AI作业4-无监督学习
K均值聚类 (K-means)
聚类
首先我们回顾下:聚类任务为将数据集中的样本划分为若干个通常是不相交的子集中,这些子集称为样本簇
k均值聚类(k-means clustering algorithm)
- k均值聚类是一种迭代求解的聚类分析算法,是最基础和最常用的聚类算法之一(无监督学习),它将数据集中某些相似地方的数据特征进行分组、组织的过程。首先先将数据分为K组,然后随机选取K个对象作为初始的聚类中心,然后计算每个对象与各个种子聚类中心之间的距离,把每个对象分配给距离它最近的聚类中心。其基本思想是通过迭代方式寻找K个簇(Cluster)的一种划分方案,使得聚类结果对应的代价函数最小。

算法步骤:
# 伪代码
function K-Means(输入数据,中心点个数K)
获取输入数据的维度Dim和个数N
随机生成K个Dim维的点
while(算法未收敛)
对N个点:计算每个点属于哪一类。
对于K个中心点:
1,找出所有属于自己这一类的所有数据点
2,把自己的坐标修改为这些数据点的中心点坐标
end
输出结果:
end
(可)参考链接:
k-means法を理解する
非监督学习: K 均值聚类(原理、步骤、优缺点、调优)
聚类方法:k均值聚类、层次聚类
sklearn(六)-K-Means k均值聚类算法
机器学习十大经典算法之K-Means聚类算法
K均值聚类是生成式还是判别式方法?
回顾:生成式方法是指通过学习样本数据的分布,来得到联合概率分布P(X,Y),然后求出条件概率分布P(Y|X)。判别式方法是指直接学习决策函数f(X),或者条件概率分布P(Y|X),从而得到对输入X的输出Y。
简单来说判别式模型则是直接建立一个输入和输出之间的映射关系,它的目的是寻找一个决策边界来区分不同的数据。
Obviously, K均值聚类是一种判别式方法,它通过将数据分为K个簇来进行聚类,区分的边界就是这些类簇距离中心的距离所形成的“边界”。
KNN VS. K-means
回顾KNN & K-means:
- K-means 参见上文
- KNN:k近邻法(k-nearest neighbor,k-NN)是一种基本的分类和回归方法,是监督学习方法里的一种常用方法。k近邻算法假设给定一个训练数据集,其中的实例类别已定。分类时,对新的实例,根据其k个最近邻的训练实例类别,通过多数表决等方式进行预测。即(物以类聚,人以群分)
区别
- K-means是聚类算法;KNN是分类算法。
- K-means是无监督学习(样本没有标签);KNN是监督学习(一部分样本要有标签)。
- Kmeans中的K,表示分成K簇;KNN中的K,表示寻找与测试数据最近的K个样本。
- Kmeans有明显的前期训练过程;KNN没有明显的前期训练过程。
- Kmeans对异常值敏感,KNN对异常值不敏感
- Kmeans可以进行多分类,KNN样本只能归为一类,不适合多分类任务;
(可)参考链接://从KNN & K-means 的优缺点中我们就可以很容易的看出两者的区别
KNN和Kmeans比较
机器学习:KNN原理及其改进
【机器学习】K-means(非常详细)
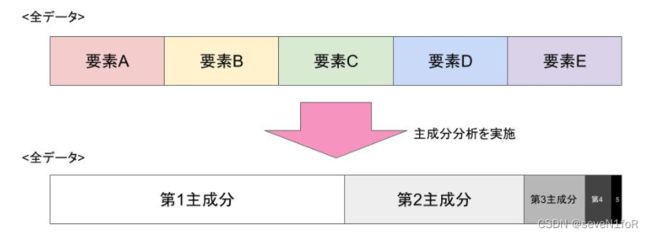
主成分分析(PCA)
主成分分析(PCA,Principal Component Analysis)是一种使用最广泛的数据降维算法。它是一种统计学方法,用于将多个相关变量压缩为少数几个无关变量,称为主成分,以便更好地解释数据。PCA是一种无监督学习方法,因为它不需要任何关于数据的先验知识或标签。主成分分析的主要思想是将n维特征映射到k维上,这k维是全新的正交特征也被称为主成分,是在原有n维特征的基础上重新构造出来的k维特征。
