狄克斯特拉算法-解决有向有权图的最短路径问题【完结篇】(算法快速入门-基于《算法图解》的算法入门教程(4))
目录
- 一、前言
- 二、使用狄克斯特拉算法
-
- 狄克斯特拉算法包含4个步骤:
-
- (1) 找出“最便宜”的节点,即可在最短时间内到达的节点。
- (2) 更新该节点的邻居的开销,我们将在稍后解释其含义。
- (3) 重复这个过程,直到对图中的每个节点我们都做过了以上的操作。
- (4) 大功告成!计算最终路径
- 三、具体拆分步骤:
-
- 第一个小步骤:找出最便宜的节点
- 第二个小步骤:计算经v5结点前往其各个邻居所需的时间
- 第三个小步骤:根据已到达结点,算出到达终点的最短路径
- 小结
- 四、术语详解
- 五、实现步骤
- 六、最终实现
一、前言
在前一节,我们找到了从v1到v4的最短路径。显然v1→v2→v5→v4和v1→v2→v5→v4是我们想要的最短路径——它们都只有4段。但如果我们给这些路径加上距离(权值),它们不见得依然是最短路径。

在前一章我们使用了广度优先搜索(即对应于第一张有向无权图),它找出的是段数最少的路径。如果我们要找出最快的路径,该怎么办呢?为此,可使用另一种算法——狄克斯特拉算法(Dijkstra’s algorithm)。
二、使用狄克斯特拉算法
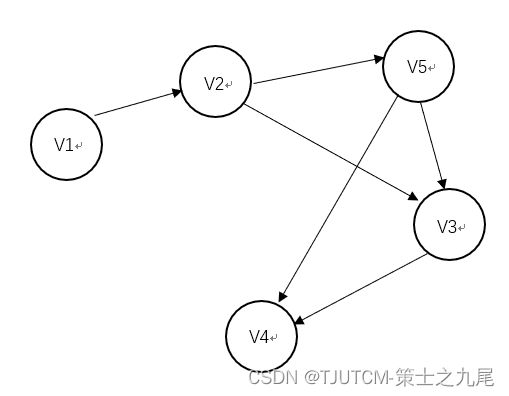
下面我们来看看如何对之前的有向有权图使用这种算法。

图中各边上的每个数字表示的都是时间(这里把单位都用分钟来表示),表示从起始节点到终止结点的距离(这里定义为权值)。为找出从起点v1到终点v4耗时最短的路径,我们将使用狄克斯特拉算法。
如果我们使用广度优先搜索,将得到这条段数最少的路径:v1→v2→v5→v3→v4。这条路径耗时7分钟。下面我们来检查一下,看看能否找到耗时更短的路径。
狄克斯特拉算法包含4个步骤:
(1) 找出“最便宜”的节点,即可在最短时间内到达的节点。
(2) 更新该节点的邻居的开销,我们将在稍后解释其含义。
(3) 重复这个过程,直到对图中的每个节点我们都做过了以上的操作。
(4) 大功告成!计算最终路径
三、具体拆分步骤:
第一个小步骤:找出最便宜的节点
①v1想要到达v4结点必须经过v2,所以我们先选择v2结点。
②到达v2结点后,我们可以选择v3或者v5结点。前往v3需要3分钟,而前往v5只需要1分钟。至于前往其他节点,我们现在还不知道需要多长时间。
由于我们还不知道前往终点需要多长时间,因此我们假设为无穷大。
而结点v5是最近的——我们只需要1分钟就能达到。
| 结点 | 耗时 |
|---|---|
| v3 | 6 |
| v5 | 4 |
| v4(终点) | ∞ |
第二个小步骤:计算经v5结点前往其各个邻居所需的时间
| 结点 | 耗时 |
|---|---|
| v3 | 5 |
| v5 | 4 |
| v4(终点) | 8 |
我们找到了一条前往结点v3的更短路径!
直接由结点v2前往结点v3需要6分钟,而我们由结点v2经过v5再前往v3只需要5分钟。
对于结点v2的邻居,如果找到前往下一个结点的更短路径,我们就更新其开销。在这一步,我们实现了:
①前往节点A的更短路径(时间从6分钟缩短到5分钟);
②前往终点的更短路径(时间从无穷大缩短到8分钟)。
第三个小步骤:根据已到达结点,算出到达终点的最短路径
我们现在已到达的结点为:结点v1、v2、v5、v3。现在,让我们更新到达终点v4的最短路径吧!
