【计算机网络】简易TCP网络小程序
文章目录
- 1. 简易TCP网络程序
-
- 1.1 服务端
-
- 1.1.1 服务端创建套接字
- 1.1.2 服务端绑定
- 1.1.3 服务端监听
- 1.1.4 服务端获取连接
- 1.1.5 服务端处理请求
- 1.2 客户端
-
- 1.2.1 客户端创建套接字
- 1.2.2 客户端连接服务器
- 1.2.3 客户端发起请求
- 1.3 服务器测试
- 1.4 单执行流服务器的弊端
- 2. 多进程版的TCP网络小程序
- 3. 多线程版的TCP网络小程序
- 4. 线程池版的TCP网络小程序
1. 简易TCP网络程序
1.1 服务端
1.1.1 服务端创建套接字
我们将TCP服务器封装成一个类,当我们定义出一个服务器对象后需要马上对服务器进行初始化,而初始化TCP服务器要做的第一件事就是创建套接字。
TCP服务器在调用socket函数创建套接字时,参数设置如下:
- 协议家族选择AF_INET,因为我们要进行的是网络通信
- 创建套接字所需的服务类型为SOCK_STREAM,因为我们编写的是TCP服务器,SOCK_STREAM提供的就是一个有序的、可靠的、全双工的、基于连接的流式服务。
- 协议类型默认设置为0即可
class TcpServer
{
public:
void InitServer()
{
_sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (_sockfd < 0)
{
std::cerr << "socket error" << std::endl;
exit(2);
}
}
~TcpServer()
{
if (_sockfd >= 0)
close(_sockfd);
}
private:
int _sockfd;
};
如果创建套接字后获得的文件描述符是小于0的,说明套接字创建失败,此时也就没必要进行后续操作了,直接终止程序即可。
说明一下:实际TCP服务器创建套接字的做法与UDP服务器是一样的,只不过TCP服务器需要的是流式服务,而UDP服务器需要的是用户数据报服务。
1.1.2 服务端绑定
套接字创建完毕之后我们实际只是在系统层面上打开了一个文件,该文件还没有与网络关联起来,因此创建完套接字之后我们还需要用bind函数进行绑定。
- 定义一个struct sockaddr_in结构体,将服务器相关的属性信息填充到该结构体当中,比如协议家族、IP地址、端口号等。
- 填充服务器网络相关信息时,协议家族对应就是AF_INET,端口号就是当前TCP服务器程序的端口号。在设置端口号时,需要调用htons函数将端口号由主机序列转换为网络序列。
- 在设置服务器的IP地址时,我们可以设置为本地环回127.0.0.1,表示本地通信。也可以设置为公网IP地址,表示网络通信。
- 如果使用的是云服务器,那么在设置服务器的IP地址时,不需要显式绑定IP地址,直接将地址设置为INADDR_ANY即可,此时服务器就可以从本地任何一张网卡中读取数据。此外,由于INADDR_ANY本质就是0,因此在设置时不需要进行网络字节序的转换。
- 填充完服务器网络相关的属性信息后,需要调用bind函数进行绑定。绑定实际就是将文件与网络关联起来。
由于TCP服务器初始化时需要服务器的端口号,因此在服务器类中需要引入端口号,当实例化服务器对象时就需要传入一个端口号。而由于我当前使用的是云服务器,因此在绑定TCP服务器的IP地址时不能绑定公网IP地址,直接绑定INADDR_ANY即可,因此我这里没有在服务器类当中引入IP地址。
void InitServer()
{
_sockfd = socket(AF_INET, SOCK_STREAM, 0);
if (_sockfd < 0)
{
std::cerr << "socket error" << std::endl;
exit(2);
}
// 绑定
struct sockaddr_in local;
memset(&local, 0, sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
int ret = bind(_sockfd, (struct sockaddr*)&local, sizeof(local));
if (ret < 0)
{
std::cerr << "bind error" << std::endl;
exit(3);
}
}
1.1.3 服务端监听
UDP服务器的初始化操作只有两步,第一步是创建套接字,第二步是绑定。而TCP服务器是面向连接的,客户端在正式向TCP服务器发送数据之前,需要先与TCP服务器建立连接,然后才能与服务器进行通信。
因此TCP服务器需要时刻注意是否有客户端发来连接请求,此时就需要将TCP服务器创建的套接字设置为监听状态。
listen函数
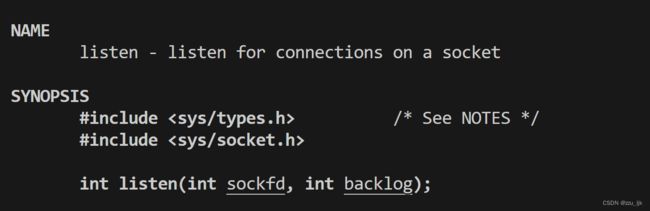
参数说明:
- sockfd:需要设置为监听状态的套接字对应的文件描述符
- backlog:全连接队列的最大长度。如果有多个客户端同时发来连接请求,此时未被服务器的连接就会放入连接队列,该参数代表的就是这个全连接队列的最大长度,一般不要设置太大,设置为5或10即可。
返回值说明:
- 监听成功返回0,监听失败返回-1,同时错误码会被设置。
服务器监听
TCP服务器在创建完套接字和绑定之后,需要再进一步将套接字设置为监听状态,监听是否有新的连接到来。如果监听失败也没必要进行后续操作了,因为监听失败也就意味着TCP服务器无法接收客户端发来的连接请求,因此监听失败我们直接终止程序即可。
这里在监听时,我们将变量名修改为监听套接字。并且BACKLOG是我自己定义的一个宏,大小为5。
class TcpServer
{
public:
void InitServer()
{