用处:PCA可以用于多种应用程序,例如图像处理、模式识别、数据压缩和信号处理。在图像处理中,PCA可用于减少图像中的噪声和增强图像中的特定特征。在模式识别中,主成分分析可用于识别数据集中的模式和类别。在数据压缩中,主成分分析可用于减少数据集的大小,并提高计算效率。在信号处理中,主成分分析可用于提取信号中的重要信息,并减少噪声和干扰。
(可)参考链接:
主成分分析とは? 例を使って活用方法とメリットをわかりやすく解説
【主成分分析是什么?使用例子简单的理解使用方法】(NTT日本语文章有阅读门槛)
主成分分析(PCA)原理详解
LDA VS. PCA
LDA(线性判别分析)回顾:**最大化类间均值,最小化类内方差。**将数据投影在低维度上,并且投影后同类别别数据的投影点尽可能的接近,不同类别数据的投影点的中心点尽可能的远。
二者区别:
- LDA是监督学习的方法,PCA是无监督学习的方法
- 如上文所述LDA最大化类间均值,最小化类内方差;PCA将高维数据投影到低维空间中,同时保持最大方差。
- LDA考虑了类别信息,在降维过程中尽可能提高不同类别之间的可分性;
- PCA只考虑数据的方差,通过保留数据中最主要的特征或方向,将数据投影到低维空间中
- LDA也常用于分类问题的特征提取,PCA则更常用于数据可视化和去噪。
(可)参考链接:
上期博客:AI作业2-监督学习
奇异值分解(SVD)
回顾特征值和特征向量
- 特征值(eigenvalue)是一个数,是方阵矩阵与一个非零向量相乘的结果,其结果是这个向量的线性倍数,即原向量在这个矩阵的变换下的放缩因子。如果一个矩阵 A 有特征值 λ,那么对应的特征向量(eigenvector)v 就满足 Av = λv,其中 v 是非零向量。也就是说,对于矩阵 A 和特征向量 v,矩阵 A 对向量 v 进行的线性变换只是对 v 进行了伸缩,并没有改变其方向。
- 特征向量(eigenvector)是指在进行线性变换时,其方向不发生变化的向量。特征向量可以看作是在变换中保持不变的方向,而特征值则表示这个方向上的放缩因子。特征向量可以通过求解矩阵 A 减去 λI(其中 I 为单位矩阵)的行列式等于 0 的方程组得到,其中 λ 是 A 的特征值。
奇异值分解(SVD)
- 奇异值分解(Singular Value Decomposition,以下简称SVD)是在机器学习领域广泛应用的算法,它不光可以用于降维算法中的特征分解,还可以用于推荐系统,以及自然语言处理等领域。是很多机器学习算法的基石。
- SVD是一种线性代数的方法,用于将一个矩阵分解成三个矩阵的乘积的形式,即 A = U Σ V T A=U\Sigma V^T A=UΣVT,其中 A A A 是一个 m × n m\times n m×n 的实数矩阵, U U U 和 V V V 是两个正交矩阵, Σ \Sigma Σ 是一个 m × n m\times n m×n 的对角矩阵,其对角线上的元素称为奇异值。
- 优点:是能够处理各种形状和大小的矩阵,并且可以捕捉数据集的主要特征。它还可以通过保留前 k k k 个奇异值,对矩阵进行压缩,减少存储空间和计算成本。
- 缺点:对于大型矩阵,SVD 的计算成本较高,可能需要很长时间才能完成计算。此外,在实践中,SVD 的输出通常是稠密的,因此对于大型稀疏矩阵,可能需要使用其他方法。
(可)参考链接:
奇异值分解(SVD)
SVD使用场景见下↓
特征人脸方法(Eigenface)
特征人脸方法(Eigenface)是一种用于人脸识别的计算机视觉问题的方法,它利用了一组特征向量来表示人脸。这种方法是由 Sirovich 和 Kirby 提出的,并由 Turk 和 Pentland 用于人脸分类。特征向量是从人脸图像的协方差矩阵中求出的,再从中捕捉人脸的主要变化。
PCA 的几何解释
