Linux进程信号【信号处理】
✨个人主页: 北 海
所属专栏: Linux学习之旅
操作环境: CentOS 7.6 阿里云远程服务器

文章目录
- 前言
- ️正文
-
- 1、信号的处理时机
-
- 1.1、处理情况
- 1.2、"合适" 的时机
- 2、用户态与内核态
-
- 2.1、概念
- 2.2、重谈进程地址空间
- 2.3、信号的处理过程
- 3、信号的捕捉
-
- 3.1、内核如何实现信号的捕捉?
- 3.2、sigaction
- 4、信号部分小结
- 总结
前言
从信号产生到信号保存,中间经历了很多,当操作系统准备对信号进行处理时,还需要判断时机是否 “合适”,在绝大多数情况下,只有在 “合适” 的时机才能处理信号,即调用信号的执行动作。关于信号何时处理、该如何处理,本文中将会一一揭晓
捕捉动作并进行处理

️正文
1、信号的处理时机
直奔主题,谈谈信号的 处理时机
1.1、处理情况
普通情况
所谓的普通情况就是指 信号没有被阻塞,直接产生,记录未决信息后,再进行处理
在这种情况下,信号是不会被立即递达的,也就无法立即处理,需要等待合适的时机
特殊情况
当信号被 阻塞 后,信号 产生 时,记录未决信息,此时信号被阻塞了,也不会进行处理
当阻塞解除后,信号会被立即递达,此时信号会被立即处理
特殊情况 很好理解,就好比往气球里吹气,当气球炸了,空气会被立即释放,因为空气是被气球 阻塞 的,当气球炸了之后(阻塞 解除),空气立马往外跑,这不就是 立即递达、立即处理 吗?

普通情况 就有点难搞了,它需要等待 “合适” 的时机,才能被 递达,继而被 处理
1.2、“合适” 的时机
信号的产生是 异步 的
也就是说,信号可能随时产生,当信号产生时,进程可能在处理更重要的事,此时贸然处理信号显然不够明智
比如进程正在执行一个重要的
IO,突然一个终止信号发出,IO立即终止,对进程、磁盘都不好
因此信号在 产生 后,需要等进程将 更重要 的事忙完后(合适的时机),才进行 处理
合适的时机:进程从 内核态 返回 用户态 时,会在操作系统的指导下,对信号进行检测及处理
至于处理动作,分为:默认动作、忽略、用户自定义
搞清楚 “合适” 的时机 后,接下来需要学习 用户态 和 内核态 相关知识
2、用户态与内核态
对于 用户态、内核态 的理解及引出的 进程地址空间 和 信号处理过程 相关知识是本文的重难点
2.1、概念
先来看看什么是 用户态和内核态
用户态:执行用户所写的代码时,就属于 用户态
内核态:执行操作系统的代码时,就属于 内核态
自己写的代码被执行很好理解,操作系统的代码是什么?
- 操作系统也是由大量代码构成的
- 在对进程进行调度、执行系统调用、异常、中断、陷阱等,都需要借助操作系统之手
- 此时执行的就是操作系统的代码
也就是说,用户态 与 内核态 是两种不同的状态,必然存在相互转换的情况
用户态 切换为 内核态:
- 当进程时间片到了之后,进行进程切换动作
- 调用系统调用接口,比如
open、close、read、write等 - 产生异常、中断、陷阱等
内核态 切换为 用户态:
- 进程切换完毕后,运行相应的进程
- 系统调用结束后
- 异常、中断、陷阱等处理完毕
信号的处理时机就是 内核态 切换为 用户态,也就是 当把更重要的事做完后,进程才会在操作系统的指导下,对信号进行检测、处理
下面来结合 进程地址空间 深入理解 操作系统的代码 及 状态切换 的相关内容(拓展知识)
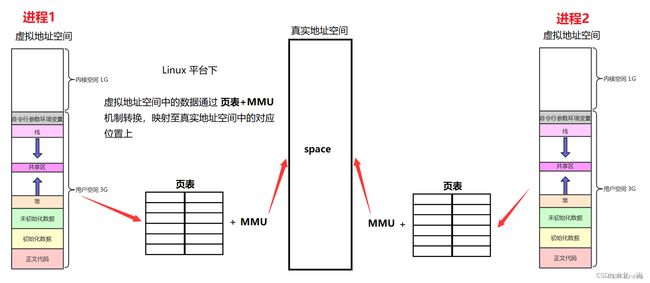
2.2、重谈进程地址空间
首先简单回顾下 进程地址空间 的相关知识:
- 进程地址空间 是虚拟的,依靠 页表+
MMU机制 与真实的地址空间建立映射关系 - 每个进程都有自己的 进程地址空间,不同 进程地址空间 中地址可能冲突,但实际上地址是独立的
- 进程地址空间 可以让进程以统一的视角看待自己的代码和数据
关于 进程地址空间 的相关知识详见 《Linux进程学习【进程地址】》
不难发现,在 进程地址空间 中,存在 1 GB 的 内核空间,每个进程都有,而这 1 GB 的空间中存储的就是 操作系统 相关 代码 和 数据,并且这块区域采用 内核级页表 与 真实地址空间 进行映射
为什么要区分 用户态 与 内核态 ?
- 内核空间中存储的可是操作系统的代码和数据,权限非常高,绝不允许随便一个进程对其造成影响
- 区域的合理划分也是为了更好的进行管理

