【Docker】Docker的数据管理
Docker的数据管理
- 1.Docker的数据管理
-
- 1.1 数据卷
- 1.2 数据卷容器
- 1.3 数据管理知识点总结
- 2.端口映射
-
- 2.1 端口知识点总结
- 3.容器互联(使用centos镜像)
-
- 3.1 容器互联知识点总结
- 4. Docker镜像的创建
-
- 4.1 基于现有镜像创建
-
- 4.1.1 基于现有镜像创建总结
- 4.2 基于本地模板创建
-
- 4.2.1 基于模板文件创建总结
- 4.3 基于Dockerfile创建
-
- 4.3.1 镜像加载原理
- 4.3.2 为什么Docker里centos的大小才200M?
- 5.Dockerfile概述
-
- 5.1 Docker镜像结构的分层
- 5.2 Dockerfile操作常用的指令
- 5.3 Dockerfile案例
- 6. 知识点总结
-
- 6.1 数据管理
- 6.2 创建镜像的方法
- 6.3 基于Dockerfile创建
- 6.4 ADD和COPY的区别?
- 6.5 CMD和ENTRYPOINT的区别?
- 6.6 容器启动时运行命令的优先级
1.Docker的数据管理
管理Docker容器中的数据,主要有两种方式:数据卷(Data Volumes)和数据卷容器(DataVolumes Containers).
1.1 数据卷
(1) 数据卷:经过宿主机,实现不同容器与宿主机的数据共享
数据卷是一个供容器使用的特殊目录,位于容器中。可将宿主机的目录挂载到数据卷上,对数据卷的修改操作立刻可见,并且更新数据不会影响镜像,从而实现数据在宿主机与容器之间的迁移。数据卷的使用类似于Linux下对目录进行的mount操作。
将宿主机目录/var/www/html挂载到容器的/opt/www中。
注意: 宿主机本地目录的路径必须使用绝对路径。如果路径不存在,Docker会自动创建相应路径。
docker run -d --name web1 -v /var/www/html:/opt/www soscscs/myapp:v1 #-v选项可以在容器内创建数据卷
docker ps -a
###在容器的/opt/www目录中写入数据
docker exec -it web1 sh
ls
echo "gzy like girl.thils is docker" > /opt/www/gzy.txt
exit

返回宿主机进行查看
cat /var/www/html/gzy.txt

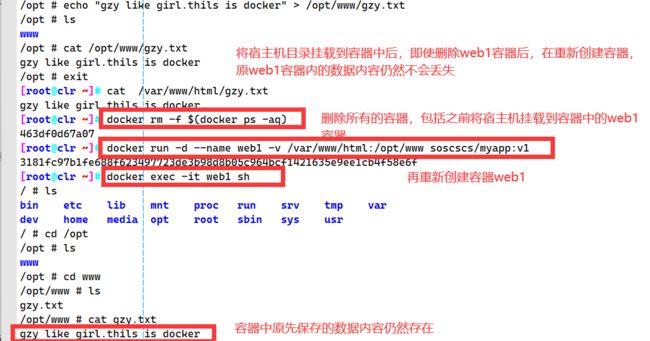
总结: 在容器web1中写入的数据内容,实际存储在宿主机的挂载目录/var/www/html中,因此在容器中修改数据内容,在属主机可以查看;同样在宿主机的/var/www/html目录中修改的数据内容,在容器中也可以查看,实现容器与宿主机之间的数据共享。
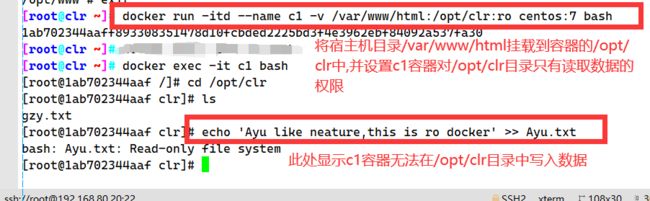
将宿主机目录/var/www/html挂载到容器的/opt/clr中,并设置c1容器对/opt/clr目录只有读取数据的权限;
docker run -itd --name c1 -v /var/www/html:/opt/clr:ro centos:7 bash
docker exec -it c1 bash
cd /opt/clr
echo 'Ayu like neature,this is ro docker' >> Ayu.txt
1.2 数据卷容器
(2)数据卷容器:不经过宿主机,实现容器间的数据共享
如果需要在容器之间共享数据,最简单的方法就是使用数据卷容器。数据卷容器是一个普通的容器,专门提供数据卷给其他容器挂载使用。