| 结点 | 耗时 |
|---|---|
| v3 | 5 |
| v5 | 4 |
| v4(终点) | 7 |
这里解释一下:因为我们前一步更新了到达结点v3的最短距离为5,在这一步我们通过v3到达终点v4,发现耗时(距离)只有7!所以我们更新结点、耗时表,将到达v4结点的耗时改为7。
小结
这里我们对狄克斯特拉算法做一个小结,狄克斯特拉算法包含4个步骤:
(1)找出最便宜的节点,即可在最短时间内前往的节点。
(2)对于该节点的邻居,检查是否有前往它们的更短路径,如果有,就更新其开销。
(3)重复这个过程,直到对图中的每个节点都这样做了。
(4)计算最终路径。
只要我们根据上述步骤,就能使用狄克斯特拉算法有效解决有向有权图的最短路径问题
四、术语详解
狄克斯特拉算法用于每条边都有关联数字的图,这些数字称为权重(weight)。
带权重的图称为加权图(weighted graph),不带权重的图称为非加权图(unweighted graph)。
要计算非加权图中的最短路径,可使用广度优先搜索。要计算加权图中的最短路径,可使用狄克斯特拉算法。
图还可能有环,这意味着我们可从一个节点出发,走一圈后又回到这个节点。我们只要每绕环一次,总权重都会增加。因此,绕环的路径不可能是最短的路径。
五、实现步骤
下面我们来看看如何使用代码来实现狄克斯特拉算法,这里以下面的图为例。
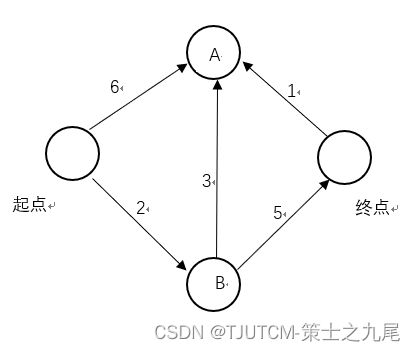
要编写解决这个问题的代码,我们需要两个散列表,它们分别为costs表和parents表:
| 结点 | 距离 |
|---|---|
| A | 6 |
| B | 2 |
| 终点 | ∞ |
| 结点 | 邻居 |
|---|---|
| A | 起点 |
| B | 起点 |
| 终点 | - |
随着算法的进行,你将不断更新散列表costs和parents。
之前,我们像下面这样将节点的所有邻居都存储在散列表中:
graph["v1"] = ["v2", "v3", "v4"]
但这里需要同时存储邻居和前往邻居的开销。例如,起点有两个邻居——A和B。
我们可以再用一个散列表实现这个要求。
graph["start"] = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
#这个散列表又包含散列表
因此graph[“start”]是一个散列表。要获取起点的所有邻居,我们可像下面这样做:
>>> print graph["start"].keys()
["a", "b"]
下面来添加其他节点及其邻居
graph["a"] = {}
graph["a"]["fin"] = 1
graph["b"] = {}
graph["b"]["a"] = 3
graph["b"]["fin"] = 5
graph["fin"] = {} #终点没有任何邻居
接下来,需要用一个散列表来存储每个节点的开销。
节点的开销指的是从起点出发前往该节点需要多长时间。我们知道,从起点到节点B需要2分钟,从起点到节点A需要6分钟(但你可能会找到所需时间更短的路径)。
可是,我们一开始是不知道到终点需要多长时间的。对于还不知道的开销,我们可以将其设置为无穷大,在Python中我们可以这样实现:
infinity = float("inf")
创建开销表的代码如下:
infinity = float("inf")
costs = {}
costs["a"] = 6
costs["b"] = 2
costs["fin"] = infinity
我们还需要一个存储父节点的散列表,创建这个散列表的代码如下:
parents = {}
parents["a"] = "start"
parents["b"] = "start"
parents["fin"] = None
最后,我们还需要一个数组,用于记录处理过的节点,因为对于同一个节点,不用处理多次。
六、最终实现
node = find_lowest_cost_node(costs) #在未处理的节点中找出开销最小的节点
while node is not None: #这个while循环在所有节点都被处理过后结束
cost = costs[node]
neighbors = graph[node]
for n in neighbors.keys(): #遍历当前节点的所有邻居
new_cost = cost + neighbors[n]
if costs[n] > new_cost:
#如果经当前节点前往该邻居更近,就更新该邻居的开销
#同时将该邻居的父节点设置为当前节点
costs[n] = new_cost
parents[n] = node #将当前节点标记为处理过
processed.append(node) #将当前节点标记为处理过
node = find_lowest_cost_node(costs) #找出接下来要处理的节点,并循环
def find_lowest_cost_node(costs):
lowest_cost = float("inf")
lowest_cost_node = None
for node in costs: #遍历所有的节点
cost = costs[node]
if cost < lowest_cost and node not in processed:
#如果当前节点的开销更低且未处理过
lowest_cost = cost #就将其视为开销最低的节点
lowest_cost_node = node
return lowest_cost_node
《算法图解》中还提到了关于贪心算法、动态规划、K最邻近算法等相关内容,虽然保留了本书一贯的讲解生动的特点,但我并不认为这能很好地帮助我们形成相应的知识框架。因此,本系列就到此为止了!
接下来我将着力于代码而非简单的算法入门思想,使用**《计算机算法设计与分析》**(第五版)(王晓东编著)这本书,并对其中的难题更新博客,感谢您的阅读,不久见!