所谓的 执行操作系统的代码及系统调用,就是在使用这 1 GB 的内核空间
进程间具有独立性,比如存在用户空间中的代码和数据是不同的,难道多个进程需要存储多份 操作系统的代码和数据 吗?
- 当然不用,内核空间比较特殊,所有进程最终映射的都是同一块区域,也就是说,进程只是将 操作系统代码和数据 映射入自己的 进程地址空间 而已
- 而 内核级页表 不同于 用户级页表,专注于对 操作系统代码和数据 进行映射,是很特殊的
当我们执行诸如 open 这类的 系统调用 时,会跑到 内核空间 中调用对应的函数
而 跑到内核空间 就是 用户态 切换为 内核态 了(用户空间切换至内核空间)
这个 跑到 是如何实现的呢?
在 CPU 中,存在一个 CR3 寄存器,这个 寄存器 的作用就是用来表征当前处于 用户态 还是 内核态
- 当寄存器中的值为
3时:表示正在执行用户的代码,也就是处于 用户态 - 当寄存器中的值为
0时:表示正在执行操作系统的代码,也就是处于 内核态
通过一个 寄存器,表征当前所处的 状态,修改其中的 值,就可以表示不同的 状态,这是很聪明的做法

重谈 进程地址空间 后,得到以下结论
- 所有进程的用户空间
[0, 3] GB是不一样的,并且每个进程都要有自己的 用户级页表 进行不同的映射 - 所有进程的内核空间
[3, 4] GB是一样的,每个进程都可以看到同一张内核级页表,从而进行统一的映射,看到同一个 操作系统 - 操作系统运行 的本质其实就是在该进程的 内核空间内运行的(最终映射的都是同一块区域)
- 系统调用 的本质其实就是在调用库中对应的方法后,通过内核空间中的地址进行跳转调用
那么进程又是如何被调度的呢?
- 操作系统的本质
- 操作系统也是软件啊,并且是一个死循环式等待指令的软件
- 存在一个硬件:操作系统时钟硬件,每隔一段时间向操作系统发送时钟中断- 进程被调度,就意味着它的时间片到了,操作系统会通过时钟中断,检测到是哪一个进程的时间片到了,然后通过系统调用函数
schedule()保存进程的上下文数据,然后选择合适的进程去运行
2.3、信号的处理过程
当在 内核态 完成某种任务后,需要切回 用户态,此时就可以对信号进行 检测 并 处理 了
情况1:信号被阻塞,信号产生/未产生
信号都被阻塞了,也就不需要处理信号,此时不用管,直接切回 用户态 就行了
下面的情况都是基于 信号未被阻塞 且 信号已产生 的前提
情况2:当前信号的执行动作为 默认
大多数信号的默认执行动作都是 终止 进程,此时只需要把对应的进程干掉,然后切回 用户态 就行了

情况3:当前信号的执行动作为 忽略
当信号执行动作为 忽略 时,不做出任何动作,直接返回 用户态

情况4:当前信号的执行动作为 用户自定义
这种情况就比较麻烦了,用户自定义的动作位于 用户态 中,也就是说,需要先切回 用户态,把动作完成了,重新坠入 内核态,最后才能带着进程的上下文相关数据,返回 用户态
在 内核态 中,也可以直接执行 自定义动作,为什么还要切回 用户态 执行自定义动作?
- 因为在 内核态 可以访问操作系统的代码和数据,自定义动作 可能干出危害操作系统的事
- 在 用户态 中可以减少影响,并且可以做到溯源
为什么不在执行完 自定义动作 直接后返回进程?
- 因为 自定义动作 和 待返回的进程 属于不同的堆栈,是无法返回的
- 并且进程的上下文数据还在内核态中,所以需要先坠入内核态,才能正确返回用户态

