PyTorch 深度学习 || 4. 自编码网络 | Ch4.3 卷积自编码网络图像去噪
卷积自编码网络图像去噪
1. 数据的准备
先简单介绍一下训练网络使用到的图像数据集——STL10,该数据集可以通过torchvision.datasets模块中的STL10()函数进行下载,该数据集共包含三种类型数据,分别是带有标签的训练集和验证集,分别包含5000张和8000张图像,共有10类数据,还有一个类型包含10万张的无标签图像,均是96×96的RGB图像,可用于无监督学习。虽然使用STL10()函数可直接下载该数据集,但数据大小仅约2.5GB,且下载的数据是二进制数据,故建议直接到数据网址下载,并保存到指定的文件夹。 为了节省时间和增加模型的训练速度,在搭建的卷积自编码网络中只使用包含5000张图像的训练集,其中使用4000张图像用来训练模型,剩余1000张图像作为模型的验证集。 在定义网络之前,首先准备数据,并对数据进行预处理。定义一个从.bin文件中读取数据的函数,并且将读取的数据进行预处理,便于后续的使用.
10 classes: airplane, bird, car, cat, deer, dog, horse, monkey, ship, truck.
Images are 96x96 pixels, color.
5000 training images (10 pre-defined folds), 8000 test images per class.
100000 unlabeled images for unsupervised learning.
因为使用STL10()函数来读取数据时需要下载2.5G的数据(约110000多张图像)。
为了节省时间和增加模型训练速度,我们只使用5000张图像来作为模型总的训练集和验证集。
将5000张图像重新进行数据切分,其中4000张用于训练,1000张作为验证集
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.model_selection import train_test_split
from skimage.util import random_noise
from skimage.metrics import peak_signal_noise_ratio as compare_psnr
import torch
from torch import nn
import torch.nn.functional as F
import torch.utils.data as Data
import torch.optim as optim
from torchvision import transforms
from torchvision.datasets import STL10
def read_image(file_path):
with open(file_path,"rb") as f:
data=np.fromfile(f,dtype=np.uint8)
#图像[数量、通道、宽、高]
images=np.reshape(data,(-1,3,96,96))
#图像转化为RGB格式
images=np.transpose(images,(0,3,2,1))
#输出的图像范围取值在0-1之间
return images/255.0
## 读取训练数据集,5000张96*96*3的图像
data_path = "data/STL10/stl10_binary/train_X.bin"
images = read_image(data_path)
print("images.shape:",images.shape)
images.shape: (5000, 96, 96, 3)
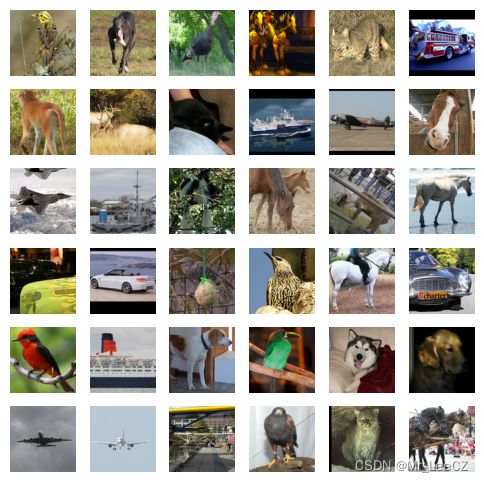
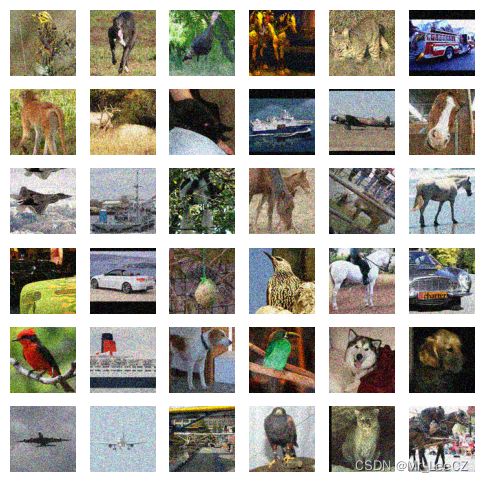
下面定义一个为图像数据添加高斯噪声的函数,为每一张图像添加随机噪声,并可视化原始图像与添加噪声之后的图像
def gaussian_noise(images,sigma):
sigma2=sigma**2/(255**2)#噪声方差
images_noisy=np.zeros_like(images)
for i in range(images.shape[0]):
image=images[i]
#使用skimage中的random_noise添加噪声
noise_im=random_noise(image,mode="gaussian",var=sigma2,clip=True)
images_noisy[i]=noise_im
return images_noisy
images_noise=gaussian_noise(images,30)
print("images_noise:",images_noise.min(),"~",images_noise.max())
#不带噪声的图像
plt.figure(figsize=(6,6))
for i in np.arange(36):
plt.subplot(6,6,i+1)
plt.imshow(images[i,...])