_listen_sock = socket(AF_INET, SOCK_STREAM, 0);
if (_listen_sock < 0)
{
std::cerr << "socket error" << std::endl;
exit(2);
}
// 绑定
struct sockaddr_in local;
memset(&local, 0, sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
int ret = bind(_listen_sock, (struct sockaddr*)&local, sizeof(local));
if (ret < 0)
{
std::cerr << "bind error" << std::endl;
exit(3);
}
// 监听
ret = listen(_listen_sock, BACKLOG);
if (ret < 0)
{
std::cerr << "listen error" << std::endl;
exit(4);
}
}
~TcpServer()
{
if (_listen_sock >= 0)
close(_listen_sock);
}
private:
int _listen_sock;
int _port; // 端口号
};
注意:
- 初始化TCP服务器时创建的套接字并不是普通的套接字,而应该叫做监听套接字。为了表明寓意,我们将代码中的_sockfd改为_listen_sock。
- 在初始化TCP服务器时,只有创建套接字成功、绑定成功、监听成功,此时TCP服务器才算初始化完成。
1.1.4 服务端获取连接
TCP服务器初始化成功就可以开始运行了,单TCP服务器在与客户端进行通信之前,服务器需要先获取到客户端的连接请求。
accept函数
获取连接的函数叫做accept,该函数的原型如下:

参数说明:
- sockfd:监听套接字,表示从该监听套接字中获取连接
- addr:对端网络相关的属性信息,包括协议家族、IP地址、端口号等。
- addrlen:调用时传入期望读取的addr结构体的长度,返回时代表实际读取到的addr结构体的长度,这是一个输入输出型参数。
返回值说明:
- 获取连接成功返回接收到的套接字的文件描述符,获取连接失败返回-1,同时错误码被设置。
accept返回的套接字是什么?
调用accept函数获取连接时,是从监听套接字中获取的。如果accept函数获取连接成功,此时会返回接收到的套接字对应的文件描述符。
监听套接字与accept函数返回的套接组的区别:
- 监听套接字:用于获取客户端发来的连接请求。accept函数会不断从监听套接字当中获取连接。
- accept函数返回的套接字:用于为本次accept获取到的连接提供服务。监听套接字的任务只是不断获取新连接,而真正为这些连接提供服务的套接字是accept函数返回的套接字,而不是监听套接字。
服务端获取连接
服务器获取连接时要注意:
- accept函数获取连接时可能会失败,但TCP服务器不会因为获取某个连接失败而退出,因此服务器获取连接失败后应该继续获取连接。
- 如果要将获取到的连接对应客户端的IP地址和端口号信息进行输出,需要调用inet_ntoa函数将整数IP转换成字符串IP,调用ntohs整数将端口号由网络序列转换成主机序列。
- inet_ntoa函数在底层其实实际做了两个工作,一是将网络序列转换成主机序列,二是将主机序列的整数IP转换成字符串风格的点分十进制的IP。
void start()
{
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
}
}
服务端测试
现在我们做一下简单的测试,看看当前服务器是否能成功接收连接请求。在运行服务端时需要传入一个端口号作为服务端的端口号,然后我们用该端口号构造一个服务端对象,对服务端进行初始化之后启动服务器。
int main(int argc, char* argv[])
{
if (argc != 2)
{
std::cout << "Usage: " << argv[0] << " port" << std::endl;
exit(1);
}
int port = atoi(argv[1]);
TcpServer* svr = new TcpServer(port);
svr->InitServer();
svr->start();
return 0;
}
![]()
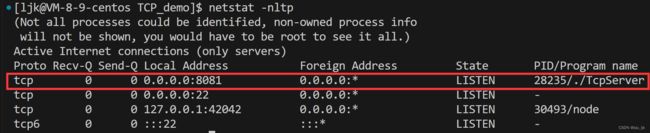
服务端运行之后,通过netstat命令可以查看到一个程序名为TcpServer的服务程序,它绑定的端口就是8081,而由于服务器绑定的是INADDR_ANY,因此该服务器的本地IP地址是0.0.0.0,这就意味着该TCP服务器可以读取本地任何一张网卡里面的数据。此外,最重要的是当前服务器所处的状态是LISTEN状态,表明当前服务器可以接收外部的请求连接。

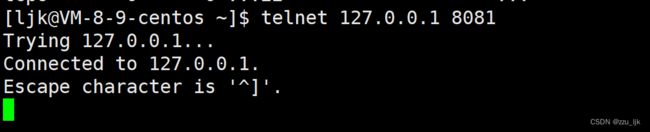
虽然现在还没有编写客户端相关的代码,但是我们可以使用telnet命令远程登录到该服务器,因为telnet底层实际采用的就是TCP协议。
使用telnet命令连接当前TCP服务器后可以看到,此时服务器接收到了一个连接,为该连接提供服务的套接字对应的文件描述符就是4。因为0、1、2是默认打开的,而3号文件描述符在初始化服务器时分配给了监听套接字,因此当第一个客户端发起连接请求时,为该客户端提供服务的套接字对应的文件描述符就是4。

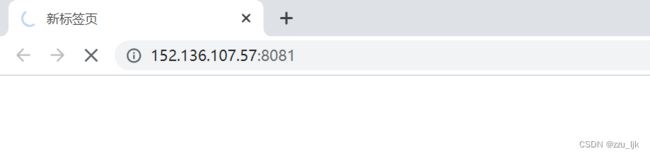
当然,也可以直接用浏览器来访问这个TCP服务器,因为浏览器常见的应用层协议是http或https,其底层对应的也是TCP协议,因此浏览器也可以向当前这个TCP服务器发起连接请求。

1.1.5 服务端处理请求
