GNN系列(一):简单图论&环境配置&PyG库
GNN系列(一)—简单图论&环境配置&PyG库
图卷积神经网络(GCN)是近年兴起的基于图结构的广义神经网络结构,图论中抽象意义上的图可以来表示非欧几里得机构化数据。本小节从三个部分开始图神经网络的学习和介绍:
- 图论概念引入
- 所需环境搭建
- PyG相关库的学习
一、图论部分
该部分主要介绍图的基本概念和基本的定义定理,这也是图与网络的基础。
定义1:图(Graph)
一集元素及它们之间的某种关系。具体地说,图是一个二元组 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},其中集合 V {\mathcal{V}} V称为 顶点集,集合 E {\mathcal{E}} E是 V {\mathcal{V}} V 中元素组成的某些无序对的集合,称为 边集。其中, V = { v 1 , … , v N } \mathcal{V}=\left\{v_{1}, \ldots, v_{N}\right\} V={v1,…,vN}是所有顶点的集合, E = { e 1 , … , e M } \mathcal{E}=\left\{e_{1}, \ldots, e_{M}\right\} E={e1,…,eM} 是数量为 M M M 的边的集合。
如下图是一个图的例子:
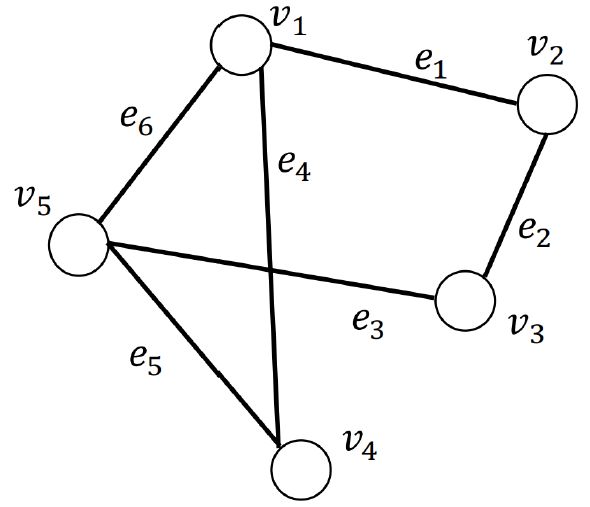
在现实世界中图可以用来表示实体之间的关系;节点和边的信息可以是 类别型的(categorical),类别型数据的取值只能是哪一类别。一般称类别型的信息为 标签(label);节点和边的信息可以是 数值型的(numeric),类别型数据的取值范围为实数。一般称类别型的信息为 属性(attribute);大部分情况中,节点含有信息,边可能含有信息。
定义二(图的邻接矩阵):
给定一个图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},其对应的 邻接矩阵被记为 A ∈ { 0 , 1 } N × N \mathbf{A} \in\{0,1\}^{N \times N} A∈{0,1}N×N。 A i , j = 1 \mathbf{A}_{i, j}=1 Ai,j=1表示存在从结点 v i v_i vi到 v j v_j vj的边,反之表示不存在从结点 v i v_i vi到 v j v_j vj的边。注意:在 无向图中,从结点 v i v_i vi到 v j v_j vj的边存在,意味着从结点 v j v_j vj到 v i v_i vi的边也存在。因而 无向图的邻接矩阵是对称的。在 无权图中, 各条边的权重被认为是等价的,即认为 各条边的权重为 1 1 1。对于 有权图,其对应的邻接矩阵通常被记为 W ∈ { 0 , 1 } N × N \mathbf{W} \in\{0,1\}^{N \times N} W∈{0,1}N×N,其中 W i , j = w i j \mathbf{W}_{i, j}=w_{ij} Wi,j=wij表示从结点 v i v_i vi到 v j v_j vj的边的权重。若边不存在时,边的权重为 0 0 0。
在上图中,邻接矩阵为:
A = ( 0 1 0 1 1 1 0 1 0 0 0 1 0 0 1 1 0 0 0 1 1 0 1 1 0 ) \mathbf{A}=\left(\begin{array}{lllll} 0 & 1 & 0 & 1 & 1 \\ 1 & 0 & 1 & 0 & 0 \\ 0 & 1 & 0 & 0 & 1 \\ 1 & 0 & 0 & 0 & 1 \\ 1 & 0 & 1 & 1 & 0 \end{array}\right) A=⎝⎜⎜⎜⎜⎛0101110100010011000110110⎠⎟⎟⎟⎟⎞
定义三(结点的度,degree):
- 对于有向有权图,结点 v i v_i vi的出度(out degree)等于从 v i v_i vi出发的边的权重之和,结点 v i v_i vi的入度(in degree)等于从连向 v i v_i vi的边的权重之和。