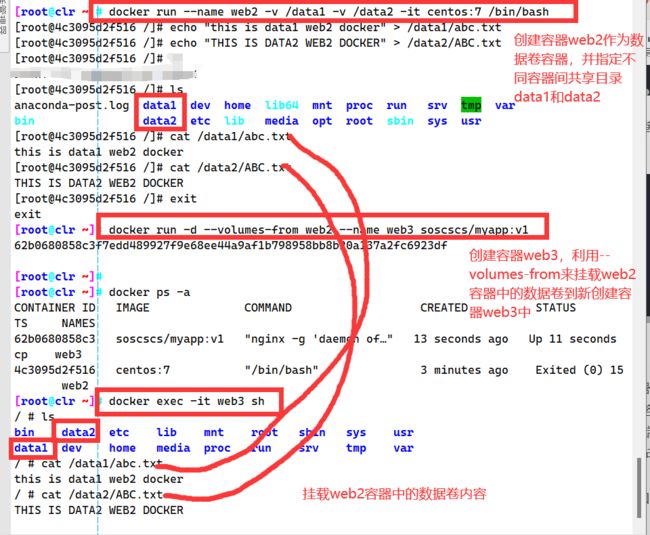
创建一个容器作为数据卷容器
docker run --name web2 -v /data1 -v /data2 -it centos:7 /bin/bash
echo "this is data1 web2 docker" > /data1/abc.txt
echo "THIS IS DATA2 WEB2 DOCKER" > /data2/ABC.txt
使用–volumes-from来挂载web2容器中的数据卷到新的容器
docker run -d --volumes-from web2 --name web3 soscscs/myapp:v1
docker ps -a
docker exec -it web3 sh
ls
cat /data1/abc.txt
cat /data2/ABC.txt
1.3 数据管理知识点总结
docker run -v 宿主机目录:容器目录[:ro] #将宿主机目录挂载到容器数据卷目录中,实现数据的持久化,其中:ro选项设置容器为只读
docker run --volumes-from 数据卷容器名 #将数据卷容器的数据卷目录共享到容器里
2.端口映射
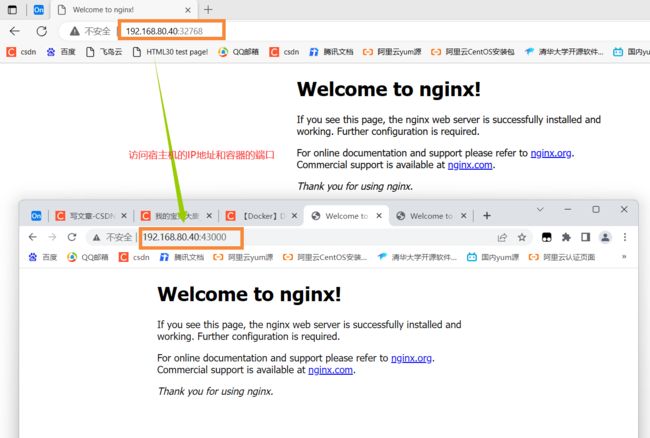
在启动容器的时候,如果不指定对应的端口,在容器外是无法通过网络来访问容器内的服务。端口映射机制将容器内的服务提供给外部网络访问,实质上就是将宿主机的端口映射到容器中,使得外部网络访问宿主机的端口便可访问容器内的服务。
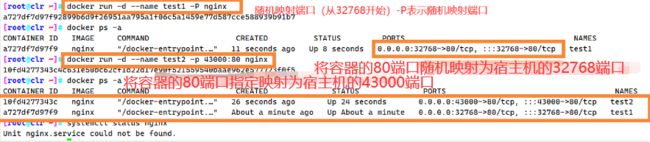
docker run -d --name test1 -P nginx #随机映射端口(从32768开始)
docker run -d --name test2 -p 43000:80 nginx #指定映射端口(将容器的80端口映射为宿主机的43000端口)
docker ps -a
浏览器访问:
http://192.168.80.40:43000
http://192.168.80.40:32768
2.1 端口知识点总结
docker run [--name 容器名] [--rm] [-it] [-d] 镜像名:标签 [容器启动命令]
-P #使用随机端口映射,从32768开始
-p 宿主机端口:容器端口 #指定端口映射
3.容器互联(使用centos镜像)
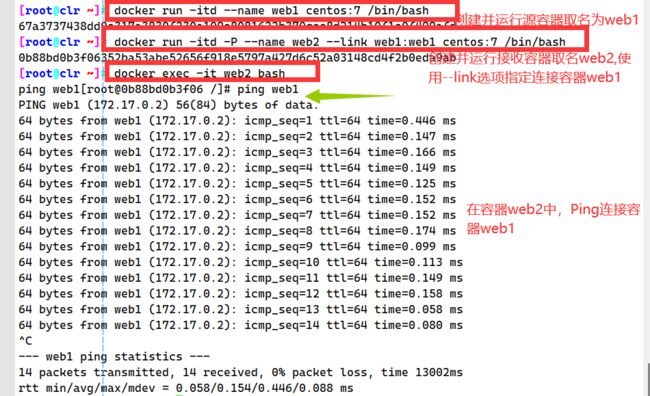
容器互联是通过容器的名称在容器间建立一条专门的网络通信隧道。简单点说,就是会在源容器和接收容器之间建立一条隧道,接收容器可以看到源容器指定的信息。
创建运行源容器,并取名为web1
docker run -itd --name web1 centos:7 /bin/bash
创建运行接收容器并取名为web2,使用–link选项指定连接容器以实现容器互联
docker run -itd -P --name web2 --link web1:web1 centos:7 /bin/bash #--link容器名:连接的别名
登录接收容器web2, ping源容器web1
docker exec -it web2 bash
ping web1
3.1 容器互联知识点总结
docker run --link 目标容器名(源容器名):连接源容器别名 #可实现通过目标容器名或连接别名与目标容器通信,也就是实现接收容器与源容器通信
4. Docker镜像的创建
创建镜像有三种方法,分别为基于已有镜像创建、基于本地模板创建以及基于Dockerfile创建。
4.1 基于现有镜像创建