现在TCP服务器已经能够获取到连接请求了,下面就是要对获取到的连接进行处理。但此时为客户端提供服务的不是监听套接字,而是accept函数返回的套接字,下面就将其称为服务套接字。
为了让通信双方都能看到对应的消息,我们这里就实现一个简单的回声TCP服务器,服务端在为客户端提供服务时就简单地让客户端发来的数据进行输出,并且客户端发来的数据重新发回客户端即可。当客户端拿到服务端的相应数据后再将数据进行打印输出,此时就能确保服务端和客户端能够正常通信了。
read函数
TCP服务器读取数据的函数叫做read,该函数的函数原型如下:

参数说明:
- fd:从该文件描述符中读取数据
- buf:数据的存储位置,表示将读取到数据存储到该位置
- count:表示可以读取数据的最大字节数
返回值说明:
- 如果返回值大于0,则表示本次实际读取到的字节数
- 如果返回值等于0,则表示对端已经把连接关闭了。
- 如果返回值小于0,则表示读取时遇到了错误。
read返回0时表示对端连接关闭
这实际和本地进程间通信中的管道通信是类似的,当使用管道进行通信时,可能会出现如下情况:
- 写端进程不写,读端进程一直读,此时读端进程就会被挂起。
- 读端进程不读,写端进程一直写,此时写端进程就会被挂起。
- 写端进程将数据写完后将写端关闭,此时当读端进程将管道当中的数据读完后就会读到0。
- 读端进程将读端关闭,此时写端进程就会被操作系统杀死,因为此时写端进程写入的数据不会被读取。
这里的写端就对应客户端,如果客户端将连接关闭了,那么此时客户端将套接字当中的信息读完后就会读到0,因此如果服务端调用read函数后得到的返回值为0,此时服务端就不必再为该客户端提供服务了。
write函数
TCP服务器写入数据的函数叫做write,该函数的函数原型如下:

参数说明:
- fd:特定的文件描述符,表示将数据写入该文件描述符对应的套接字
- buf:需要写入的数据缓冲区
- count:需要写入的字节个数
返回值说明:
- 写入成功返回实际写入的字节数,写入失败返回-1,同时错误码会被设置。
当服务端调用read函数接受到客户端的数据后,就可以再调用write函数将该数据再响应给客户端。
服务端处理请求
需要注意的是,服务端读取数据是服务套接字中读取的,而写入数据的时候也是写入进服务套接字的。也就是说这里为客户端提供服务的套接字,即可以读取数据也可以写入数据,这就是TCP全双工的通信的体现。
在从服务套接字中读取客户端发来的数据时,如果调用read函数之后得到的返回值为0,或者读取出错了,此时就应该直接将服务套接字对应的文件描述符关闭。因为文件描述符的本质就是数组的下标,因此文件描述符的资源是有限的,如果我们一直占用,那么可用的文件描述符就后越来越少,因此服务完客户端后要及时关闭对应的文件描述符,否则会导致文件描述符泄漏。
void start()
{
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
// 处理请求
Service(sock, client_ip, client_port);
}
}
void Service(int sock, std::string client_ip, int client_port)
{
char buffer[1024];
while (1)
{
ssize_t size = read(sock, buffer, sizeof(buffer));
if (size > 0)
{
buffer[size] = 0;
std::cout << "[" << client_ip << ":" << client_port << "]# " << buffer << std::endl;
write(sock, buffer, size);
}
else if (size == 0)
{
std::cout << client_ip << ":" << client_port << " close!" << std::endl;
break;
}
else
{
std::cerr << sock << " read error!" << std::endl;
break;
}
}
close(sock); // 归还文件描述符
std::cout << client_ip << ":" << client_port << " service done!" << std::endl;
}
1.2 客户端
1.2.1 客户端创建套接字
同样地,我们将客户端也封装成一个类,当我们定义出一个客户端对象后也需要对其进行初始化,而初始化客户端唯一要做的就是创建套接字。而客户端在创建socket套接字时,参数设置与服务端创建套接字是一样的。
客户端不需要进行绑定和监听:
- 服务端要进行绑定是因为服务器的IP地址和端口号必须要众所周知,不能随意改变。而客户端虽然也需要IP地址和端口号,但是客户端并不需要我们进行绑定操作,客户端连接服务端时系统会自动指定一个端口号给客户端。
- 服务端需要进行监听是因为服务端需要通过监听来获取新连接,但是不会有人主动连接客户端,因此客户端是不需要进行监听操作的。
此外,客户端必须要知道它要连接的服务端的IP地址和端口号,因此客户端除了要有自己的套接字之外,还需要知道服务端的IP地址和端口号,这样客户端才能够通过套接字向指定服务器进行通信。
class TcpClient
{
public:
TcpClient(std::string server_ip, int server_port)
: _sock(-1), _server_ip(server_ip), _server_port(server_port)
{}
void InitClient()
{
_sock = socket(AF_INET, SOCK_STREAM, 0);
if (_sock < 0)
{