plt.axis("off")
plt.show()
#带噪声的数据
plt.figure(figsize=(6,6))
for i in np.arange(36):
plt.subplot(6,6,i+1)
plt.imshow(images_noise[i,...])
plt.axis("off")
plt.show()
images_noise: 0.0 ~ 1.0
2. 数据的预处理
## 数据准备为Pytorch可用的形式
## 转化为[样本,通道,高,宽]的数据形式
data_Y = np.transpose(images, (0, 3, 2, 1))
data_X = np.transpose(images_noise, (0, 3, 2, 1))
## 将数据集切分为训练集和验证集
X_train, X_val, y_train, y_val = train_test_split(
data_X,data_Y,test_size = 0.2,random_state = 123)
## 将图像数据转化为向量数据
X_train = torch.tensor(X_train, dtype=torch.float32)
y_train = torch.tensor(y_train, dtype=torch.float32)
X_val = torch.tensor(X_val, dtype=torch.float32)
y_val = torch.tensor(y_val, dtype=torch.float32)
## 将X和Y转化为数据集合
train_data = Data.TensorDataset(X_train,y_train)
val_data = Data.TensorDataset(X_val,y_val)
print("X_train.shape:",X_train.shape)
print("y_train.shape:",y_train.shape)
print("X_val.shape:",X_val.shape)
print("y_val.shape:",y_val.shape)
X_train.shape: torch.Size([4000, 3, 96, 96])
y_train.shape: torch.Size([4000, 3, 96, 96])
X_val.shape: torch.Size([1000, 3, 96, 96])
y_val.shape: torch.Size([1000, 3, 96, 96])
3. 定义一个数据加载器
## 定义一个数据加载器
train_loader = Data.DataLoader(
dataset = train_data, ## 使用的数据集
batch_size=32, # 批处理样本大小
shuffle = True, # 每次迭代前打乱数据
num_workers = 4, # 使用4个进程
)
## 定义一个数据加载器
val_loader = Data.DataLoader(
dataset = val_data, ## 使用的数据集
batch_size=32, # 批处理样本大小
shuffle = True, # 每次迭代前打乱数据
num_workers = 4, # 使用4个进程
)
for step, (b_x, b_y) in enumerate(train_loader):
if step > 0:
break
## 输出训练图像的尺寸和标签的尺寸
print(b_x.shape)
print(b_y.shape)
torch.Size([32, 3, 96, 96])
torch.Size([32, 3, 96, 96])
4. 卷积自编码去噪(转置解码)
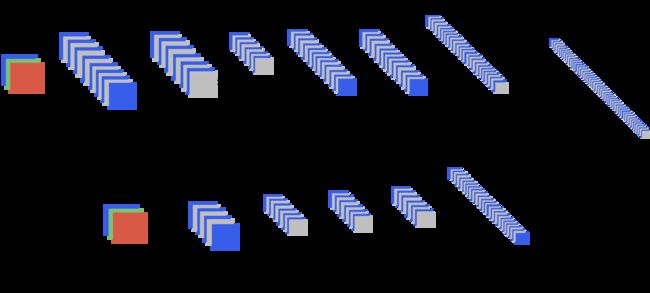
class DenoiseAutoEncoder(nn.Module):
def __init__(self):
super(DenoiseAutoEncoder,self).__init__()
## 定义Encoder
self.Encoder = nn.Sequential(
nn.Conv2d(in_channels=3,out_channels=64,
kernel_size = 3,stride=1,padding=1), # [,64,96,96]
nn.ReLU(),
nn.BatchNorm2d(64),
nn.Conv2d(64,64,3,1,1),# [,64,96,96]
nn.ReLU(),
nn.BatchNorm2d(64),
nn.Conv2d(64,64,3,1,1),# [,64,96,96]
nn.ReLU(),
nn.MaxPool2d(2,2),# [,64,48,48]
nn.BatchNorm2d(64),
nn.Conv2d(64,128,3,1,1),# [,128,48,48]
nn.ReLU(),
nn.BatchNorm2d(128),
nn.Conv2d(128,128,3,1,1),# [,128,48,48]
nn.ReLU(),
nn.BatchNorm2d(128),
nn.Conv2d(128,256,3,1,1),# [,256,48,48]
nn.ReLU(),
nn.MaxPool2d(2,2),# [,256,24,24]
nn.BatchNorm2d(256),
)
## 定义Decoder
self.Decoder = nn.Sequential(
