲一下大概思路吧,源码在最下面
3.非递归算法如下,思路源自于大话数据结构
1.引言
求最小路径这个算法我觉得是难度比较大的了,主要是它的思路比较抽象复杂,不好理解
其实它的思路和prim算法比较接近,要是有学过prim算法的话会更好地理解迪杰斯特拉算法。
先上题目要求
题目描述
给出一个图的邻接矩阵,输入顶点v,用迪杰斯特拉算法求顶点v到其它顶点的最短路径。输入
第一行输入t,表示有t个测试实例第二行输入顶点数n和n个顶点信息
第三行起,每行输入邻接矩阵的一行,以此类推输入n行
第i个结点与其它结点如果相连则为距离,无连接则为0,数据之间用空格
隔开。第四行输入v0,表示求v0到其他顶点的最短路径距离
以此类推输入下一个示例
输出
对每组测试数据,输出:每行输出v0到某个顶点的最短距离和最短路径
每行格式:v0编号-其他顶点编号-最短路径值----[最短路径]。没有路径输出:v0编号-其他顶点编号–1。具体请参考示范数据
样例输入
2
5 0 1 2 3 4
0 5 0 7 15
0 0 5 0 0
0 0 0 0 1
0 0 2 0 0
0 0 0 0 0
0
6 V0 V1 V2 V3 V4 V5
0 0 10 0 30 100
0 0 5 0 0 0
0 0 0 50 0 0
0 0 0 0 0 10
0 0 0 20 0 60
0 0 0 0 0 0
V0
样例输出
0-1-5----[0 1 ]
0-2-9----[0 3 2 ]
0-3-7----[0 3 ]
0-4-10----[0 3 2 4 ]
V0-V1–1
V0-V2-10----[V0 V2 ]
V0-V3-50----[V0 V4 V3 ]
V0-V4-30----[V0 V4 ]
V0-V5-60----[V0 V4 V3 V5 ]
————————————————
版权声明:本文为CSDN博主「晴夏。」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_43757333/article/details/110389973
2.接下来讲一下大概思路吧,源码在最下面
1.setmatrix函数就是用来接收矩阵的,在ShortestPath()函数中,最后面的几行也是输出,
前面的几行是初始化,当然了要先理解前面初始化的那些数值的意义都是什么
初始化各类数据部分
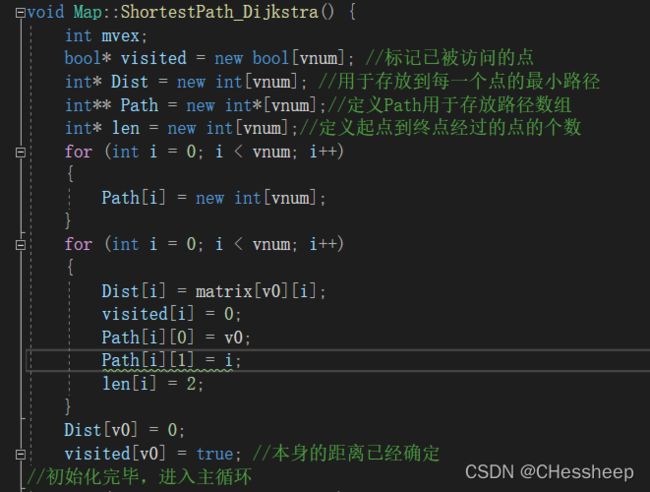
因此主要的算法我们只需要关注中间那二十行代码就可以了
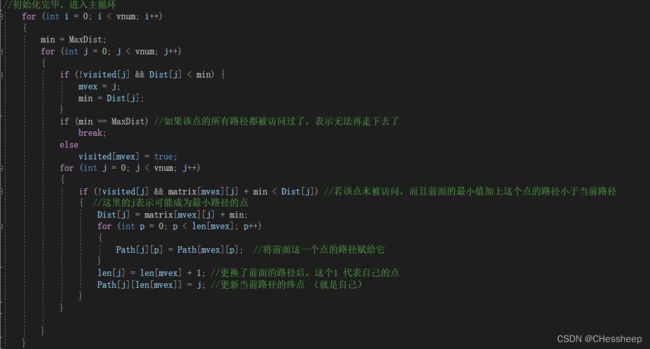
总共有三个for循环嵌套,最外面的大循环是为了保证所有顶点都已经找到了最小路径
第二层循环。。。哎呀我好困啊明天再写吧今天就这样吧,具体的可以看看注释能不能看懂
3.非递归算法如下,思路源自于大话数据结构
#include
using namespace std;
const int MaxDist = 65535;
class Map {
int** matrix;
int v0, min, vnum;//min为最小值
public:
~Map() { delete[] matrix;}
void SetMatrix();
void ShortestPath_Dijkstra();
};
void Map::SetMatrix() {
cin >> vnum;
matrix = new int* [vnum];
for (int i = 0; i < vnum; i++)
{
matrix[i] = new int[vnum];
for (int j = 0; j < vnum; j++)
{
cin >> matrix[i][j]; //初始化数组
}
}
cin >> v0;//输入起始结点
for (int i = 0; i < vnum; i++)
{
for (int j = 0; j < vnum; j++)
{
if (matrix[i][j] == 0 && i != j)
matrix[i][j] = MaxDist;
}
}
}
void Map::ShortestPath_Dijkstra() {
int mvex;
bool* visited = new bool[vnum]; //标记已被访问的点
int* Dist = new int[vnum]; //用于存放到每一个点的最小路径
int** Path = new int*[vnum];//定义Path用于存放路径数组
int* len = new int[vnum];//定义起点到终点经过的点的个数
for (int i = 0; i < vnum; i++)
{
Path[i] = new int[vnum];
}
for (int i = 0; i < vnum; i++)
{
Dist[i] = matrix[v0][i];
visited[i] = 0;
Path[i][0] = v0;
Path[i][1] = i;
len[i] = 2;
}
Dist[v0] = 0;
visited[v0] = true; //本身的距离已经确定
//初始化完毕,进入主循环
for (int i = 0; i < vnum; i++)
{
min = MaxDist;
for (int j = 0; j < vnum; j++)
{
if (!visited[j] && Dist[j] < min) {
mvex = j;
min = Dist[j];
}
if (min == MaxDist) //如果该点的所有路径都被访问过了,表示无法再走下去了
break;
else
visited[mvex] = true;
for (int j = 0; j < vnum; j++)
{
if (!visited[j] && matrix[mvex][j] + min < Dist[j]) //若该点未被访问,而且前面的最小值加上这个点的路径小于当前路径
{ //这里的j表示可能成为最小路径的点
Dist[j] = matrix[mvex][j] + min;
for (int p = 0; p < len[mvex]; p++)
{
Path[j][p] = Path[mvex][p]; //将前面这一个点的路径赋给它
}
len[j] = len[mvex] + 1; //更换了前面的路径后,这个1 代表自己的点
Path[j][len[mvex]] = j; //更新当前路径的终点 (就是自己)
}
}
}
}
