机器视觉中三大坐标系及其相互关系;世界、相机、图像、像素坐标系之间的关系
一、机器视觉中三大坐标系及其相互关系
机器视觉系统有三大坐标系,分别是:1、世界坐标系,2、摄像机坐标系,3、图像(像素)坐标系。
1、世界坐标系
世界坐标系(Xw,Yw,Zw)是目标物体位置的参考系,根据运算方便自由设置圆点位置,可以位于机器手底座或者机器手前端执行器上。
其主要作用有
(1)盛放物体的三维坐标;
(2)标定的时候根据原点确定标定物的位置;
(3)给定出两个摄像机相对于世界坐标系的位置,从而求出两个或多个相机之间的坐标关系;
2、摄像机坐标系
摄像机坐标系(Xc,Yc,Zc)是摄像机在自己角度上的坐标系,原点在摄像机的光心上,Z轴与摄像机光轴平行,即摄像机的镜头拍摄方向。
3、图像(像素)坐标系
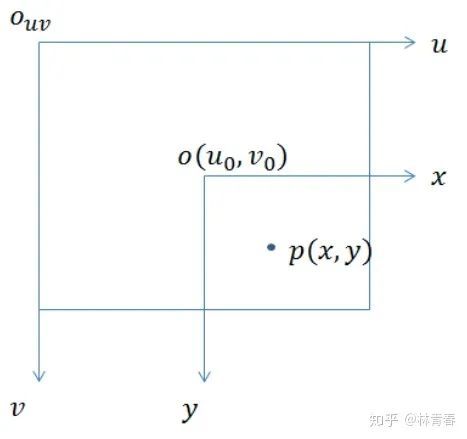
3.1、图像坐标系
图像坐标系(x,y)单位米或毫米,是连续图像坐标或者空间坐标,以图片对角线交点作为基准原点建立的坐标系。
3.2、像素坐标系
像素坐标系(u,v)单位尺度为一个pixel,是离散图像坐标或像素坐标,原点在图片的左上角。
4、坐标系之间的关系
当我们在图片中确定了某个物体的位置,如何让机器手去到空间中的实际位置进行抓取呢?这就需要对坐标进行转换。而从像素点到空间点的转换与空间点到像素点的转换是相反的,我们先将后者的推导过程。
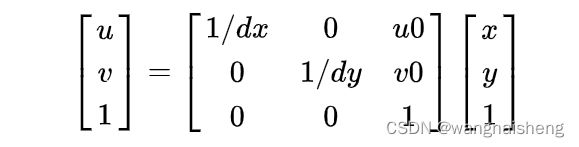
4.1、图像坐标系与像素坐标系
图像坐标系与像素坐标系的关系为:
dx代表一个像素的宽度(x方向),与x同单位,x/dx表示x轴上有多少个像素,同理y/dy表示y轴上的像素个数,(u0,v0)是图像平面中心。
将上述关系转换为矩阵形式:
4.2、相机坐标系与图像坐标系
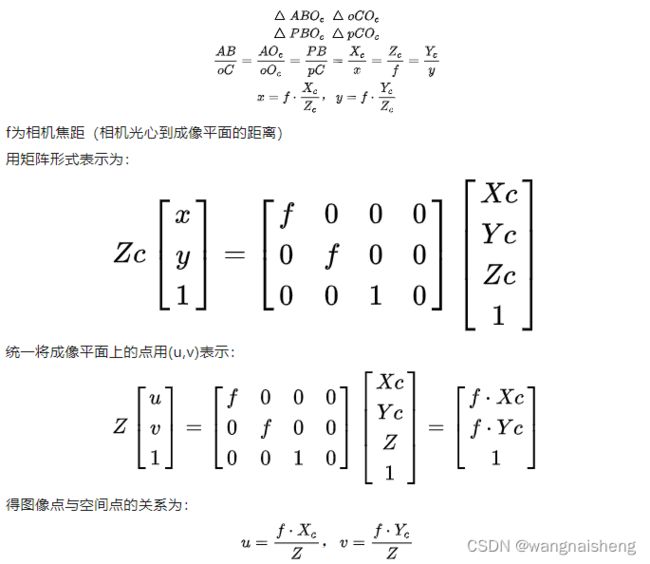
从相机坐标系到图像坐标系是一个三维坐标到二维坐标(3D->2D)的过程,称之为透视投影变换。为了求解它们之间的关系,将普通图像坐标(x,y)拓展为齐次坐标(x,y,1)。空间中的某点,投影到图像平面上的点与相机的光心在一条直线上。以光心为原点建立相机坐标系:
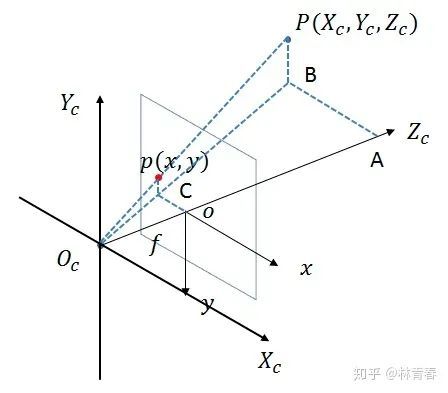
根据相似三角形关系可以得到以下:
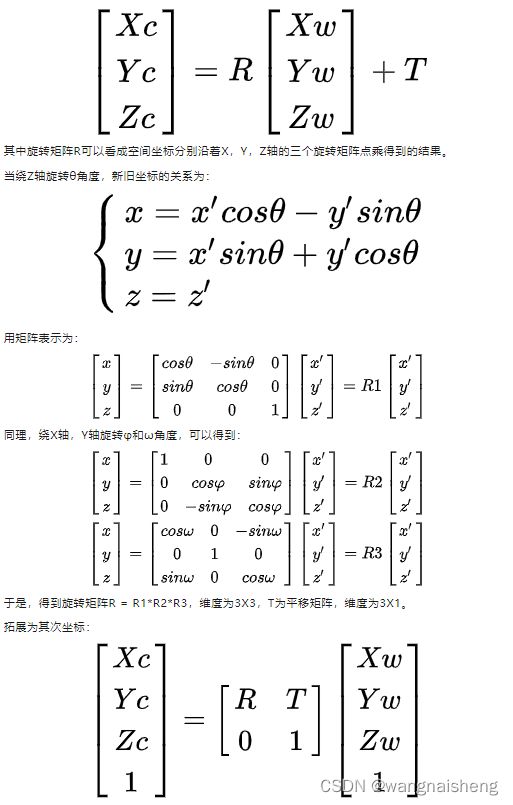
4.3、世界坐标系与相机坐标系
世界坐标(Xw,Yw,Zw)与相机坐标(Xc,Yc,Zc)同为三维坐标(右手系,三轴互相垂直),两个坐标系的关系为刚体变换(刚体变换:当物体不发生形变时,对一个几何物体作旋转,平移的运动)。可以先凭空想象下,有两个坐标系A与B,如何将A坐标系下的坐标转换到B坐标系表示,首先将A坐标系以原点为基准任意旋转,使其x轴,y轴,z轴与B坐标轴平行且同方向,接着平移AB坐标系原点的直线距离,就可以将A坐标系下的坐标转换到B坐标系,这个旋转Rotation与平移Transport就是需要求得的两个三维坐标之间的关系。