std::cerr << "socket error" << std::endl;
exit(2);
}
}
~TcpClient()
{
if (_sock >= 0) close(_sock);
}
private:
int _sock; // 套接字
std::string _server_ip; // 服务端IP地址
int _server_port; // 服务端端口号
};
1.2.2 客户端连接服务器
由于客户端不需要绑定,也不需要监听,因此客户端创建完套接字之后就可以向服务端发起请求。
connect函数
发起连接请求的函数叫做connect函数,该函数的原型如下:

参数说明:
- sockfd:特定的套接字,表示通过该套接字发起连接请求。
- addr:对端网络相关的属性信息,包括协议家族、IP地址、端口号等。
- addrlen:传入的addr结构体长度
返回值说明:
- 连接或绑定成功返回0,连接失败返回-1,同时错误码会被设置。
客户端连接服务器
需要注意的是,客户端不是不需要进行绑定,而是不需要程序员进行绑定,当客户端向服务端发起连接请求时,系统会给客户端随机指定一个端口号进行绑定。因为通信双方都必须要有IP地址和端口号,否则无法唯一标识通信双方。也就是说,如果connect函数调用成功了,客户端本地会随机给该客户端绑定一个端口号发送给对端服务器。
此外,调用connect函数向服务端发起连接请求时,需要传入服务端对应的网络信息,否则connect函数也不知道该客户端到底是要向哪一个服务端发起连接请求。
void start()
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
peer.sin_family = AF_INET;
peer.sin_addr.s_addr = inet_addr(_server_ip.c_str();
peer.sin_port = htons(_server_port);
int ret = connect(_sock, (struct sockaddr*)&peer, sizeof(peer));
if (ret == 0)
{
std::cout << "connect success..." << std::endl;
}
else
{
std::cerr << "connect fail..." << std::endl;
exit(3);
}
}
1.2.3 客户端发起请求
由于我们实现的是一个简单的回声服务器,因此当客户端连接到服务端之后,客户端就可以向服务端发送数据了,这里我们可以让客户端将用户输入的数据发送给服务器,发送时调用write函数向套接字当中写入数据即可。
当客户端将数据发送给服务端后,由于服务端读取到数据后还会进行回显,因此客户端在发送数据后还需要调用read函数读取服务端的相应数据,然后将该相应数据进行打印,以确定双方通信无误。
void Request()
{
std::string msg;
char buffer[1024];
while (1)
{
std::cout << "Please Enter# ";
getline(std::cin, msg);
write(_sock, msg.c_str(), msg.size());
ssize_t size = read(_sock, buffer, sizeof(buffer) - 1);
if (size > 0)
{
buffer[size] = 0;
std::cout << "server echo# " << buffer << std::endl;
}
else if (size == 0)
{
std::cout << "server close!" << std::endl;
break;
}
else
{
std::cerr << "read error!" << std::endl;
break;
}
}
}
在运行客户端程序时我们需要携带对应的IP地址和端口号,然后我们就可以通过服务端的IP地址和端口号构造出一个客户端对象,对客户端进行初始化后启动客户端即可。
int main(int argc, char* argv[])
{
if (argc != 3)
{
std::cout << "Usage: " << argv[0] << " server_ip server_port" << std::endl;
exit(1);
}
std::string server_ip = argv[1];
int server_port = atoi(argv[2]);
TcpClient* clt = new TcpClient(server_ip, server_port);
clt->InitClient();
clt->start();
return 0;
}
1.3 服务器测试
下面我们运行服务端和客户端,运行结果如下:

此时用netstat命令进行查看:
可以看到服务器是处于监听状态的。
1.4 单执行流服务器的弊端
当我们仅用一个客户端连接服务器时,这一个客户端能够正常享受到服务端的服务。但在这个客户端正在享受服务端的服务时,我们让另一个客户端也连接服务器,此时虽然该客户端可以连接成功,但是这个客户端发送给服务端的消息是不能在服务端进行打印的,也不能回显给该客户端。只有当第一个客户端退出之后,第二个客户端发送的数据才可以打印在服务端,也才可以回显给客户端。
即使这样,客户端为什么还会显示连接成功?
当服务端在给第一个客户端提供服务期间,第二个客户端向服务端发起的请求是成功的,只不过服务端没有调用accept函数将该连接获取上来罢了。
实际在底层会有一个连接队列,服务端有accept的新连接就会放在这个连接队列当中,而这个连接队列的最大长度就是通过listen函数的第二个参数决定的,服务端虽然没有获取第二个客户端发来的连接请求,但是在它看来,它是连接成功的。
如何解决上面的问题?