//输出
for (int i = 0; i < vnum; i++)
{
if (i != v0 && Dist[i]!=MaxDist) {
cout << v0 << '-' << i << '-' << Dist[i] << "----[";
for (int p = 0; p < len[i]; p++)
{
cout << Path[i][p] << ' ';
}
cout << ']' << endl;
}
}
delete[]visited,Dist;
delete[]Path;
}
int main() {
int t;
cin >> t;
while (t--) {
Map mymap;
mymap.SetMatrix();
mymap.ShortestPath_Dijkstra();
}
} 我自己写过一个递归算法,但是写得实在是太丑陋太冗长了,而且好像总有些小bug,要看的也可以拿去(当时觉得递归实现可以挺简洁的,结果后来一堆问题层出不穷,改了快一周的代码才勉强能用)
#include
#include
using namespace std;
const int MaxDist = 65535;
class Map {
int** matrix;
queue PathQue;//用来存放最短路径经过的点
int Headvex, min, vnum;//sumadj表示每次计算路径的和,min为最小值
void deepFound(int start, int end, int sumadj, queue TemPQ, int* visited);
public:
~Map() { delete[] matrix; }
void SetMatrix(int num);
void ShortestPath_Dijkstra();
};
void Map::SetMatrix(int num) {
matrix = new int* [num]; //开辟空间
vnum = num;
for (int i = 0; i < num; i++)
{
matrix[i] = new int[num];
for (int j = 0; j < num; j++)
{
cin >> matrix[i][j]; //初始化数组
}
}
cin >> Headvex;//输入起始结点
}
void Map::ShortestPath_Dijkstra() {
for (int big = 0; big < vnum; big++) //大循环,求起始点到某个顶点的最小路径
{
min = MaxDist; //初始化路径最小值
int tempmin, Tailvex;
if (big != Headvex)
{
Tailvex = big; //定义终点
//起点和终点已经确定
for (int i = 0; i < vnum; i++) //遍历当前行的所有路径
{
int sumadj = 0;
int* visited = new int[vnum];
for (int j = 0; j < vnum; j++)
{
visited[j] = 0;
}
visited[Headvex] = 1;
queueTemPQ;
while (!TemPQ.empty())
TemPQ.pop(); //每次寻找新的路径时先清空,这个用于暂时存储路径,符合条件就替换
if (matrix[Headvex][i] && matrix[Headvex][i] + sumadj < min && !visited[i]) //满足该路径存在而且该路径加上前面的路径小于min
{
sumadj += matrix[Headvex][i];
if (i == Tailvex) { //找到了终点
visited[i] = 0;//终点可以被多次访问
if (sumadj < min)
{
TemPQ.push(i);
min = sumadj;
PathQue = TemPQ; //找到了终点则将临时存储的路径赋予
}
}
else {
TemPQ.push(i);
visited[i] = 1;
deepFound(i, Tailvex, sumadj, TemPQ, visited); //未到终点则继续深入循环
}
}
}
//输出结果
if (min != MaxDist) {
cout << Headvex << '-' << Tailvex << '-';
cout << min << "----[" << Headvex << ' ';
while (!PathQue.empty()) {
cout << PathQue.front() << ' ';
PathQue.pop();
}
cout << ']' << endl;
}
}
}
}
void Map::deepFound(int start, int end, int sumadj, queue TemPQ, int* visited) {
for (int i = 0; i < vnum; i++) //遍历当前行的所有路径
{
int* TemVisit = visited;
queue TPQ2 = TemPQ;//同理同下
int tempSum = sumadj; //用来临时存放sumadj的变量,为了防止跳出递归后sumadj的值不会恢复
if (matrix[start][i] && matrix[start][i] + tempSum < min && !TemVisit[i]) //满足该路径存在而且该路径加上前面的路径小于min
{
tempSum += matrix[start][i];
if (i == end) { //找到了终点
TemVisit[i] = 0;//终点可以被多次访问
if (tempSum < min)
{
TPQ2.push(i);
min = tempSum;
PathQue = TPQ2; //找到了终点则将临时存储的路径赋予
}
}
else {
TemVisit[i] = 1;
TPQ2.push(i);
deepFound(i, end, tempSum, TPQ2, TemVisit);
}
}
}
}
int main() {
int t;
cin >> t;
while (t--) {
int vnum;
cin >> vnum;
Map mymap;
mymap.SetMatrix(vnum);
mymap.ShortestPath_Dijkstra();
}
}