#include "iostream"
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
void drawline(Mat img, vector lines, double rows, double cols,Scalar scalar)
{
Point p1, p2;
for (int i = 0; i < lines.size(); i++)
{
float jl = lines[i][0];
float jd = lines[i][1];
double a = cos(jd);
double b = sin(jd);
double x0 = jl * a;
double y0 = jl * b;
double len = max(rows, cols);
p1.x = cvRound(x0 + len * (-b));
p1.y = cvRound(y0 + len * a);
p2.x = cvRound(x0 - len * (-b));
p2.y = cvRound(y0 - len * a);
line(img, p1, p2, scalar);
}
}
int main()
{
Mat img,smallimg,gray, edge,gau, smallimg1, smallimg2, smallimg3, smallimg4;
img = imread("shubiaodian.jpg");
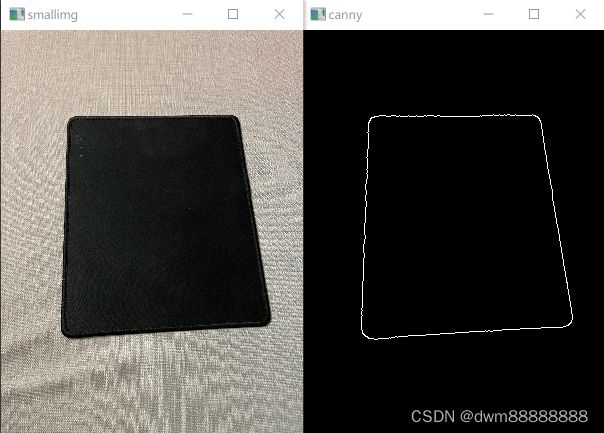
resize(img, smallimg, Size(0, 0), 0.1, 0.1);
smallimg.copyTo(smallimg1);
smallimg.copyTo(smallimg2);
smallimg.copyTo(smallimg3);
smallimg.copyTo(smallimg4);
cvtColor(smallimg, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, gau, Size(3, 3), 5, 5);
Canny(gau, edge, 150, 255);
vector lines1;
vector lines2;
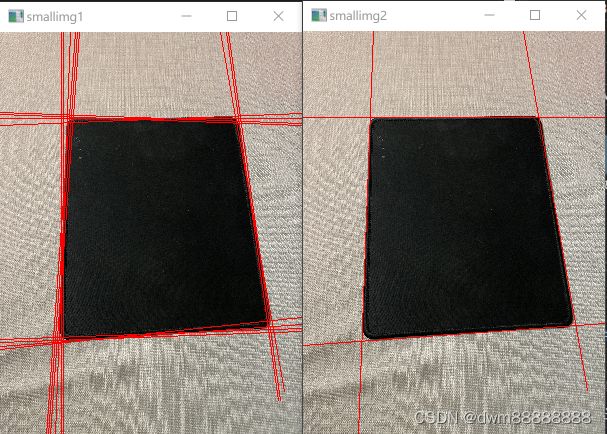
HoughLines(edge, lines1, 1, CV_PI * 2 / 180, 30);
HoughLines(edge, lines2, 1, CV_PI * 2 / 180, 80);
drawline(smallimg1, lines1, edge.rows, edge.cols, Scalar(0, 0, 255));
drawline(smallimg2, lines2, edge.rows, edge.cols, Scalar(0, 0, 255));
vector lines3;
vector lines4;
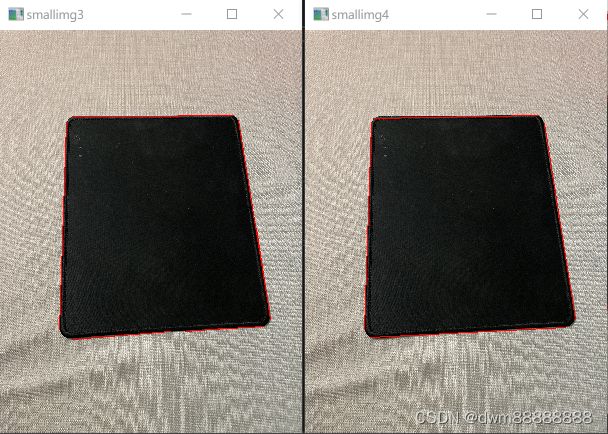
HoughLinesP(edge, lines3, 1, CV_PI / 180, 30, 0, 10);
HoughLinesP(edge, lines4, 2, CV_PI / 180, 60, 150, 80);
cout << "lines1:" << lines1.size() << endl;
cout << "lines2:" << lines2.size() << endl;
cout << "lines3:" << lines3.size() << endl;
cout << "lines4:" << lines4.size() << endl;
for (int i = 0; i < lines3.size(); i++)
{
line(smallimg3, Point(lines3[i][0], lines3[i][1]), Point(lines3[i][2], lines3[i][3]), Scalar(0,0,255));
}
for (int i = 0; i < lines4.size(); i++)
{
line(smallimg4, Point(lines4[i][0], lines4[i][1]), Point(lines4[i][2], lines4[i][3]), Scalar(0,0,255));
}
imshow("smallimg", smallimg);
imshow("canny", edge);
imshow("smallimg1", smallimg1);
imshow("smallimg2", smallimg2);
imshow("smallimg3", smallimg3);
imshow("smallimg4", smallimg4);
waitKey(0);
return 1;
}