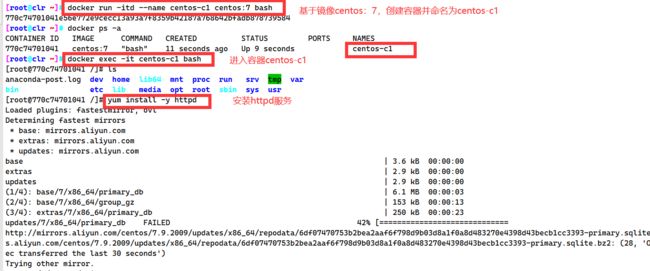
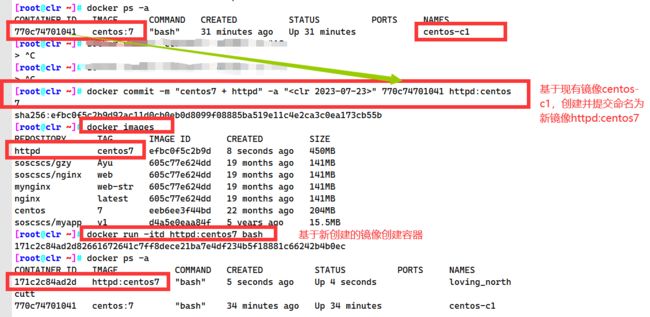
(1)首先启动一个镜像,基于镜像创建容器,更新容器内容
docker run -itd --name centos-c1 centos:7 bash
docker ps -a
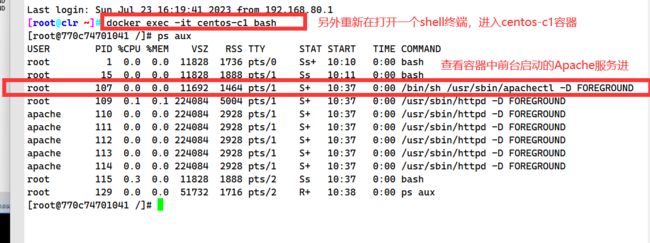
docker exec -it centos-c1 bash
yum install -y httpd
apachectl -D FOREGROUND #在前台启动Apache服务
(2)将更新后的容器(安装Apache服务),使用该容器的ID号创建新镜像
docker commit -m "centos7 + httpd" -a "" 容器ID号 镜像名:标签(httpd:centos7)
#常用选项:
-m 说明信息
-a 作者信息
-p 生成过程中停止容器的运行
docker images
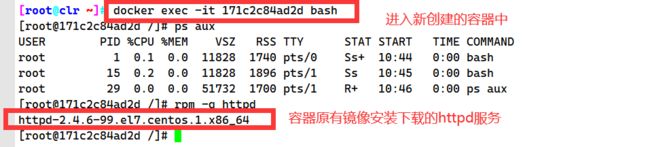
docker run -itd httpd:centos7 bash
docker exec -it 171c2c84ad2d bash
rpm -q httpd
4.1.1 基于现有镜像创建总结
总结: 在原有镜像基础上,安装Apache服务应用。然后使用docker commit提交为新的镜像文件。
先使用现有镜像创建容器 docker run
进入容器进行内容的更新 docker exec
最后提交成新的镜像 dcoker commit
4.2 基于本地模板创建
通过导入操作系统模板文件,生成镜像,模板可以从OPENVZ开源项目下载,下载地址为
http://openvz.org/Download/template/precreated
wget http://download.openvz.org/template/precreated/debian-7.0-x86-minimal.tar.gz
实例演练一:基于ubuntu镜像模板,创建容器
cd /opt/
rz -E
#ubuntu-1504-minimal-x86_64.tar.xz
docker import ubuntu-1504-minimal-x86_64.tar.xz -- ubuntu:1504
docker images
docker run -itd ubuntu:1504 bash
docker exec -it c36b31265f0d bash
cat /etc/*release

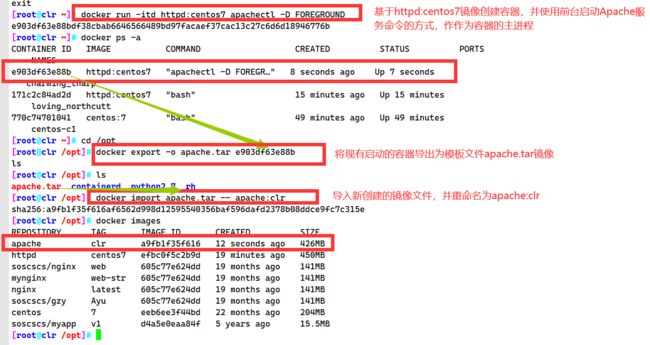
实例演练二:将现有容器导出为镜像模板文件,并基于导出的镜像文件创建容器;
docker export -o apache.tar e903df63e88b
docker import apache.tar -- apache:clr
docker images
4.2.1 基于模板文件创建总结
从本地容器到处模板文件 docker export
或从网上下载现成的模板文件http://openv.org/Download/template/precreated
将模板文件导入成镜像 docker import
4.3 基于Dockerfile创建
联合文件系统(UnionFS)
UnionFS(联合文件系统):Union文件系统(UnionFS)是一种分层、轻量级并且高性能的文件系统,它支持对文件系统的修改,作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下。AUFS、OverlayFS及Devicemapper都是一种UnionFS。