- 无向图是有向图的特殊情况,结点的出度与入度相等。
- 无权图是有权图的特殊情况,各边的权重为 1 1 1,那么结点 v i v_i vi的出度(out degree)等于从 v i v_i vi出发的边的数量,结点 v i v_i vi的入度(in degree)等于从连向 v i v_i vi的边的数量。
- 结点 v i v_i vi的度记为 d ( v i ) d(v_i) d(vi),入度记为 d i n ( v i ) d_{in}(v_i) din(vi),出度记为 d o u t ( v i ) d_{out}(v_i) dout(vi)。
定义四(邻接结点,neighbors):
结点 v i v_i vi的邻接结点为与结点 v i v_i vi直接相连的结点,其被记为 N ( v i ) \mathcal{N(v_i)} N(vi)。 结点 v i v_i vi的 k k k跳远的邻接节点 (neighbors with k k k-hop) 指的是到结点 v i v_i vi要走 k k k步的节点(一个节点的 2 2 2跳远的邻接节点包含了自身)。
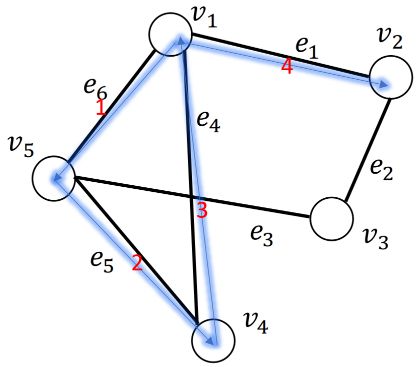
定义五(行走,walk):
w a l k ( v 1 , v 2 ) = ( v 1 , e 6 , e 5 , e 4 , e 1 , v 2 ) walk(v_1, v_2) = (v_1, e_6,e_5,e_4,e_1,v_2) walk(v1,v2)=(v1,e6,e5,e4,e1,v2) ,这是一次“行走”,它是一次从节点 v 1 v_1 v1 出发,依次经过边 e 6 , e 5 , e 4 , e 1 e_6,e_5,e_4,e_1 e6,e5,e4,e1 ,最终到达节点 v 2 v_2 v2 的“行走”。下图所示为 w a l k ( v 1 , v 2 ) = ( v 1 , e 6 , e 5 , e 4 , e 1 , v 2 ) walk(v_1, v_2) = (v_1, e_6,e_5,e_4,e_1,v_2) walk(v1,v2)=(v1,e6,e5,e4,e1,v2) ,其中红色数字标识了边的访问序号。在“ 行走 ”中,节点是运行重复的。
定理六:
- 有一图,其邻接矩阵为 A \mathbf{A} A, A n \mathbf{A}^{n} An为邻接矩阵的 n n n次方,那么 A n [ i , j ] \mathbf{A}^{n}[i,j] An[i,j]等于从结点 v i v_i vi到结点 v j v_j vj的长度为 n n n的行走的个数。
定义七(路径,path):
- “路径”是结点不可重复的“行走”。
定义八(子图,subgraph):
- 有一图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},另有一图 G ′ = { V ′ , E ′ } \mathcal{G}^{\prime}=\{\mathcal{V}^{\prime}, \mathcal{E}^{\prime}\} G′={V′,E′},其中 V ′ ∈ V \mathcal{V}^{\prime} \in \mathcal{V} V′∈V, E ′ ∈ E \mathcal{E}^{\prime} \in \mathcal{E} E′∈E并且 V ′ \mathcal{V}^{\prime} V′不包含 E ′ \mathcal{E}^{\prime} E′中未出现过的结点,那么 G ′ \mathcal{G}^{\prime} G′是 G \mathcal{G} G的子图。
定义九(连通分量,connected component):