单执行流的服务器一次只能给一个客户端提供服务,此时服务器的资源并没有得到充分利用,因此服务器一般是不会写成单执行流的。要解决这个问题就需要将服务器改为多执行流,此时就要引入多进程或者多线程。
2. 多进程版的TCP网络小程序
当服务端调用accept函数获取到新连接之后不是由当前执行流为该连接提供服务,而是当前执行流调用fork函数创建子进程,然后子进程为父进程获取到的连接提供服务。
由于父子进程是两个不同的执行流,当父进程调用fork创建出子进程之后,父进程就可以继续从监听套接字当中获取新连接,而不用关心获取上来的连接是否服务完毕。
子进程继承父进程的文件描述符表
需要注意的是,文件描述符表是隶属于一个进程的,子进程创建之后会继承父进程的文件描述符表。
但当父进程创建子进程之后,此时父进程文件描述符表的变化不会影响子进程。最典型的代表就是匿名管道,父子进程在使用匿名管道进行通信时,父进程先调用pipe函数得到两个文件描述符,一个是管道读端的文件描述符,一个是管道写端的文件描述符,此时父进程创建出来的子进程就会继承这两个文件描述符,之后父子进程一个关闭管道的读端,一个关闭管道的写端,这时父子进程创建文件描述符表的变化是不会相互影响的,此后父子进程就可以通过这个管道进行单向通信了。
对于套接字文件也是一样的,父进程创建的子进程也会继承父进程的套接字文件,此时子进程就能够对特定的套接字文件进行读写操作,进而完成对对应客户端的服务。
等待子进程问题
当父进程创建出子进程之后,父进程是需要等待子进程退出的,否则子进程会变成僵尸进程,进而造成内存泄漏。因此服务端创建子进程后需要调用wait或waitpid函数对子进程进行等待。
阻塞式等待与非阻塞式等待:
- 如果服务器采用阻塞的方式进行等待子进程,那么服务器还是需要等待服务完当前客户。
- 如果服务器采用非阻塞的方式等待子进程,虽然在子进程为客户端提供服务期间服务端可以继续获取新连接,但此时服务端就需要将所有子进程的PID保存下来,并且需要不断花费时间检测子进程是否退出。
总之,服务端要等待子进程退出,无论是采用阻塞式等待还是非阻塞式等待,都不尽人意。此时我们可以考虑让服务端不等待子进程退出。
不等待子进程的方式
让父进程不等待子进程退出,有两种方法:
- 捕捉SIGCHLD信号,将其处理动作设置为忽略
- 让父进程创建子进程,子进程再创建孙子进程,最后让孙子进程为客户端提供服务。
捕捉SIGCHLD信号
当子进程退出时会给父进程发送SIGCHLD信号,如果父进程将SIGCHLD信号进行捕捉,并且将信号的处理动作设置为忽略,此时父进程就只需专心处理自己的工作,不必关心子进程了。
这种方式实现起来非常简单,也是比较推荐的一种做法。
void start()
{
signal(SIGCHLD, SIG_IGN);
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
// 处理请求
pid_t id = fork();
if (id == 0)
{
Service(sock, client_ip, client_port);
exit(0);
}
}
}
让孙子进程提供服务
我们也可以让服务端创建出来的子进程进行fork创建出孙子进程,让孙子进程为客户端提供服务。
这里的命名说明:
- 爷爷进程:在服务端调用accept函数获取客户端连接请求的进程
- 爸爸进程:由爷爷进程调用fork函数创建出来的进程
- 孙子进程:由爸爸进程调用fork函数创建出来的进程
我们让爸爸进程创建完孙子进程后立刻退出,此时爷爷进程调用wait或者waitpid函数等待爸爸进程就能立刻等待成功,然后爷爷进程就可以继续使用accept函数获取客户端的连接请求。
不需要等待孙子进程退出
由于爸爸进程创建完孙子进程之后就立刻退出了,因此此时为客户端提供服务的进程变为了孤儿进程,该进程会被系统领养,当孙子进程为客户端提供完服务退出后系统会回收孙子进程,所以爷爷进程是不需要等待孙子进程退出的。
关闭对应的文件描述符
爷爷进程调用accept函数获取到新连接之后,会让孙子进程为该连接提供服务,此时服务进程已经将文件描述符表继承给了爸爸进程,而爸爸进程又会调用fork函数创建出孙子进程然后再将文件描述符表继承给孙子进程。
而父子进程创建之后,它们各自的文件描述符表是独立的,不会相互影响。因此服务进程在调用fork函数之后,服务进程就不需要关心刚才从accept函数获取到的文件描述符了,此时服务进程就可以调用close函数将该文件描述符进行关闭。
同样的,对于爸爸进程和孙子进程来说,它们是不需要关心从爷爷进程继承下来的监听套接字的,因此爸爸进程可以将监听套接字关掉。
关闭文件描述符的必要性:
- 对于服务进程来说,当它调用fork函数后就必须将从accept函数获取的文件描述符关掉。因为服务进程会不断调用accept函数获取新的文件描述符(服务套接字),如果服务进程不及时关掉不用的文件描述符,最终服务进程中可用的文件描述符会越来越少。
- 对于爸爸进程和孙子进程来说,还是建议关闭从服务进程继承下来的文件描述符。实际就算它们不关闭监听套接字,最终也只会导致这一个文件描述符泄漏,但还是建议关上。因为孙子进程在提供服务时可能会对监听套接字进行误操作,此时就会修改监听套接字的内容。
void start()
{
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
// 处理请求
// 1. 将SIGCHLD信号设置为忽略
// pid_t id = fork();
// if (id == 0)
// {
// Service(sock, client_ip, client_port);
// exit(0);
// }
// 2. 创建孙子进程
pid_t id = fork();
if (id == 0)
{
close(_listen_sock);
if (fork() > 0) exit(0);
Service(sock, client_ip, client_port);
exit(0);
}
}
}
3. 多线程版的TCP网络小程序
创建进程的成本是很高的,创建进程时需要创建该进程对应的进程控制块(task_struct)、进程地址空间(mm_struct)、页表等数据结构。而创建线程的成本比创建进程的成本小很多,因为线程本质是在进程地址空间内运行,创建出来的线程会共享该进程的大部分数据,因此在实现多执行流的服务器时最好采用多线程进行实现。