Union文件系统是Docker镜像的基础。镜像可以通过分层来进行继承,基于基础镜像(没有父镜像),可以制作各种具体的应用镜像。
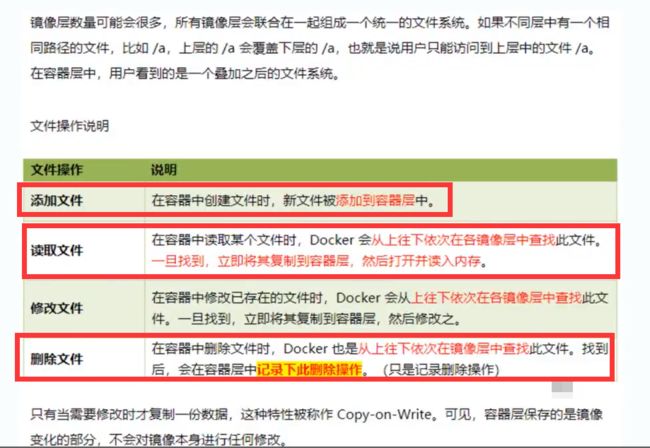
特性: 一次同时加载多个文件系统,但从外面看起来,只能看到一个文件系统,联合加载会把各层文件系统叠加起来,这样最终的文件系统会包含所有底层的文件和目录。
我们下载的时候,看到一层层的镜像文件,就是联合文件系统。
4.3.1 镜像加载原理
Docker的镜像实际上由一层一层的文件系统组成,这种层级的文件系统就是UnionFS。
-
bootfs主要包含bootloader和kernel,bootloader主要是引导加载kernel,Linux刚启动时会加载bootfs文件系统。
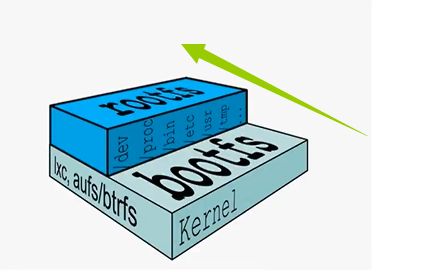
在Docker镜像的最底层是bootfs,这一层与我们典型的Linux/Unix系统是一样的,包含boot加载器和内核。当boot加载完成之后整个内核就都在内存中,此时内存的使用权已由bootfs转交给内核,此时系统也会卸载bootfs。 -
rootfs,在bootfs之上。包含的就是典型Linux系统中的/dev、/proc、/bin、/etc等标准目录和文件。rootfs就是各种不同的操作系统发行版,比如Ubuntu,Centos等等。
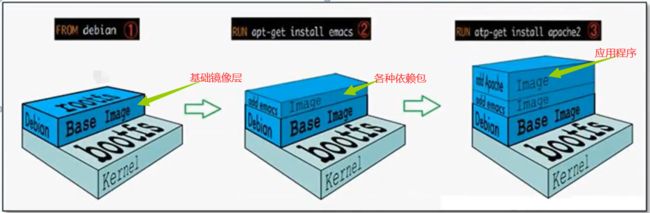
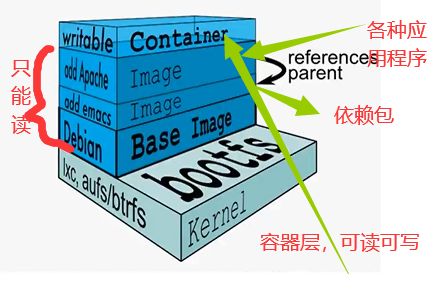
我们可以理解成一开始内核里什么都没有,操作一个命令下载debian,这时就会在内核上面加了一层基础镜像;再安装一个依赖包(emacs),会在基础镜像上叠加一层image;接着再安装一个apache,又会在images上面再叠加一层image。最后它们看起来就像一个文件系统即容器的rootfs。在Docker的体系里把这些rootfs叫做Docker的镜像。但是,此时的每一层rootfs都是read-only的,我们此时还不能对其进行操作。当我们创建一个容器,也就是将Docker镜像进行实例化,系统会在一层或多层read-only的rootfs之上分配一层空的read-write的rootfs,也就是容器层。

4.3.2 为什么Docker里centos的大小才200M?
对于精简的OS,rootfs可以很小,只需要包含最基本的命令、工具和程序库就可以了。因为底层直接用宿主机的kernel,自己只需要提供rootfs就可以。由此可见对于不同的linux发行版,bootfs基本是一致的,rootfs会有差别,因此不同的发行版可以公用bootfs。
5.Dockerfile概述
Docker镜像是一个特殊的文件系统,除了提供容器运行时所需的程序、库、资源、配置等文件外,还包含了一些为运行时准备的配置参数(如匿名卷、环境变量、用户等)。镜像不包含任何动态数据,其内容在构建之后也不会被改变。
镜像的定制实际上就是定制每一层所添加的配置、文件。如果我们可以把每一层修改、安装、构建、操作的命令都写入一个脚本,用这个脚本来构建、定制镜像,那么镜像构建透明性的问题、体积的问题就都会解决。这个脚本就是Dockerfile。
Dockerfile是一个文本文件,其内包含了一条条的指令(Instruction),每一条指令构建一层,因此每一条指令的内容,就是描述该层应当如何构建。有了Dockerfile,当我们需要定制自己额外的需求时,只需在Dockerfile上添加或者修改指令,重新生成image即可, 省去了敲命令的麻烦。