用以下等式表示两个坐标系之间的关系:
4.4、从世界坐标到像素坐标
综合上面推导的过程,世界坐标(Xw,Yw,Zw)—>相机坐标(Xc,Yc,Zc)—>图像坐标(x,y)—>像素坐标(u,v),以上顺序用矩阵表示为不断左乘下一步,即:

等式右边的前两个矩阵称的乘积为相机内参,第三个矩阵称为相机外参,后面的单目相机标定,就是为了求解相机的内外参数。
转至:总结|机器视觉中三大坐标系及其相互关系
二、世界、相机、图像、像素坐标系之间的关系
世界坐标系:就是客观三维世界的绝对坐标系,也成为客观坐标系。在环境中还选择一个参考坐标系来描述摄像机和物体的位置,该坐标系称为世界坐标系。设该坐标系下存在一个物体P的坐标为(X, Y, C)
相机坐标系:以相机光点为中心,X,Y轴平行于图像的两条边,光轴为Z轴所建立的坐标系。用(Xc, Yc, Zc)表示物体P在相机坐标系下的位置。
世界坐标系和相机坐标系的关系:刚体变换---世界坐标系中的某一点可以通过旋转R和平移t转换成相机坐标系中的一点。(二者都是三维的,只是坐标系不同)
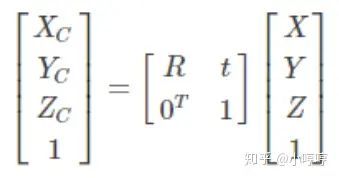
R是3x3的矩阵,t是3x1的向量
图像坐标系:以图像中心为坐标原点,X,Y轴平行于图像两边,可以用(x, y)表示物体P的坐标值。(单位是mm,代表该像素在图像中的位置)
相机坐标系和图像坐标系之间的关系:透视投影---与小孔成像原理类似。
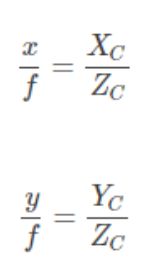
与焦距相关
转换成齐次坐标系和矩阵来表示:

像素坐标系:以图像左上角为原点,X,Y轴分别平行于图像两边的坐标系。用(u, v)表示其坐标值。
图像坐标系和像素坐标系的关系:仿射变化---图像坐标系中的(x, y)单位是mm,其中dx代表每一个像素的物理距离是多少,即单位是mm/pix。所以x*(1/dx)的单位就是像素pix。
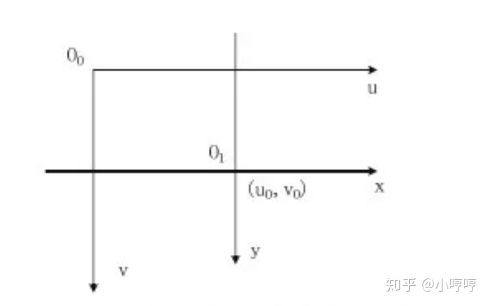
图像坐标系和像素坐标系的关系,(u0, v0)代表该中心点在像素坐标系下的坐标。
图像坐标系上的某一点坐标为(x, y),相对于其原点(u0, v0)的像素坐标为(x/dx, y/dy),相对于像素坐标原点的坐标如上式子,即(u,v) = (x/dx+u0, y/dy+v0)
总结:世界坐标系中的某一点(X, Y, Z)可以通过刚体变换、透视投影、仿射变化得到它在图像中的位置。
就上面这个式子可以看出来:如果我们需要对一个成像系统建模,那就需要知道内参和外参。在实际的生活中,获取内参和外参的方法就是标定。
转至:世界、相机、图像、像素坐标系之间的关系 - 知乎