当服务器进程调用accept函数获取到一个新连接之后,就可以直接创建一个线程,让该线程为对应客户端提供服务。
当然,主线程创建出新线程之后,也是需要等待新线程退出的,否则也会造成类似于僵尸进程这样的问题。但是对于线程来说,如果不想让主线程等待新线程退出,可以让创建出来的新线程调用pthread_detach函数进行线程分离,当这个线程退出系统时会自动回收该线程对应的资源。此时主线程就可以继续调用accept函数获取新连接,而让新线程去服务对于的客户端。
多个线程共享一张文件描述符表
文件描述符表维护的是进程与文件之间的对应关系,因此一个进程对应一张文件描述符表。而主线程创建出来的新线程依旧属于这个进程,因此创建线程时并不会为该线程创建独立的文件描述符表,所有的线程看到的同一张文件描述符表。
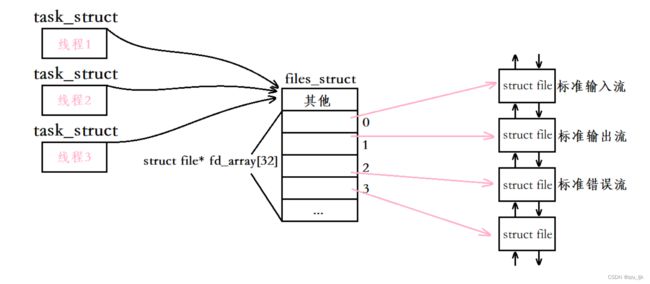
因此将主线程调用accept函数获取到一个文件描述符之后,其他新创建的线程是可以直接访问该文件描述符的。
需要注意的是,虽然新线程能够访问主线程accept上来的文件描述符,但此时新线程并不知道它所无误的客户端对应的是哪一个文件描述符,因此主线程创建新线程之后需要告诉新线程应该访问的文件描述符的值,也就是告诉每个新线程在服务客户端时,应该对哪一个套接字进行操作。
参数结构体
实际新线程在位客户端提供服务时就是调用Service函数,而调用Service函数是需要传入三个参数的,分别是客户端对应的套接字、IP地址和端口号。因此主线程创建新线程时需要给新线程传入三个参数,而实际在调用pthread_create函数创建新线程时,只能传入一个参数。
这是我们可以设计一个结构体Param,此时这三个参数就可以放到Param结构体当中,当主线程创建新线程时就可以定义一个Param对象,将客户端对应的套接字、IP地址和端口号设计进这个Param对象当中,然后将Param对象的地址作为新线程执行例程的参数进行传入。
此时新线程在执行例程当中再将这个void类型的参数强转为Param类型,然后就能够拿到客户端对应的套接字、IP地址和端口号了。
class Param
{
public:
Param(int sock, std::string ip, int port)
: _sock(sock), _ip(ip), _port(port)
{}
public:
int _sock;
std::string _ip;
int _port;
};
Service函数定义为静态成员函数
由于调用pthread_create函数创建线程时,新线程的执行例程的第一个参数为void*,如果我们要将这个执行例程定义到类内,就需要将其定义为静态成员函数,否则这个执行例程的第一个参数是隐藏的this指针。
在线程的执行例程中会调用Service函数,由于执行例程是静态成员函数,静态成员函数无法调用非静态成员函数,因此我们需要将Service函数定义为静态成员函数。恰好Service函数内部进行的操作都是与类无关的,因此我们直接在Service函数前面加上一个static即可。
整体代码如下:
void start()
{
signal(SIGCHLD, SIG_IGN); // 忽略SIGCHLD信号
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
// 处理请求
// 1. 将SIGCHLD信号设置为忽略
// pid_t id = fork();
// if (id == 0)
// {
// Service(sock, client_ip, client_port);
// exit(0);
// }
// 2. 创建孙子进程
// pid_t id = fork();
// if (id == 0)
// {
// close(_listen_sock);
// if (fork() > 0) exit(0);
// Service(sock, client_ip, client_port);
// exit(0);
// }
// 3. 多线程
Param* p = new Param(sock, client_ip, client_port);
pthread_t tid;
pthread_create(&tid, nullptr, HandleRequest, (void*)p);
}
}
static void* HandleRequest(void* arg)
{
pthread_detach(pthread_self());
Param* p = (Param*)arg;
Service(p->_sock, p->_ip, p->_port);
delete p;
return nullptr;
}
static void Service(int sock, std::string client_ip, int client_port)
{
char buffer[1024];
while (1)
{
ssize_t size = read(sock, buffer, sizeof(buffer));
if (size > 0)
{
buffer[size] = 0;
std::cout << "[" << client_ip << ":" << client_port << "]# " << buffer << std::endl;
write(sock, buffer, size);
}
else if (size == 0)
{
std::cout << client_ip << ":" << client_port << " close!" << std::endl;
break;
}
else
{
std::cerr << sock << " read error!" << std::endl;
break;
}
}
close(sock); // 归还文件描述符
std::cout << client_ip << ":" << client_port << " service done!" << std::endl;
}
4. 线程池版的TCP网络小程序