给定图 G ′ = { V ′ , E ′ } \mathcal{G}^{\prime}=\{\mathcal{V}^{\prime}, \mathcal{E}^{\prime}\} G′={V′,E′}是图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E}的子图。记属于图 G \mathcal{G} G但不属于 G ′ \mathcal{G}^{\prime} G′图的结点集合记为 V / V ′ \mathcal{V}/\mathcal{V}^{\prime} V/V′ 。如果属于 V ′ \mathcal{V}^{\prime} V′的任意结点对之间存在至少一条路径,但不存在一条边连接属于 V ′ \mathcal{V}^{\prime} V′的结点与属于 V / V ′ \mathcal{V}/\mathcal{V}^{\prime} V/V′的结点,那么图 G ′ \mathcal{G}^{\prime} G′是图 G \mathcal{G} G的连通分量。
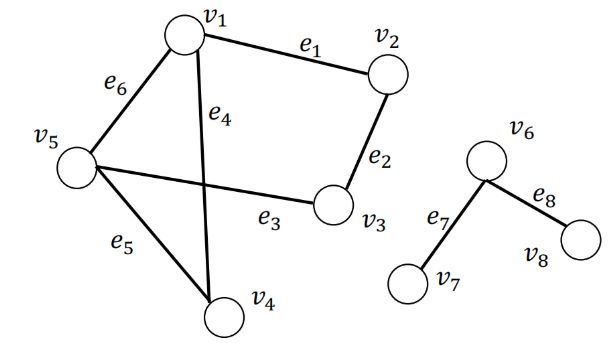
左右两边子图都是整图的连通分量。
定义十(连通图,connected graph):
- 当一个图只包含一个连通分量,即其自身,那么该图是一个连通图。
定义十一(最短路径,shortest path):
- v s , v t ∈ V v_{s}, v_{t} \in \mathcal{V} vs,vt∈V 是图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E}上的一对结点,结点对 v s , v t ∈ V v_{s}, v_{t} \in \mathcal{V} vs,vt∈V之间所有路径的集合记为 P s t \mathcal{P}_{\mathrm{st}} Pst。结点对 v s , v t v_{s}, v_{t} vs,vt之间的最短路径 p s t s p p_{\mathrm{s} t}^{\mathrm{sp}} pstsp为 P s t \mathcal{P}_{\mathrm{st}} Pst中长度最短的一条路径,其形式化定义为
p s t s p = arg min p ∈ P s t ∣ p ∣ p_{\mathrm{s} t}^{\mathrm{sp}}=\arg \min _{p \in \mathcal{P}_{\mathrm{st}}}|p| pstsp=argp∈Pstmin∣p∣
其中, p p p表示 P s t \mathcal{P}_{\mathrm{st}} Pst中的一条路径, ∣ p ∣ |p| ∣p∣是路径 p p p的长度。
定义十二(直径,diameter):
- 给定一个连通图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},其直径为其所有结点对之间的最短路径的最小值,形式化定义为
diameter ( G ) = max v s , v t ∈ V min p ∈ P s t ∣ p ∣ \operatorname{diameter}(\mathcal{G})=\max _{v_{s}, v_{t} \in \mathcal{V}} \min _{p \in \mathcal{P}_{s t}}|p| diameter(G)=vs,vt∈Vmaxp∈Pstmin∣p∣
定义十三(拉普拉斯矩阵,Laplacian Matrix):
- 给定一个图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},其邻接矩阵为 A A A,其拉普拉斯矩阵定义为 L = D − A \mathbf{L=D-A} L=D−A,其中 D = d i a g ( d ( v 1 ) , ⋯ , d ( v N ) ) \mathbf{D=diag(d(v_1), \cdots, d(v_N))} D=diag(d(v1),⋯,d(vN))。
定义十四(对称归一化的拉普拉斯矩阵,Symmetric normalized Laplacian):
- 给定一个图 G = { V , E } \mathcal{G}=\{\mathcal{V}, \mathcal{E}\} G={V,E},其邻接矩阵为 A A A,其规范化的拉普拉斯矩阵定义为