nn.ConvTranspose2d(256,128,3,1,1), # [,128,24,24]
nn.ReLU(),
nn.BatchNorm2d(128),
nn.ConvTranspose2d(128,128,3,2,1,1), # [,128,48,48]
nn.ReLU(),
nn.BatchNorm2d(128),
nn.ConvTranspose2d(128,64,3,1,1), # [,64,48,48]
nn.ReLU(),
nn.BatchNorm2d(64),
nn.ConvTranspose2d(64,32,3,1,1), # [,32,48,48]
nn.ReLU(),
nn.BatchNorm2d(32),
nn.ConvTranspose2d(32,32,3,1,1), # [,32,48,48]
nn.ConvTranspose2d(32,16,3,2,1,1), # [,16,96,96]
nn.ReLU(),
nn.BatchNorm2d(16),
nn.ConvTranspose2d(16,3,3,1,1), # [,3,96,96]
nn.Sigmoid(),
)
## 定义网络的向前传播路径
def forward(self, x):
encoder = self.Encoder(x)
decoder = self.Decoder(encoder)
return encoder,decoder
## 输出我们的网络结构
DAEmodel = DenoiseAutoEncoder()
print(DAEmodel)
DenoiseAutoEncoder(
(Encoder): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): ReLU()
(5): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(9): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(10): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU()
(12): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(13): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(14): ReLU()
(15): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(16): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(17): ReLU()
(18): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(19): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(Decoder): Sequential(
(0): ConvTranspose2d(256, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): ConvTranspose2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), output_padding=(1, 1))
(4): ReLU()
(5): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): ConvTranspose2d(128, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(9): ConvTranspose2d(64, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(10): ReLU()
(11): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(12): ConvTranspose2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ConvTranspose2d(32, 16, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), output_padding=(1, 1))
(14): ReLU()
(15): BatchNorm2d(16, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(16): ConvTranspose2d(16, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(17): Sigmoid()
)
)
H o u t = ( H i n − 1 ) × stride [ 0 ] − 2 × padding [ 0 ] + kernel_size [ 0 ] + output_padding [ 0 ] H_{out} = (H_{in} - 1) \times \text{stride}[0] - 2 \times \text{padding}[0] + \text{kernel\_size}[0] + \text{output\_padding}[0] Hout=(Hin−1)×stride[0]−2×padding[0]+kernel_size[0]+output_padding[0]