- 找到一组新的坐标轴,或者说是一组新的基(basis),用于表示原来的数据,使得在表示数据时不同轴是不相关的(即协方差为0)。
- 取出其中含有信息较多(即方差较大)的坐标轴(基),构成(span)一个新的空间,舍弃其他维度的信息。
- 由于新空间的维度小于原来的空间,所以把数据投影到新的空间后,可以大大降低数据的复杂度(虽然会损失少量信息)。
PCA 的大致思路PCA 的大致思路
- 样本中心化:算出数据在每一个维度上的平均值,让该维数值减去这个平均值,中心化不会改变求得的新空间,但会减少计算量。
- 对中心化后的数据,算出这些数据的协方差矩阵。协方差矩阵的含义:第 i 行 k 列的值,表示 i k 对应的两个方向(坐标轴)的协方差。
- 对协方差矩阵进行对角化,即算出协方差矩阵的特征值与特征向量。
含义:对角化意味着非对角线元素为0,也就意味着不同坐标轴(不同方向)之间两两互不相关(协方差为0)。而协方差矩阵对角线上元素,就是数据在各个方向上的方差(也是特征值),方差越大意味着数据在这个方向上的散度越大,也就意味着这个方向包含的信息更多。- 取特征值大的一些特征向量构成一个矩阵 P,这个矩阵是一个投影矩阵:能够把原始空间的数据投影到新的空间。
(可)参考链接:
基于 PCA 的人脸识别方法——特征脸法[1]
潜在语义分析 (LSA)
潜在语义分析(Latent Semantic Analysis,LSA)是一种自然语言处理技术,属于分布式语义学的范畴,它通过生成一组与文档和词语相关的概念,来分析一组文档和它们包含的词语之间的关系。LSA 假设意思相近的词语会出现在相似的文本片段中,因此可以通过统计词语在文档中的共现情况,来推断词语之间的语义相似度。
- 当生成了词汇-文档矩阵后,LSA提供了一种对它的低维近似(可以通过对字词—文档矩阵的奇异值分解(SVD)来实现)。做这种近似有以下几种原因:
- 对原始的词汇-文档矩阵进行计算时,计算量太大。而低维矩阵提供了一种近似(尽量少但却不可避免地有一些信息丢失)。
- 原始的矩阵一般包含噪声(垃圾信息)。在这种意义上,近似的低维矩阵是一种去噪矩阵(比原始矩阵更好)。
- 原始的词汇-文档矩阵过度地稀疏。它罗列了每篇文档中的实际出现的词汇,而由于同义词的存在,我们关心的是所有地与文档有关系的词汇集合,这个集合一般要比实际出现的词汇集合要大得多。
(可)参考链接:
LSA潜在语义分析的原理、公式推导和应用
wiki——潜在语义学
期望最大化算法(EM)
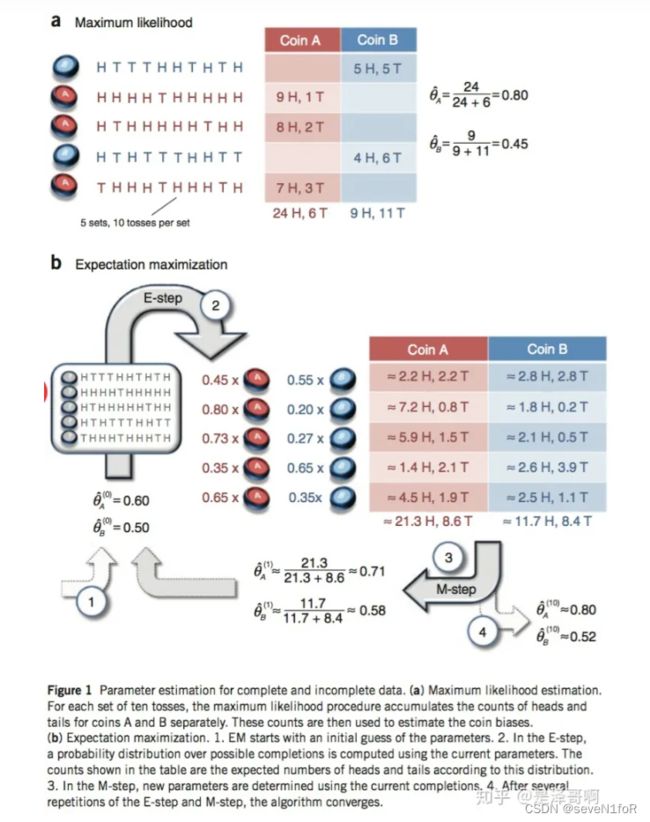
期望最大化算法(Expectation-Maximization,EM)是一种迭代算法,用于含有隐变量(Hidden Variable)的概率参数模型的最大似然估计或极大后验概率估计。
EM算法的基本思想是:在每次迭代中,先根据当前的参数估计值计算隐变量的期望值(E步),然后根据期望值最大化参数的对数似然函数(M步),重复这个过程直到收敛。如下图(下称 图_EM ):
EM算法的步骤
- EM算法的优点有:
它可以有效地处理含有隐变量的复杂模型,如高斯混合模型、隐马尔可夫模型等。
它可以保证每次迭代都不会降低似然函数的值,即具有单调递增性。
它可以利用局部信息进行参数更新,而不需要全局信息,因此可以节省计算资源。- EM算法的缺点有:
它需要指定初始参数值,而这些值可能会影响算法的收敛速度和结果。
它可能会陷入局部最优解,而不是全局最优解。即可能会收敛到一个奇异点(singular point),即似然函数的极限值,而不是最大值。
(可)参考链接:
EM算法及其推广
【机器学习】EM——期望最大(非常详细)
EM算法详解
什么是 EM 算法(最大期望算法)?【知多少】
K-means是最简单的EM算法?