L = D − 1 2 ( D − A ) D − 1 2 = I − D − 1 2 A D − 1 2 \mathbf{L=D^{-\frac{1}{2}}(D-A)D^{-\frac{1}{2}}=I-D^{-\frac{1}{2}}AD^{-\frac{1}{2}}} L=D−21(D−A)D−21=I−D−21AD−21
二、环境配置
本小节采用Anaconda+vs code+pytorch配置图神经网络的运行环境。首先确保pytorch环境能正常运行,可以通过GPU或者CPU来进行配置pytorch,具体配置过程参考pytorch官网,这里不过多介绍。通过如下代码看其版本号:
import torch
print(torch.__version__)
配置图神经网络相关库PyG:PyTorch Geometric (PyG)是面向几何深度学习的PyTorch的扩展库,几何深度学习指的是应用于图和其他不规则、非结构化数据的深度学习。基于PyG库,我们可以轻松地根据数据生成一个图对象,然后很方便的使用它;我们也可以容易地为一个图数据集构造一个数据集类,然后很方便的将它用于神经网络。
CPU版的pytorch可通过如下的程序依次安装相应的包:
pip install torch-scatter -f https://pytorch-geometric.com/whl/torch-1.8.0+cpu.html
pip install torch-sparse -f https://pytorch-geometric.com/whl/torch-1.8.0+cpu.html
pip install torch-cluster -f https://pytorch-geometric.com/whl/torch-1.8.0+cpu.html
pip install torch-spline-conv -f https://pytorch-geometric.com/whl/torch-1.8.0+cpu.html
pip install torch-geometric
Data类——PyG中图的表示及其使用
Data对象的创建
Data类的官方文档为torch_geometric.data.Data。
edge_index的每一列定义一条边,其中第一行为边起始节点的索引,第二行为边结束节点的索引。这种表示方法被称为COO格式(coordinate format),通常用于表示稀疏矩阵。PyG不是用稠密矩阵 A ∈ { 0 , 1 } ∣ V ∣ × ∣ V ∣ \mathbf{A} \in \{ 0, 1 \}^{|\mathcal{V}| \times |\mathcal{V}|} A∈{0,1}∣V∣×∣V∣来持有邻接矩阵的信息,而是用仅存储邻接矩阵 A \mathbf{A} A中非 0 0 0元素的稀疏矩阵来表示图。
通常,一个图至少包含x, edge_index, edge_attr, y, num_nodes5个属性,当图包含其他属性时,我们可以通过指定额外的参数使Data对象包含其他的属性:
graph = Data(x=x, edge_index=edge_index, edge_attr=edge_attr, y=y, num_nodes=num_nodes, other_attr=other_attr)
获取Data对象属性
x = graph_data['x']
设置Data对象属性
graph_data['x'] = x
获取Data对象包含的属性的关键字
graph_data.keys()
对边排序并移除重复的边
graph_data.coalesce()
Data对象的其他性质
我们通过观察PyG中内置的一个图来查看Data对象的性质:
from torch_geometric.datasets import KarateClub
dataset = KarateClub()
data = dataset[0] # Get the first graph object.