注意: 用户自定义的动作,需要先切换至 用户态 中执行,执行结束后,还需要坠入 内核态
通过一张图快速记录信号的 处理 过程

图片来源:Linux进程信号
3、信号的捕捉
接下来谈谈 信号 是如何被 捕捉 的
3.1、内核如何实现信号的捕捉?
如果信号的执行动作为 用户自定义动作,当信号 递达 时调用 用户自定义动作,这一动作称为 信号捕捉
用户自定义动作 是位于 用户空间 中的
当 内核态 中任务完成,准备返回 用户态 时,检测到信号 递达,并且此时为 用户自定义动作,需要先切入 用户态 ,完成 用户自定义动作 的执行;因为 用户自定义动作 和 待返回的函数 属于不同的 堆栈 空间,它们之间也不存在 调用与被调用 的关系,是两个 独立的执行流,需要先坠入 内核态 (通过 sigreturn() 坠入),再返回 用户态 (通过 sys_sigreturn() 返回)
上述过程可以总结为下图:

3.2、sigaction
sigaction 也可以 用户自定义动作,比 signal 功能更丰富

#include 返回值:成功返回 0,失败返回 -1 并将错误码设置
参数1:待操作的信号
参数2:sigaction 结构体,具体成员如上所示
参数3:保存修改前进程的 sigaction 结构体信息
这个函数的主要看点是 sigaction 结构体
struct sigaction
{
void (*sa_handler)(int); //自定义动作
void (*sa_sigaction)(int, siginfo_t *, void *); //实时信号相关,不用管
sigset_t sa_mask; //待屏蔽的信号集
int sa_flags; //一些选项,一般设为 0
void (*sa_restorer)(void); //实时信号相关,不用管
};
其中部分字段不需要管,因为那些是与 实时信号 相关的,我们这里不讨论
重点可以看看 sa_mask 字段
sa_mask:当信号在执行 用户自定义动作 时,可以将部分信号进行屏蔽,直到 用户自定义动作 执行完成
也就是说,我们可以提前设置一批 待阻塞 的 屏蔽信号集,当执行 signum 中的 用户自定义动作 时,这些 屏蔽信号集 中的 信号 将会被 屏蔽(避免干扰 用户自定义动作 的执行),直到 用户自定义动作 执行完成
可以简单用一下 sigaction 函数
#include 
当 2 号信号的循环结束(10 秒),3、4、5 信号的 阻塞 状态解除,立即被 递达,进程就被干掉了
注意: 屏蔽信号集 sa_mask 中已屏蔽的信号,在 用户自定义动作 执行完成后,会自动解除 阻塞 状态
4、信号部分小结
截至目前,信号 处理的所有过程已经全部学习完毕了
信号产生阶段:有四种产生方式,包括 键盘键入、系统调用、软件条件、硬件异常
信号保存阶段:内核中存在三张表,blcok 表、pending 表以及 handler 表,信号在产生之后,存储在 pending 表中
信号处理阶段:信号在 内核态 切换回 用户态 时,才会被处理

总结
以上就是本次关于 Linux进程信号【信号处理】的全部内容了,本文对信号的处理时机做了探讨,然后学习了 用户态 和 内核态 的相关内容,最后学习了 信号的捕捉 过程,至此 进程信号 部分内容已经全部完结

相关文章推荐 Linux进程信号 ===== :>
【信号产生】、【信号保存】Linux进程间通信 ===== :>
【消息队列、信号量】、【共享内存】、【命名管道】、【匿名管道】
Linux基础IO ===== :>
【软硬链接与动静态库】、【深入理解文件系统】、【模拟实现C语言文件流】、【重定向及缓冲区理解】、【文件理解与操作】
Linux进程控制 ===== :>
【简易版bash】、【进程程序替换】、【创建、终止、等待】
Linux进程学习 ===== :>
【进程地址】、【环境变量】、【进程状态】、【基本认知】
Linux基础 ===== :>
【gdb】、【git】、【gcc/g++】、【vim】、Linux 权限理解和学习、听说Linux基础指令很多?这里都帮你总结好了