不完全正确。K-means算法是一种特殊的EM算法,它可以看作是对高斯混合模型(Gaussian Mixture Model,GMM)的简化。K-means算法假设每个类别的协方差矩阵是单位矩阵,即每个类别的数据分布是各向同性的(isotropic),并且每个类别的先验概率相等。在这些假设下,K-means算法的E步和M步可以简化为:
- E步:根据当前的类别中心,将每个数据点分配到距离最近的类别中。
- M步:根据当前的数据点分配,更新每个类别的中心为该类别数据点的均值。
因此,K-means算法可以看作是EM算法的一种特例,但不是最简单的EM算法。
编程实现EM算法
源码-参考链接:数据为 图_EM 的硬币抛掷结果
# -*- coding: utf-8 -*-
# @File : EMAlgorithm.py
# @Time : 2023/4/8 18:59
# @Author : seveN1foR
# @Version : 1.0
# @Software: PyCharm
# @Contact : [email protected]
# here put the import lib
import numpy as np
from scipy import stats
# 硬币投掷结果观测序列
observations = np.array([[1, 0, 0, 0, 1, 1, 0, 1, 0, 1],
[1, 1, 1, 1, 0, 1, 1, 1, 1, 1],
[1, 0, 1, 1, 1, 1, 1, 0, 1, 1],
[1, 0, 1, 0, 0, 0, 1, 1, 0, 0],
[0, 1, 1, 1, 0, 1, 1, 1, 0, 1]])
def em_single(priors, observations):
"""
EM算法单次迭代
Arguments
---------
priors : [theta_A, theta_B]
observations : [m X n matrix]
Returns
--------
new_priors: [new_theta_A, new_theta_B]
:param priors:
:param observations:
:return:
"""
counts = {'A': {'H': 0, 'T': 0}, 'B': {'H': 0, 'T': 0}}
theta_A = priors[0]
theta_B = priors[1]
# E step
for observation in observations:
len_observation = len(observation)
num_heads = observation.sum()
num_tails = len_observation - num_heads
contribution_A = stats.binom.pmf(num_heads, len_observation, theta_A)
contribution_B = stats.binom.pmf(num_heads, len_observation, theta_B) # 两个二项分布
weight_A = contribution_A / (contribution_A + contribution_B)
weight_B = contribution_B / (contribution_A + contribution_B)
# 更新在当前参数下A、B硬币产生的正反面次数
counts['A']['H'] += weight_A * num_heads
counts['A']['T'] += weight_A * num_tails
counts['B']['H'] += weight_B * num_heads
counts['B']['T'] += weight_B * num_tails
# M step
new_theta_A = counts['A']['H'] / (counts['A']['H'] + counts['A']['T'])
new_theta_B = counts['B']['H'] / (counts['B']['H'] + counts['B']['T'])
return [new_theta_A, new_theta_B]
def em(observations, prior, tol=1e-6, iterations=10000):
"""
EM算法
:param observations: 观测数据
:param prior: 模型初值
:param tol: 迭代结束阈值
:param iterations: 最大迭代次数
:return: 局部最优的模型参数
"""
iteration = 0
while iteration < iterations:
new_prior = em_single(prior, observations)
delta_change = np.abs(prior[0] - new_prior[0])
if delta_change < tol:
break
else:
prior = new_prior
iteration += 1
return [new_prior, iteration]
print(em(observations, [0.6, 0.5]))
- 运行结果:

对其中的数据稍作修改

结果:

两者相等的情况下会出现问题:


可见,这里只迭代了一次,且只要两者相同时便会出现这样的情况。
提高释放阈值:
tol=1e-12,//迭代结束阈值

可见,迭代次数增长,且数据的位数更多了。