除了手动生成Docker镜像之外,可以使用Dockerfile自动生成镜像。Dockerfile是由多条指令组成的文件,其中每条指令对应Linux中的一条命令,Docker程序将读取Dockerfile中的指令生成指定镜像。
Dockerfile结构大致分为四个部分:基础镜像信息、维护者信息、镜像操作指令和容器启动时执行指令。Dockerfile每行支持一条指令,每条指令可携带多个参数,支持使用以“#“号开头的注释。
5.1 Docker镜像结构的分层
镜像不是一个单一的文件,而是有多层构成。容器其实是在镜像的最上面加了一层读写层,在运行容器里做的任何文件改动,都会写到这个读写层。如果删除了容器,也就删除了其最上面的读写层,文件改动也就丢失了。为了防止容器中的数据丢失,因此在运行容器时,应该使用-v选项,将宿主机目录挂载到容器中。Docker使用存储驱动,管理镜像每层内容及可读写的容器层。
(1)Dockerfile中的每个指令都会创建一个新的镜像层;
(2)镜像层将被缓存和复用;
(3)当Dockerfile的指令修改了,复制的文件变化了,或者构建镜像时指定的变量不同了,对应的镜像层缓存就会失效;
(4)某一层的镜像缓存失效,它之后的镜像层缓存都会失效;
(5)镜像层是不可变的,如果在某一层中添加一个文件,然后在下一层中删除它,则镜像中依然会包含该文件,只是这个文件在Docker容器中不可见了。
5.2 Dockerfile操作常用的指令
(1)FROM镜像
指定新镜像所基于的基础镜像,第一条指令必须为FROM指令,每创建一个镜像就需要一条FROM指令=。
(2)MAINTAINER名字
说明新镜像的维护人员信息
(3)RUN命令
在所基于的镜像上执行命令,并提交到新的镜像中.执行多条命令时,可以使用&&或者";",合并为一条命令执行。
(4)ENTRYPOINT [“要运行的程序”, “参数 1”, “参数 2”]
设定容器启动时,第一个运行的命令及其参数。
可以通过使用命令docker run --entrypoint来覆盖镜像中的ENTRYPOINT指令的内容。
(5)CMD [“要运行的程序”, “参数1”, “参数2”]
上面的是exec形式,shell形式:CMD 命令 参数1 参数2
启动容器时默认执行的命令或者脚本,Dockerfile只能有一条CMD命令。如果指定多条命令,只执行最后一条命令。
如果在docker run时指定了命令或者镜像中有ENTRYPOINT,那么CMD就会被覆盖。
CMD 可以为 ENTRYPOINT 指令提供默认参数。
ENTRYPOINT ["rm"]
CMD ["-rf", "/opt"]
docker run -d --entrypoint=mkdir 镜像名:标签 cat /etc
情况解析:
1.--entrypoint=mkdir存在时 #--entrypoint指定命令:会覆盖ENTRYPOINT ["rm"]和CMD ["-rf", "/opt"]中默认参数,并且会将后面的cat /etc命令当作参数,实际执行效果mkdir cat /etc
2.--entrypoint=mkdir不存在cat /etc存在时 #cat /etc会覆盖CMD ["-rf", "/opt"],然后ENTRYPOINT ["rm"]会把cat /etc命令当作参数,实际执行效果rm cat /etc
3.ENTRYPOINT ["rm"]不存在时 #cat /etc命令会覆盖CMD参数,实际执行效果cat /etc
执行优先级总结:
docker run --entrypoint >> ENTRYPOINT >> 镜像名:标签 后面的命令>> CMD默认命令参数
(6)EXPOSE端口号
指定新镜像加载到Docker时要开启的端口