当前多线程版服务器存在的问题:
- 每当有新连接到来时,服务器的主线程都会重新为该客户端创建为其提供服务的新线程,而当服务结束后又会将该新线程销毁。这样做不仅麻烦,而且效率低下,每当连接到来的时候服务端才创建对应提供服务的线程。
- 如果有大量的客户端连接请求,此时服务端要为每一个客户端创建对应的服务线程。计算机当中的线程越多,CPU的压力就越大,因为CPU要不断在这些线程之间来回切换,此时CPU在调度线程的时候,线程和线程之间切换的成本就会变得很高。此外,一旦线程太多,每一个线程再次被调度的周期就变长了,而线程是为客户端提供服务的,线程被调度的周期变长,客户端也迟迟得不到应答。
解决思路
针对这两个问题,对应的解决思路如下:
- 可以在服务端预先创建一批线程,当有客户端请求连接时就让这些线程为客户端提供服务,此时客户端依赖就有线程为其提供服务,而不是当客户端来了才创建对应的服务线程。
- 当某个线程为客户端提供完服务后,不要让线程退出,而是让线程继续为下一个客户端提供服务,如果当前没有客户端连接请求,则可以让该线程先进入休眠状态,当有客户端连接到来时再将该线程唤醒。
- 服务端创建的这一批线程的数量不能太多,此时CPU的压力也不会太大。此外,如果有客户端连接到来,但此时这一批线程都在各其他客户端提供服务,这时服务端不应该再创建线程,而应该让这个新来的连接请求在全连接队列中进行排队,等服务端这一批线程中有空闲线程后,再将该连接请求获取上来并未其提供服务。
引入线程池
解决这里的问题我们就需要在服务端内部引入线程池,因为线程池的存在就是为了避免处理短时间任务时创建与销毁线程的代价,此外,线程池还能够保证内核充分利用,放置过分调度。
其中在线程池里面有一个任务队列,当有新的任务到来的时候,就可以将任务Push到线程池当中,在线程池当中我们默认创建了5个线程,这些线程不断检测任务队列当中是否有任务,如果有任务就拿出任务,然后调用任务对应的Run函数对该任务进行处理,如果线程池当中没有任务那么当前线程就会进入休眠装填。
对于线程池的讲解和代码在这篇博客中。这里不再赘述。
#pragma once
#include 服务类新增线程池成员
现在服务端引入了线程池,因此在服务类中需要新增一个指向线程池的指针成员:
- 当实例化服务器对象时,先将这个线程池指针初始化为空。
- 当服务器初始化完毕之后,再构造这个线程池对象,在构造线程池对象的时候可以指定线程池当中线程的个数,也可以不指定,此时默认线程的个数为5。
- 在启动服务器之前对线程池进行初始化,此时就会将线程池当中的若干线程创建出来,而这些线程创建出来之后就会不断检测任务队列,从任务队列当中拿出任务进行处理。
现在当服务进程调用accept函数获取一个连接请求后,就会根据该客户端的套接字、IP地址以及端口号创建出一个任务,然后调用线程池提供的Push接口将该任务塞入任务队列。
这实际也是一个生产者消费者模型,其中服务进程就是任务的生产者,而线程池当中的若干线程就是消费者,它们交易的场所就是线程池当中的任务队列。
class TcpServer
{
public:
TcpServer(int port)
: _port(port)
{}
void InitServer()
{
_listen_sock = socket(AF_INET, SOCK_STREAM, 0);
if (_listen_sock < 0)
{
std::cerr << "socket error" << std::endl;
exit(2);
}
// 绑定
struct sockaddr_in local;
memset(&local, 0, sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
int ret = bind(_listen_sock, (struct sockaddr*)&local, sizeof(local));
if (ret < 0)
{
std::cerr << "bind error" << std::endl;
exit(3);
}
// 监听
ret = listen(_listen_sock, BACKLOG);
if (ret < 0)
{
std::cerr << "listen error" << std::endl;
exit(4);
}
_tp = new ThreadPool<Task>(); // 构造线程池对象
}
~TcpServer()
{
if (_listen_sock >= 0)
close(_listen_sock);
}
void start()
{
//signal(SIGCHLD, SIG_IGN); // 忽略SIGCHLD信号
_tp->ThreadPoolInit();
while (1)
{
struct sockaddr_in peer;
memset(&peer, 0, sizeof(peer));
socklen_t len = sizeof(peer);
int sock = accept(_listen_sock, (struct sockaddr*)&peer, &len);
if (sock < 0)
{
std::cerr << "accept error, continue next" << std::endl;
continue;
}
std::string client_ip = inet_ntoa(peer.sin_addr);
int client_port = ntohs(peer.sin_port);
std::cout << "get a new link->" << sock << " [" << client_ip << "]:" <<client_port << std::endl;
// 处理请求
// 1. 将SIGCHLD信号设置为忽略
// pid_t id = fork();
// if (id == 0)
// {
// Service(sock, client_ip, client_port);
// exit(0);
// }
// 2. 创建孙子进程
// pid_t id = fork();
// if (id == 0)
// {
// close(_listen_sock);