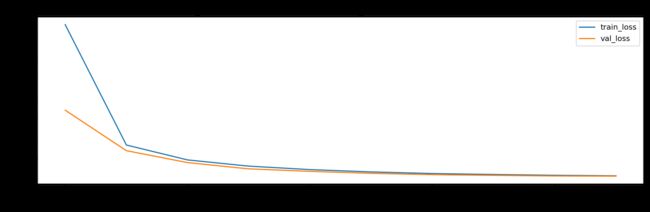
6. 训练网络
# 定义优化器
LR = 0.0003
optimizer = torch.optim.Adam(DAEmodel.parameters(), lr=LR)
loss_func = nn.MSELoss() # 损失函数
# 记录训练过程的指标
history1 = hl.History()
# 使用Canvas进行可视化
canvas1 = hl.Canvas()
train_num = 0
val_num = 0
## 对模型进行迭代训练,对所有的数据训练EPOCH轮
for epoch in range(10):
train_loss_epoch = 0
val_loss_epoch = 0
## 对训练数据的迭代器进行迭代计算
for step, (b_x,b_y) in enumerate(train_loader):
DAEmodel.train()
## 使用每个batch进行训练模型
_,output = DAEmodel(b_x) # CNN在训练batch上的输出
loss = loss_func(output, b_y) # 平方根误差
optimizer.zero_grad() # 每个迭代步的梯度初始化为0
loss.backward() # 损失的后向传播,计算梯度
optimizer.step() # 使用梯度进行优化
train_loss_epoch += loss.item() * b_x.size(0)
train_num = train_num+b_x.size(0)
## 使用每个batch进行验证模型
for step, (b_x,b_y) in enumerate(val_loader):
DAEmodel.eval()
_,output = DAEmodel(b_x) # CNN在训练batch上的输出
loss = loss_func(output, b_y) # 平方根误差
val_loss_epoch += loss.item() * b_x.size(0)
val_num = val_num+b_x.size(0)
## 计算一个epoch的损失
train_loss = train_loss_epoch / train_num
val_loss = val_loss_epoch / val_num
## 保存每个epoch上的输出loss
history1.log(epoch,train_loss=train_loss,
val_loss = val_loss)
# 可视网络训练的过程
with canvas1:
canvas1.draw_plot([history1["train_loss"],history1["val_loss"]])
8. 模型的保存与载入
## 保存模型
# torch.save(DAEmodel,"data/chap8/DAEmodel_1.pkl")
# ## 导入保存的模型
# DAEmodel = torch.load("data/chap8/DAEmodel_1.pkl")
# DAEmodel
9. 验证
## 输入
imageindex = 6
im = X_val[imageindex,...]
im = im.unsqueeze(0)
imnose = np.transpose(im.data.numpy(),(0,3,2,1))
imnose = imnose[0,...]
## 去噪
#DAEmodel.eval()
#_,output = DAEmodel(im)
_,output = model(im)
imde = np.transpose(output.data.numpy(),(0,3,2,1))
imde = imde[0,...]
## 输出
im = y_val[imageindex,...]
imor = im.unsqueeze(0)
imor = np.transpose(imor.data.numpy(),(0,3,2,1))
imor = imor[0,...]
## 计算去噪后的PSNR
print("加噪后的PSNR:",compare_psnr(imor,imnose),"dB")
print("去噪后的PSNR:",compare_psnr(imor,imde),"dB")
## 将图像可视化
plt.figure(figsize=(12,4))
plt.subplot(1,3,1)
plt.imshow(imor)
plt.axis("off")
plt.title("Origin image")
plt.subplot(1,3,2)
plt.imshow(imnose)
plt.axis("off")
plt.title("Noise image $\sigma$=30")
plt.subplot(1,3,3)
plt.imshow(imde)
plt.axis("off")
plt.title("Deoise image")
plt.show()
加噪后的PSNR: 18.62932059399426 dB
去噪后的PSNR: 30.120838394590464 dB