(7)ENV 环境变量 变量值
设置一个环境变量的值,会被后面的RUN使用
linxu PATH=$PATH:/opt
ENV PATH $PATH:/opt
(8)ADD 源文件/目录 目标文件/目录
将源文件复制到镜像中,源文件要与 Dockerfile 位于相同目录中,或者是一个 URL
有如下注意事项:
1.如果源路径是个文件,且目标路径是以 / 结尾, 则docker会把目标路径当作一个目录,会把源文件拷贝到该目录下。
如果目标路径不存在,则会自动创建目标路径。
2.如果源路径是个文件,且目标路径是不以 / 结尾,则docker会把目标路径当作一个文件。
如果目标路径不存在,会以目标路径为名创建一个文件,内容同源文件;
如果目标文件是个存在的文件,会用源文件覆盖它,当然只是内容覆盖,文件名还是目标文件名。
如果目标文件实际是个存在的目录,则会源文件拷贝到该目录下。 注意,这种情况下,目录最好显示的以 / 结尾,以避免混淆。
3.如果源路径是个目录,且目标路径不存在,则==docker会自动以目标路径创建一个目录,把源路径目录下的文件拷贝进来。
如果目标路径是个已经存在的目录,则docker会把源路径目录下的文件拷贝到该目录下。
4.如果源文件是个归档文件(压缩文件),则docker会自动帮解压。
URL下载和解压特性不能一起使用。任何压缩文件通过URL拷贝,都不会自动解压。
(9)COPY 源文件/目录 目标文件/目录
只复制本地主机上的文件/目录复制到目标地点,源文件/目录要与Dockerfile 在相同的目录中。COPY复制效率比ADD略高。
(10 ) VOLUME [“目录”]
声明了容器中的目录作为匿名卷(/var/lib/docker/volumes/(容器ID)),但是并没有将匿名卷绑定到宿主机指定目录的功能,任何向挂载点中写入的信息都不会记录进容器存储层。
必须使用双引号,不能使用单引号
指定VOLUME只是为了避免用户忘记指定-v时导致的数据全部在容器中,这样的话容器一旦被删除所有的数据都丢失了。
VOLUME ["/var/www/html"]
docker run -d 镜像名:标签
实际执行效果:
docker run -d -v /var/lib/docker/volumes/容器ID:/var/www/html 镜像名:标签 #将宿主机目录/var/lib/docker/volumes/容器ID挂载到容器中
(11)USER 用户名/UID
指定运行容器时的用户
(12)WORKDIR 路径
为后续的 RUN、CMD、ENTRYPOINT 指定工作目录
(13)ONBUILD命令:埋雷
指定所生成的镜像作为一个基础镜像时所要运行的命令。
当在一个Dockerfile文件中加上ONBUILD指令,该指令对利用该Dockerfile构建镜像(比如为A镜像)不会产生实质性影响。
但是当编写一个新的Dockerfile文件来基于A镜像构建一个镜像(比如为B镜像)时,这时构造A镜像的Dockerfile文件中的ONBUILD指令就生效了,在构建B镜像的过程中,首先会执行ONBUILD指令指定的指令,然后才会执行其它指令。
ONBUILD rm -rf /* -->> myapp:gzy -->> clr:gzy (ONBUILD中设置的命令,会作为clr:gzy容器执行的第一条命令rm -rf /*)
(14 ) ARG
设置编译镜像时加入的参数
使用ENV指令定义的环境变量始终会覆盖同名的 ARG 指令,无论前后顺序如何
ARG CONT_IMG_VER
ENV CONT_IMG_VER=v1.0.0
RUN echo $CONT_IMG_VER
docker build --build-arg CONT_IMG_VER=v2.0.1 .