// if (fork() > 0) exit(0);
// Service(sock, client_ip, client_port);
// exit(0);
// }
// 3. 多线程
// Param* p = new Param(sock, client_ip, client_port);
// pthread_t tid;
// pthread_create(&tid, nullptr, HandleRequest, (void*)p);
Task task(sock, client_ip, client_port);
_tp->push(task);
}
}
static void* HandleRequest(void* arg)
{
pthread_detach(pthread_self());
Param* p = (Param*)arg;
Service(p->_sock, p->_ip, p->_port);
delete p;
return nullptr;
}
static void Service(int sock, std::string client_ip, int client_port)
{
char buffer[1024];
while (1)
{
ssize_t size = read(sock, buffer, sizeof(buffer));
if (size > 0)
{
buffer[size] = 0;
std::cout << "[" << client_ip << ":" << client_port << "]# " << buffer << std::endl;
write(sock, buffer, size);
}
else if (size == 0)
{
std::cout << client_ip << ":" << client_port << " close!" << std::endl;
break;
}
else
{
std::cerr << sock << " read error!" << std::endl;
break;
}
}
close(sock); // 归还文件描述符
std::cout << client_ip << ":" << client_port << " service done!" << std::endl;
}
private:
int _listen_sock; // 监听套接字
int _port; // 端口号
ThreadPool<Task>* _tp;
};
设计任务类
现在我们要做的就是设计一个任务类,该任务类当中需要包含客户端对应的套接字、IP地址、端口号,表示该任务是为哪一个客户端提供服务,对应操作的套接字是哪一个。
此外,任务类中需要包含一个Run方法,当线程池中的线程拿到任务后就会直接调用这个Run方法对该任务进行处理,而实际处理这个任务的方法就是服务类当中的Service函数,服务端就是通过调用Service函数为客户端提供服务的。
我们可以直接拿出服务类当中的Service函数,将其放到任务类当中作为任务类的Run方法,但这实际不利于软件分层。我们可以给任务类新增一个仿函数成员,当执行任务类当中的Run方法处理任务时就可以以回调的方式处理该任务。
class Task
{
public:
Task(){}
Task (int sock, std::string client_ip, int client_port)
: _sock(sock), _client_ip(client_ip), _client_port(client_port)
{}
void Run()
{
_handler(_sock, _client_ip, _client_port);
}
private:
int _sock;
std::string _client_ip;
int _client_port;
Handler _handler;
};
注意:当任务队列当中有任务时,线程池当中的线程先定义出一个Task对象,然后将这个Task对象作为输出型参数调用任务队列的Pop函数,从任务队列当中获取任务,因此Task类除了提供带参的构造函数以外,还需要提供一个无参的构造函数,方便我们定义无参对象。
设计Handler类
此时需要再设计一个Handler类,在Handler类当中对 () 操作符进行重载,将 == ()==操作符的执行动作重载为执行Service函数的代码。
class Handler
{
public:
Handler(){}
~Handler(){}
void operator()(int sock, std::string client_ip, int client_port)
{
char buffer[1024];
while (1)
{
ssize_t size = read(sock, buffer, sizeof(buffer)-1);
if (size > 0)
{
buffer[size] = 0;
std::cout << client_ip << ":" << client_port << "# " << buffer << std::endl;
write(sock, buffer, size);
}
else if (size == 0)
{
std::cout << client_ip << ":" << client_port << " close!" << std::endl;
break;
}
else
{
std::cerr << sock << " read error!" << std::endl;
break;
}
}
close(sock);
std::cout << client_ip << ":" << client_port << " service done!" << std::endl;
}
};
实际我们可以让服务器处理不同的任务,当前服务器只是在进行字符串的回显处理,而实际要这么处理这个任务完全是由任务类当中的handler成员来决定的。
如果想要让服务器处理其他任务,只需要修改Handler类当中对 () 的重载函数就行了,而服务器的初始化、启动服务器以及线程池的代码都是不需要更改的,这就叫做把通信功能和业务逻辑在软件上进行解耦。