print(data)
print('==============================================================')
# 获取图的一些信息
print(f'Number of nodes: {data.num_nodes}') # 节点数量
print(f'Number of edges: {data.num_edges}') # 边数量
print(f'Number of node features: {data.num_node_features}') # 节点属性的维度
print(f'Number of node features: {data.num_features}') # 同样是节点属性的维度
print(f'Number of edge features: {data.num_edge_features}') # 边属性的维度
print(f'Average node degree: {data.num_edges / data.num_nodes:.2f}') # 平均节点度
print(f'if edge indices are ordered and do not contain duplicate entries.: {data.is_coalesced()}') # 是否边是有序的同时不含有重复的边
print(f'Number of training nodes: {data.train_mask.sum()}') # 用作训练集的节点
print(f'Training node label rate: {int(data.train_mask.sum()) / data.num_nodes:.2f}') # 用作训练集的节点的数量
print(f'Contains isolated nodes: {data.contains_isolated_nodes()}') # 此图是否包含孤立的节点
print(f'Contains self-loops: {data.contains_self_loops()}') # 此图是否包含自环的边
print(f'Is undirected: {data.is_undirected()}') # 此图是否是无向图
四、Dataset类——PyG中图数据集的表示及其使用
PyG内置了大量常用的基准数据集,接下来我们以PyG内置的Planetoid数据集为例,来学习PyG中图数据集的表示及使用。
Planetoid数据集类的官方文档为torch_geometric.datasets.Planetoid。
生成数据集对象并分析数据集
如下方代码所示,在PyG中生成一个数据集是简单直接的。在第一次生成PyG内置的数据集时,程序首先下载原始文件,然后将原始文件处理成包含Data对象的Dataset对象并保存到文件。
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='/dataset/Cora', name='Cora')
len(dataset) #1
dataset.num_classes #7
dataset.num_node_features #1433
分析数据集中样本
可以看到该数据集只有一个图,包含7个分类任务,节点的属性为1433维度。
data = dataset[0]
# Data(edge_index=[2, 10556], test_mask=[2708],train_mask=[2708], val_mask=[2708], x=[2708,1433], y=[2708])
data.is_undirected()# True
data.train_mask.sum().item()# 140
data.val_mask.sum().item()# 500
data.test_mask.sum().item()# 1000
现在我们看到该数据集包含的唯一的图,有2708个节点,节点特征为1433维,有10556条边,有140个用作训练集的节点,有500个用作验证集的节点,有1000个用作测试集的节点。
数据集的使用
在学习了 PyTorch Geometric 中的数据处理、数据集、加载器和转换之后,是时候实现第一个图神经网络了!
import torch
from torch_geometric.datasets import Planetoid #加载 Cora 数据集
dataset = Planetoid(root='./tmp/Cora', name='Cora')
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
#实现一个两层的 GCN
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = GCNConv(dataset.num_node_features, 16)
self.conv2 = GCNConv(16, dataset.num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
/*
构造函数定义两个GCNConv层,在网络前向传递中被调用。非线性并未集成到conv调用中,
需要在之后应用。使用 ReLU 作为中间非线性,并类数上输出一个 softmax 分布。
在训练节点上训练这个模型 200 个 epochs:
*/
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = Net().to(device)
data = dataset[0]
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
model.train()
for epoch in range(200):
optimizer.zero_grad()
out = model(data)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
model.eval()
_, pred = model(data).max(dim=1)
correct = int(pred[data.test_mask].eq(data.y[data.test_mask]).sum().item())
acc = correct / int(data.test_mask.sum())
print('Accuracy: {:.4f}'.format(acc))
最后输出结果为:
Accuracy: 0.8090
参考资料
- [1] Pytorch geometric
- [2]Chapter 2 - Foundations of Graphs, Deep Learning on Graphs
- [3]Datawhale图神经网络开源讲义