在编写Dockerfile 时,有严格的格式需要遵循:
- 第一行必须使用FROM指令,指明所基于的镜像名称;
- 之后使用MAINTAINER指令,说明维护该镜像的用户信息;
- 然后是镜像操作相关指令,如RUN指令。每运行一条指令,都会给基础镜像添加新的一层。
- 最后使用CMD指令,指定启动容器时要运行的命令操作。
5.3 Dockerfile案例
配置文件准备
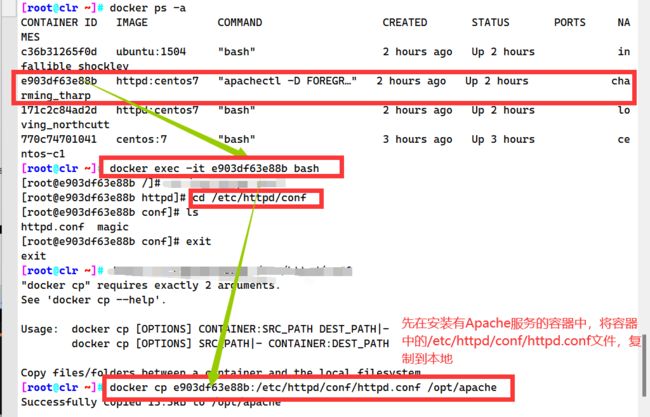
将容器中的/etc/httpd/conf/httpd.conf文件,复制到本地的/opt/apache/目录中
docker ps -a
docker exec -it e903df63e88b bash
cd /etc/httpd/conf
exit
docker cp e903df63e88b:/etc/httpd/conf/httpd.conf /opt/apache
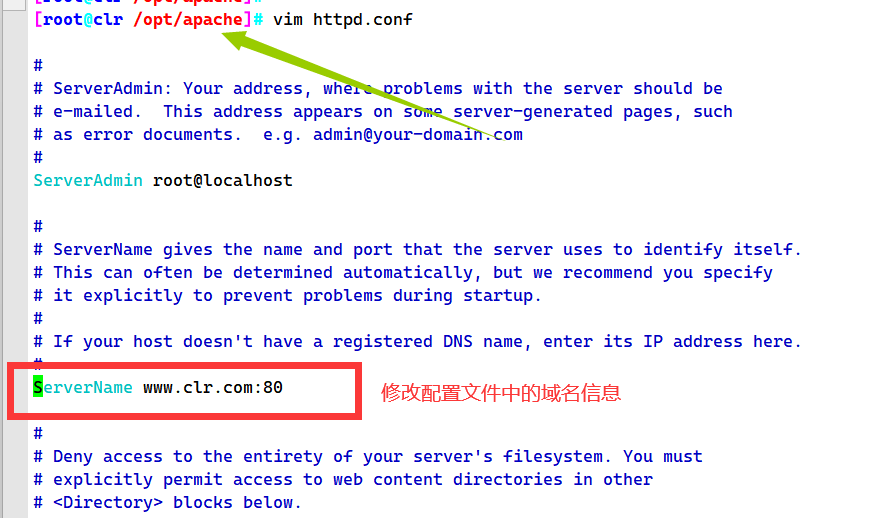
vim /opt/apache/httpd.conf
ServerName www.clr.com:80
建立Apache服务的工作目录
mkdir /opt/apache
cd /opt/apache
制作Dockerfile文件,并编写构建镜像过程
vim /opt/apache/Dockerfile
#指定基础镜像
FROM centos:7
#设置镜像维护信息(可选)
MAINTAINER this is apache image <clr 2023-07-23>
#编写构建镜像的过程
RUN yum install -y httpd
#暴露容器中应用程序的端口
EXPOSE 80
#复制宿主机当前目录中的httpd.conf文件到容器中
COPY httpd.conf /etc/httpd/conf/httpd.conf
#指定容器前台启动apache服务,CMD默认使用的命令
CMD ["/usr/sbin/apachectl","-D","FOREGROUND"]

删除系统中目前存在的所有容器和镜像
docker rm $(docker ps -aq) #删除系统中,目前现存的所有容器
docker ps -a
docker rmi -f $(docker images -q) #删除所有镜像
docker images
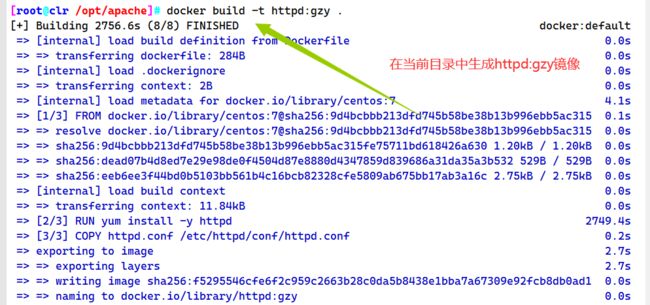
在当前目录中,生成httpd:gzy镜像
docker build -t httpd:gzy .
