模拟行走机器人-python
leetcode第874题
链接https://leetcode.cn/problems/walking-robot-simulation
机器人在一个无限大小的 XY 网格平面上行走,从点 (0, 0) 处开始出发,面向北方。该机器人可以接收以下三种类型的命令 commands :
- -2 :向左转 90 度
- -1 :向右转 90 度
- 1 <= x <= 9 :向前移动 x 个单位长度
在网格上有一些格子被视为障碍物 obstacles 。第 i 个障碍物位于网格点 obstacles[i] = (xi, yi) 。
机器人无法走到障碍物上,它将会停留在障碍物的前一个网格方块上,但仍然可以继续尝试进行该路线的其余部分。返回从原点到机器人所有经过的路径点(坐标为整数)的最大欧式距离的平方。(即,如果距离为 5 ,则返回 25 )
注意:
北表示 +Y 方向。
东表示 +X 方向。
南表示 -Y 方向。
西表示 -X 方向。
示例 1:
输入:commands = [4,-1,3], obstacles = []
输出:25
解释:
机器人开始位于 (0, 0):
1. 向北移动 4 个单位,到达 (0, 4)
2. 右转
3. 向东移动 3 个单位,到达 (3, 4)
距离原点最远的是 (3, 4) ,距离为 32 + 42 = 25
示例 2:
输入:commands = [4,-1,4,-2,4], obstacles = [[2,4]]
输出:65
解释:机器人开始位于 (0, 0):
1. 向北移动 4 个单位,到达 (0, 4)
2. 右转
3. 向东移动 1 个单位,然后被位于 (2, 4) 的障碍物阻挡,机器人停在 (1, 4)
4. 左转
5. 向北走 4 个单位,到达 (1, 8)
距离原点最远的是 (1, 8) ,距离为 12 + 82 = 65
提示:
- 1 <= commands.length <= 10^4
- commands[i] is one of the values in the list [-2,-1,1,2,3,4,5,6,7,8,9].
- 0 <= obstacles.length <= 10^4
- -3 * 104 <= xi, yi <= 3 * 10^4
- 答案保证小于 2^31
首先考虑暴力法,看全部遍历一遍能否获得答案
先将所有commands取出,然后直接对坐标一步到位进行移动,这显然是不好做的,因为一步到位的话,中间是否会遇到路障还不知道,如果遇到了,最后还得退到第一个路障,而且最终返回的是路径上距离原点最远的点,这已经暗示了想一步到位不太可能,应该一步一步地走。
那么一步一步的方式该如何实现,如何感知方向的变化应该是重点
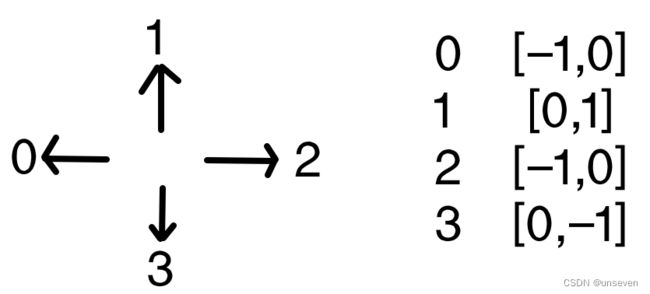
我们将方向定义为0~3一共四个,当右转时加1,当左转时减1,四个方向对应不同的移动方向,可以用二维列表的下标来对应。
直接遍历所有的操作,如果碰到了路障就停止这个操作。
给出第一版的代码
class Solution:
def robotSim(self, commands: [int], obstacles: [[int]]) -> int:
d = [[-1,0],[0,1],[1,0],[0,-1]]
toward,px,py,res=1,0,0,0
for each in commands:
if each < 0:
toward += 1 if each == -1 else -1
toward %= 4
else:
for i in range(each):
if [px + d[toward][0],py + d[toward][1]] in obstacles:
break
px += d[toward][0]
py += d[toward][1]
res = max(res,px**2+py**2)
return res
然而这将碰到超时的问题,主要是在判断前面是不是有障碍物,将障碍物列表改为集合类型即可
class Solution:
def robotSim(self, commands: [int], obstacles: [[int]]) -> int:
d = [[-1,0],[0,1],[1,0],[0,-1]]
toward,px,py,res=1,0,0,0
obstacles = [tuple(i) for i in obstacles]
obstacles = set(obstacles)
for each in commands:
if each < 0:
toward += 1 if each == -1 else -1
toward %= 4
else:
for i in range(each):
if tuple([px + d[toward][0],py + d[toward][1]]) in obstacles:
break
px += d[toward][0]
py += d[toward][1]
res = max(res,px**2+py**2)
return res
在set中查找某一个元素是否存在的实现函数。但是不同的是,set中元素的查找是通过hash来进行的,所以in set的时间复杂度只有差不多O(1),这是不发生碰撞时的最优情况。
可以参考这篇博客:传送门