【状态估计】基于卡尔曼滤波器和扩展卡尔曼滤波器用于 INS/GNSS 导航、目标跟踪和地形参考导航研究(Matlab代码实现)
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
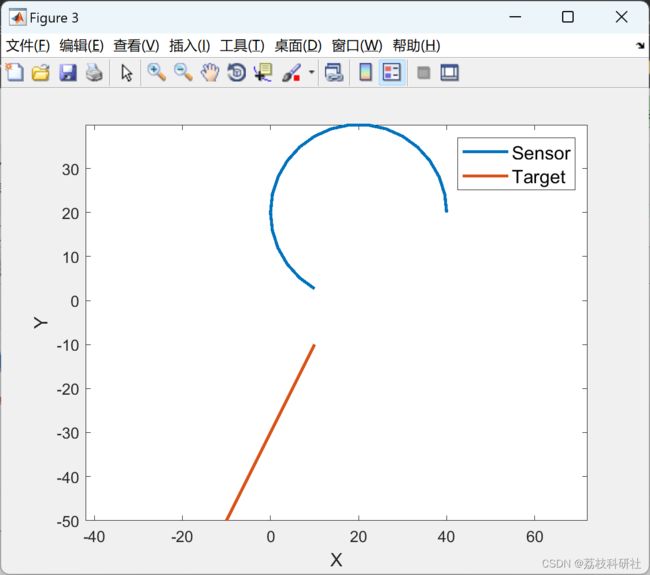
2 运行结果
2.1 算例1
2.2 算例2
2.3 算例3
3 参考文献
4 Matlab代码及数据

1 概述
EKF 是卡尔曼滤波器在非线性系统中的应用的推广延伸,其离散非线性系统的状态和测量方程表示为:

EKF 原理如图 1 所示。
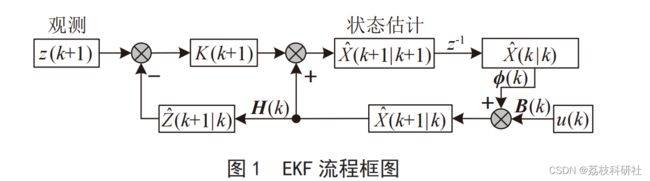
EKF 主要包含时间更新(预测)与测量更新(校正)两个阶段。 时间更新包含以下部分:

卡尔曼滤波器法原理由射影定理推导而来,能在线性高斯模型的情况下对目标状态做出最优估计,但实际系统多为非线性系统[83]。为解决非线性系统滤波问题,常用处理方法是将其看作一个近似的线性滤波问题。目前应用较多的是 EKF,其核心思想是在滤波值处将非线性函数和进行一阶泰勒级数展开,并忽略其高阶项,得到局部线性化模型,然后再应用 KF 进行滤波估计。
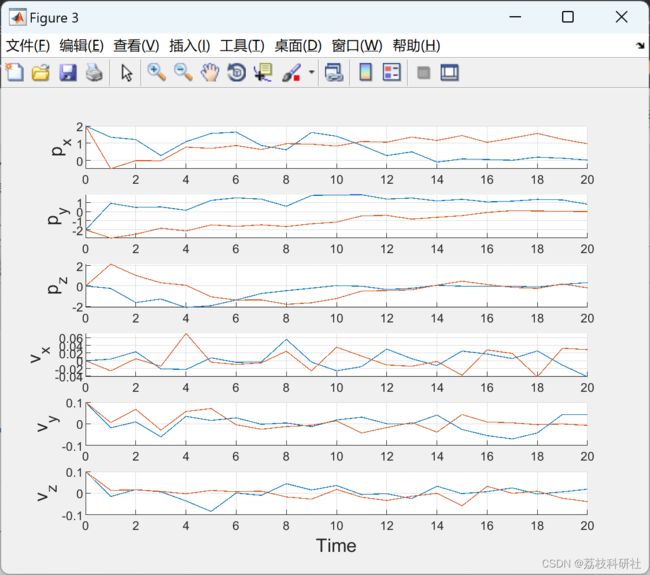
2 运行结果
2.1 算例1