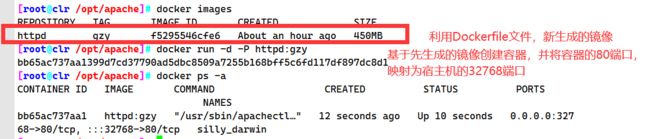
docker images
docker run -d -P httpd:gzy
docker ps -a
浏览器访问测试
http://192.168.80.20:32768

自定义web访问页面数据内容
mkdir /opt/apache/html
cd /opt/apache/html
echo 'gzy like mygirl,this is docker
' > index.html #自定义web页面内容
docker run -d -P -v /opt/apache/html/:/var/www/html httpd:gzy #创建容器,并将含有自定义web页面内容的绝对路径,挂载到容器Apache服务的网页根目录中
docker ps -a

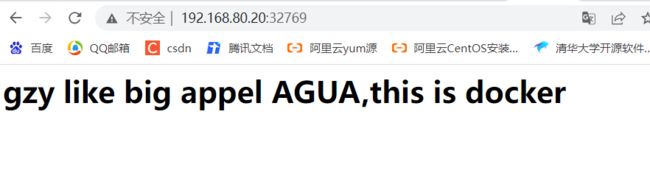
浏览器访问自定义web页面
http://192.168.80.20:32769

修改网页数据内容,实现实时更新web网页数;
echo 'gzy like big appel AGUA,this is docker
' > /opt/apache/html/index.html
6. 知识点总结
6.1 数据管理
docker run -v 宿主机目录:容器目录[:ro] #将宿主机目录挂载到容器数据卷目录中,实现数据的持久化,其中 :ro 选项设置只读
docker run --volumes-from 数据卷容器名 #将数据卷容器的数据卷目录共享到容器里
docker run --link 目标容器名:连接别名 #可实现通过日标容器名或连接别名与目标容器通信
6.2 创建镜像的方法
(1)基于现有镜像创建
先使用现有镜像创建容器 docker run
在进入容器进行内容的更新 docker exec
最后提交成新的镜像 dcoker commit
(2)基于模板文件创建
从本地容器到处模板文件 docker export
或从网上下载现成的模板文件http://openv.org/Download/template/precreated
将模板文件导入成镜像 docker import
(3)基于Dockerfile创建
6.3 基于Dockerfile创建
FROM #指定基础镜像,dockerfile构建镜像的第一个指令
MAINTAINER #指定镜像维护人员信息(可选)
RUN #指定linux命令,建议多条命令可用 && 或 ; 串起来使用
ENV #设置镜像的环境变量
EXPOSE #暴露容器端口
VOLUME #指定容器的匿名数据卷
ADD/COPY #复制本地文件/目录到镜像中
USER #指定容器的运行用户
WORKDIR #指定容器的工作目录
CMD/ENTRYPOINT #指定容器启动时执行的命令
ARG #指定构建镜像时传入的参数变量 docker build --build-arg 变量=值
6.4 ADD和COPY的区别?
COPY #只能复制本地文件/目录到镜像中
ADD #不光可以复制本地文件/目录到镜像中,还可以通过URL下载文件复制到镜像中,将本地的tar压缩包,解压后复制到镜像中(URL下载和tar包解压不能一起使用)
6.5 CMD和ENTRYPOINT的区别?
ENTRYPOINT 指定的容器启动命令由优先级更高,如果CMD和ENTRYPOINT同时存在,那么CMD指定的内容将作为ENTRYPOINT指定的命令的选项或参数使用*
6.6 容器启动时运行命令的优先级
docker run --entrypoint=命令
>> 镜像里的 ENTRYPOINT ["命令"]
>> docker run ...镜像 命令
>> CMD 里的 ["命令"]