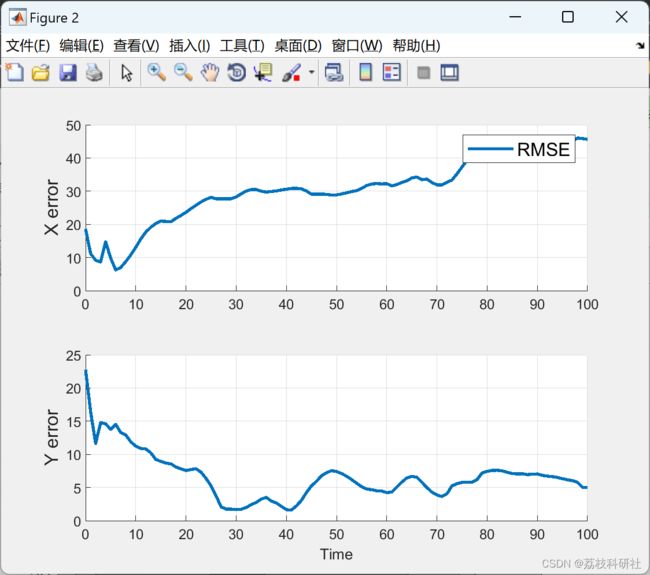
2.2 算例2

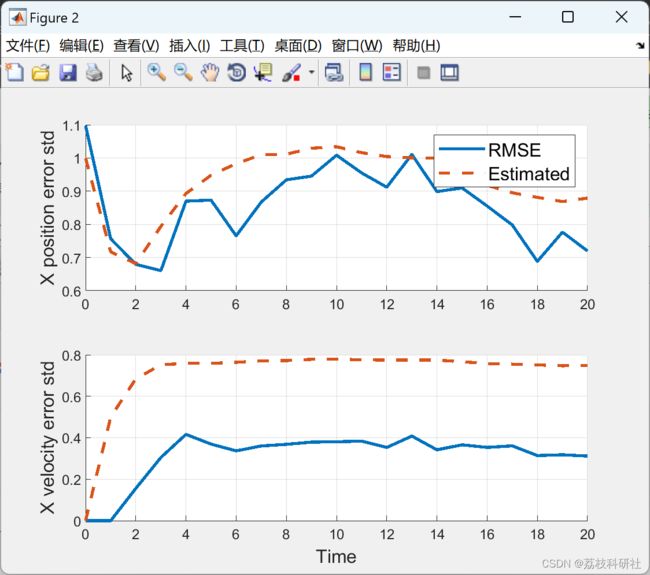
2.3 算例3

部分代码:
N = 20; % number of time steps
dt = 1; % time between time steps
M = 100; % number of Monte-Carlo runs
sig_acc_true = [0.3; 0.3; 0.3]; % true value of standard deviation of accelerometer noise
sig_gps_true = [3; 3; 3; 0.03; 0.03; 0.03]; % true value of standard deviation of GPS noise
sig_acc = [0.3; 0.3; 0.3]; % user input of standard deviation of accelerometer noise
sig_gps = [3; 3; 3; 0.03; 0.03; 0.03]; % user input of standard deviation of GPS noise
Q = [diag(0.25*dt^4*sig_acc.^2), zeros(3); zeros(3), diag(dt^2*sig_acc.^2)]; % process noise covariance matrix
R = [diag(sig_gps(1:3).^2), zeros(3); zeros(3), diag(sig_gps(4:6).^2)]; % measurement noise covariance matrix
F = [eye(3), eye(3)*dt; zeros(3), eye(3)]; % state transition matrix
B = [0.5*eye(3)*dt^2; eye(3)*dt]; % control-input matrix
H = eye(6); % measurement matrix
%% true trajectory
x_true = zeros(6,N+1); % true state
a_true = zeros(3,N); % true acceleration
x_true(:,1) = [0; 0; 0; 5; 5; 0]; % initial true state
for k = 2:1:N+1
x_true(:,k) = F*x_true(:,k-1) + B*a_true(:,k-1);
end
%% Kalman filter simulation
res_x_est = zeros(6,N+1,M); % Monte-Carlo estimates
res_x_err = zeros(6,N+1,M); % Monte-Carlo estimate errors
P_diag = zeros(6,N+1); % diagonal term of error covariance matrix
% filtering
for m = 1:1:M
% initial guess
x_est(:,1) = [2; -2; 0; 5; 5.1; 0.1];
P = [eye(3)*4^2, zeros(3); zeros(3), eye(3)*0.4^2];
P_diag(:,1) = diag(P);
for k = 2:1:N+1
%%% Prediction
% obtain acceleration output
u = a_true(:,k-1) + normrnd(0, sig_acc_true);
% predicted state estimate
x_est(:,k) = F*x_est(:,k-1) + B*u;
% predicted error covariance
P = F*P*F' + Q;
%%% Update
% obtain measurement
z = x_true(:,k) + normrnd(0, sig_gps_true);
% measurement residual
3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]彭剑,刘东文.改进扩展卡尔曼滤波器的PMSM参数辨识[J].现代信息科技,2023,7(10):66-69.DOI:10.19850/j.cnki.2096-4706.2023.10.017.
[2]廖楷娴. 改进扩展卡尔曼滤波器的永磁同步风力发电机参数辨识[D].湖南工业大学,2022.DOI:10.27730/d.cnki.ghngy.2022.000263.